1
Изобретение относится к области защиты электродвигателей постоянного тока механизмов, При эксплуатации которых возможен режим работы на упор. К подобным механизмам относятся, например, шахтные подъемные установки и одноковшовые экскаваторы.
Известно устройство защиты электродвигателей от перегрузки, срабатывание которого происходит с зависимой от тока двигателя выдержкой времени 1.
В этом устройстве зависимость выдержки времени от тока должна быть такой, чтобы защита срабатывала при максимально допустимой температуре обмоток двигателя.
Известно также устройство защиты, которое содержит последовательно соединенные датчик тока двигателя, функциональный преобразователь, интегратор и исполнительное реле, -к входу которого через стабилитрон токовой отсечки подключен выход датчика тока, выходом подсоединенного к измерительному шунту тока в якоре двигателя, а входы питания упомянутых датчика тока, функционального преобразователя, интегратора и исполнительного реле подключены к минусовой шине питания 2. Данное техническое решение является наиболее близким к описываемому
по технической сущности и достигаемому результату.
Однако это устройство не обеспечивает защиту двигателей постоянного тока, при эксплуатации которых возможен режим работы на упор. Действительно, при работе на упор якорь двигателя неподвижен и ток к обмотке якоря поступает через щетки и одни и те же пластины коллектора. В результате даже при токах, значительно меньших номинального (т. -е. длительно допустимого по условиям нагрева обмотки якоря), эти пластины перегреваются и коллектор выходит из строя. Так, по данным заводов-изготовителей, стоянка под током двигателей постоянного тока шахтных подъемных машин допускается при номинальном токе - в течение 2 мин, при токе 25% от номинального - 5 мин.
Цель изобретения - повышение чувствительности защиты при работе двигателя на упор.
Для достижения этой цели устройство для защиты двигателя постоянного тока от перегрузки, содержащее последовательно соединенные датчик тока, функциональный преобразователь, интегратор и исполнительное реле, к входу которого через стабилитрон токовой отс-ечки подключен выход датчика тока, входом подсоединенного
к измерительному шунту тока в якоре двигателя, а входы питания упомянутых датчика тока, функционального преобразователя, интегратора и исполнительного реле подключены к минусовой шине питания, дополнительно снабжено индикатором скорости двигателя, выполненным из последовательно соединенных тахогенератора, выпрямителя, пелинейного усилителя и инвертора. При этом выходы упомянутых нелинейного усилителя и инвертора подключены к функциональному преобразователю, выполненному с автоматически перестраиваемой характеристикой вход-выход, вход питания индикатора скорости двигателя подсоединен также к минусовой шине питания. Его стабилитроны, используемые для кусочно-линейной аппроксимации, включены в обш,ую цепь прямого канала регулирования и обратных связей, каждая из «оторых содержит последовательно соединенные резистор и диод, причем выход нелинейного усилителя индикатора скорости двигателя подключен к основному входу функционального преобразователя, а выход инвертора через стабилитрон - к обратным связям функционального преобразователя в точках, ЯВЛЯЮШ.ИХСЯ общими для резисторов и диодов.
В результате при работе двигателя на упор ряд обратных связей функционального преобразователя оказывается отключенным благодаря действию сигнала, поступаюш;его с выхода инвертора, а при враш ении -двигателя фувкциональиый преобразователь нечувствителен к токам, меньшим номинального, благодаря действию сигнала с выхода нелинейного усилителя. Это позволяет в своей совокупности при работе двигателя на упор существенно повысить чувствительность функционального преобразователя и соответственно защиты в целом к току якоря двигателя.
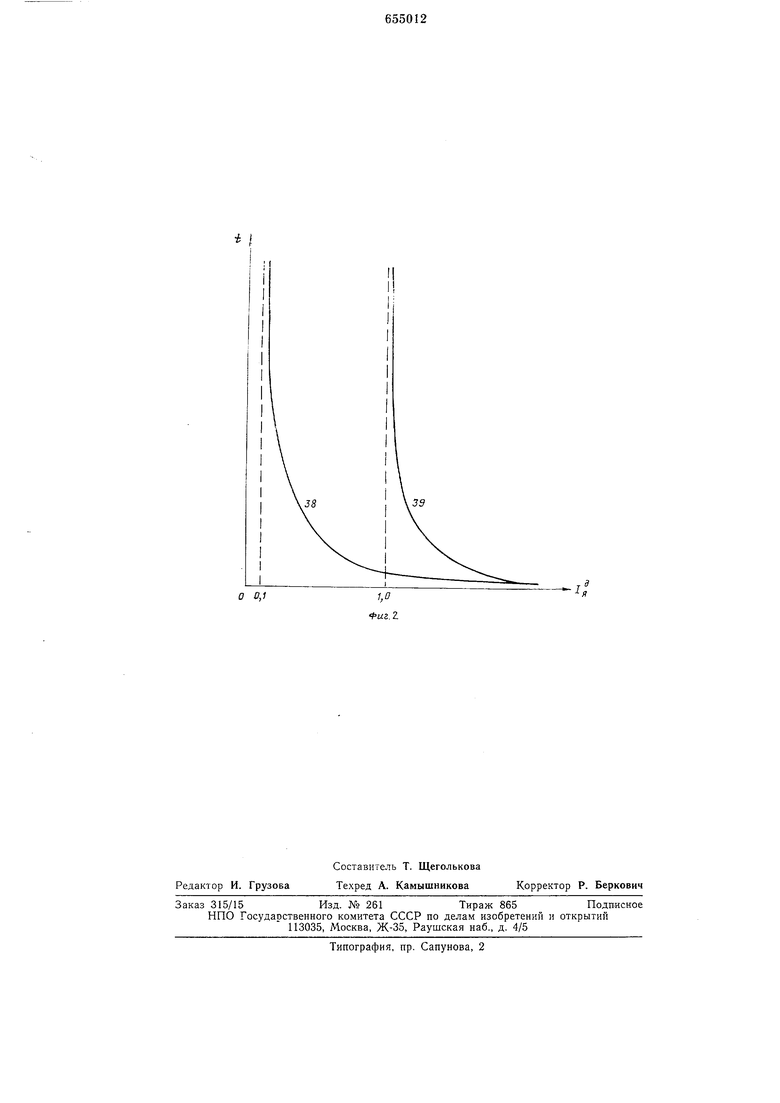
На фиг. 1 приведена схема устройства; на фиг. 2 - примерные зависимости выдержек времени от тока якоря двигателя для режимов стоянки (т. е. работы на упор) и вращения.
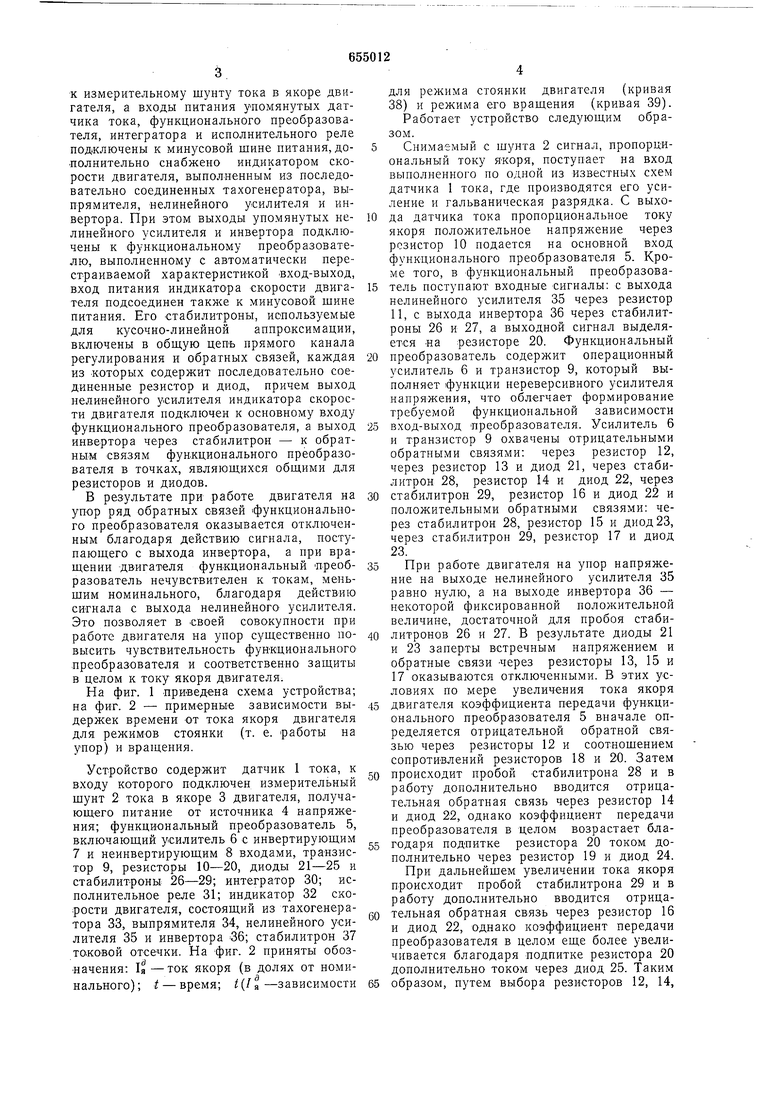
Устройство содержит датчик 1 тока, к входу которого подключен измерительный шунт 2 тока в якоре 3 двигателя, получающего питание от источника 4 напряжения; функциональный преобразователь 5, включающий усилитель 6 с инвертирующим 7 и неинвертирующим 8 входами, транзистор 9, резисторы 10-20, диоды 21-25 и стабилитроны 26-29; интегратор 30; исполнительное реле 31; индикатор 32 скорости двигателя, состоящий из тахогенератора 33, выпрямителя 34, нелинейного усилителя 35 и инвертора 36; стабилитрон 37 ТО.КОВОЙ отсечки. На фиг. 2 приняты обозначения: 1я-ТОК якоря (в долях от номинального); t - время; 1{1я-зависимости
для режима стоянки двигателя (кривая 38) и режима его вращения (кривая 39). Работает устройство следующим образом.
Снимаемый с шунта 2 сигнал, пропорциональный току я-коря, поступает на вход выполненного по одной из известных схем датчика 1 тока, где производятся его усиление и гальваническая разрядка. С выхода датчика тока пропорциональное току якоря положительное напряжение через резистор 10 подается на основной вход функционального преобразователя 5. Кроме того, в функциональный преобразователь поступают входные сигналы: с выхода нелинейного усилителя 35 через резистор И, с выхода инвертора 36 через стабилитроны 26 и 27, а выходной сигнал выделяется на резисторе 20. Функциональный
преобразователь содержит операционный усилитель 6 и транзистор 9, который выполняет функции нереверсивного усилителя напряжения, что облегчает формирование требуемой функциональной зависимости
вход-выход Преобразователя. Усилитель 6 и транзистор 9 охвачены отрицательными обратными связями: через резистор 12, через резистор 13 и диод 21, через стабилитрон 28, резистор 14 и диод 22, через
стабилитрон 29, резистор 16 и диод 22 и положительными обратными связями: через стабилитрон 28, резистор 15 и диод 23, через стабилитрон 29, резистор 17 и диод 23.
При работе двигателя на упор напряжение на выходе нелинейного усилителя 35 равно нулю, а на выходе инвертора 36 - некоторой фиксированной положительной величине, достаточной для пробоя стабилитронов 26 и 27. В результате диоды 21 и 23 заперты встречным напряжением и обратные связи -через резисторы 13, 15 и 17 оказываются отключенными. В этих условиях по мере увеличения тока якоря
двигателя коэффициента передачи функционального преобразователя 5 вначале определяется отрицательной обратной связью через резисторы 12 и соотношением сопротивлений резисторов 18 и 20. Затем
происходит пробой стабилитрона 28 и в работу дополнительно вводится отрицательная обратная связь через резистор 14 и диод 22, однако коэффициент передачи преобразователя в целом возрастает благодаря подпитке резистора 20 током дополнительно через резистор 19 и диод 24. При дальнейшем увеличении тока якоря происходит пробой стабилитрона 29 и в работу дополнительно вводится отрицательная обратная связь через резистор 16 и диод 22, однако коэффициент передачи преобразователя в целом еще более увеличивается благодаря подпитке резистора 20 дополнительно током через диод 25. Таким
образом, путем выбора резисторов 12, 14,
16, 18, 19, 20 и стабилитронов 28 и 29 ос ществляется аппроксимация требуемой функциональной зависимости ломаной линией, состоящей из трех прямолинейных отрезков, что вполне удовлетворяет предъявляемым требованиям.
При необходимости.точность аппроксимации может быть повышена, если вместо двух стабилитронов 28 и 29 применить три стабилитрона и более. Включение указанных стабилитронов в общую цепь прямого Канала регулирования и обратных связей функционального преобразователя позволяет существенно расщирить диапазон выдержек времени защиты при относительно небольщом напряжении коллектора транзистора 9.
Когда двигатель вращается, напряжение тахогенератора 33 чеоез выпрямитель 34 поступает на вход нелинейного усилителя 35 и на его выходе устанавливается положительное напряжение фиксированной величины, а напряжение на выходе инвертооа 36 обращается в нуль. Резистор 11 выбирается таким образом, чтобы поступающий через него на вход усилителя 6 сигнал при номинальном токе якоря 3 был равен сигналу с выхода датчика тока. Поэтому наПряжение на выходе функционального преобразователя появляется только при возрастании тока якоря сверх номинального значения. Та-к как обратные связи через диоды 21 и 23 функционируют, то с их помощью оказывается возможным осуществить аппроксимацию требуемой для режима вращения функции независимо от того, какой вид имеет функция, аппроксимированная для режима работы на упор.
По мере возрастания тока якоря коэффициент передачи функционального преобразователя на первом аппроксимирующей ломаной линии определяется совместным действием обратных связей через резистор 12 и последовательно соединенные резистор 13 и диод 21. Поэтому независимо от сопротивления резистора 12, опоеделяюп1его коэффициент передачи преобразователя для режима работы на упор, необходимый коэффициент передачи для режима вращения может быть получен за счет выбора только резистора 13. После пробоя стабилитрона 28 (т. е. на втором отрезке ломаной линии) в работу дополнительно вводится также обратная связь через резистор 14 и диод 22, функционирующая и прИ работе на упор, и обратная связь через резистор 15 и диод 23, функционирующая только при вращении двигателя. Необходимый коэффициент передачи на этом отрезке для режима вращения двигателя устанавливается резистором 15, и поэтому уже выбранный с помощью резистора 14 коэффициент передачи для режима работы на упор также не нарущается. Аналогичная картина имеет место и после пробоя стабилитрона 29 (т. е. на третьем отрезке ломаной линии), так как и в этом случае в работу вводятся сразу
две обратных связи; через резистор 16 и
диод 22 и через резистор 17 и диод 23,
причем последняя фз нкционирует только
при вращении дв.игателя.
Снимаемый с резистора 20 выходной сигнал функционального преобразователя поступает на вход интегратора 30, выполненного по одной из известных схем. Сигнал на выходе интегратора возрастает во времени с интенстшностью, пропорциональной
ВХОДНОМУ сигналу. Когда выходной сигнал интегратора достигает заданной величины, срабатывает исполнительное реле 31 и через источник 4 напряжения подается команда на снятие перегрузки двигателя.
В устройстве предусмотрена также токовдя отсечка, выполненная на стабилитроне 37. Если ток якоря двигателя достигает величины, ПРИ которой защита должна срабатывать мгновенно, то стабилитрон 37пробивается и сигна.л с выхода датчика 1 тока проходит на вход исполнительного реле 31, МИНУЯ функциональный преобразователь 5 и интегратор 30.
Примерные характеристики 38 и 39 устройства защиты, реализующие требуемые функциональные зависимости f(fy), приведены применительно к условиям работы щахтной подъемной установки. Если подъемкая мащина застопорена механическим тормозом и отсутствует сигнал задания на движение, то система авторегулирования должна поддерживать в цепи якоря двигателя практически нулевое значение тока,
смдественное отклонение от которого может произойти только при каких-либо неполпдках в системе (например, При неисправности схемы гащ«ния напряжения генератора в системе генератор-двигатель).
На автоматизированной подъемной установке, где отсутствует визуальный контроль за состоянием системы со стороны мя.щиниста, подобная неисправность может оставаться не обнаруженной в течение длительного времени. Поэтому для режима стоянки согласно характеристики 38 отсчет выдержки времени начинается уже ПРИ токах, составляющих, например, около 10% от номинального. На многих подъемных установках мащинист для предотврапгения поворота барабана в обратную сторону под действием статической неуравновешенности должен вначале создать достаточный двигательный момент и лишь после
этого ПРОИЗВОДИТЬ растормаживание мащины. Так как в этих условиях осуществить точное дозирование необходимой величины двигательного момента затруднительно, то для режима стоянки согласно характеристики 38 допускается протекание тока якоря, значительно превышающего номинальный, в течение небольшого промежутка времени, например, порядка 2-3 с, необходимого для растормяживания машины. В результате характеристика 38 приобретает в целом вид, близкий к гиперболе. Для режима вращения отсчет выдержки времени -согласно характеристики 39 начинается при токах выще номинального.
Таким образом, выполнение функпионального преобразователя с автоматически перестраиваемой по команде индикатора скорости двигателя характеристикой вход-выход позволяет существенно повысить чувствительность защиты при работе двигателя на упор.
Формула и 3 о б р е т е н и я
Устройство для защиты двигателя постоянного тока от перегрузки, содержащее последовательно соединенные датчик тока, функциональный преобразователь, интегратор и исполнительное реле, к входу которого через стабилитрон токовой отсечки подключен выход датчика тока, вход которого подключен к измерительному шунту тока в якоре двигателя, а входы литания упомянутых датчика тока, функционального преобразователя, интегратора и испол
нительного реле подключены к минусовой шине питания, отличаюшееся тем, что, с целью повышения чувствительности защиты при работе двигателя на упор, оно дополнительно снабжено индикатором скорости двигателя, выполненным из последовательно соединенных тахогенератора, выпрямителя, нелинейного усилителя и инвертора, причем выходы упомянутых нелинейного усилителя и инвертора подключены к
функциональному преобразователю, выполненному с автоматически перестраиваемой характеристикой вход-выход, а вход питания индикатора скорости двигателя подключен также к минусовой шине питания.
Источники информации,
принятые во внимание при экспертизе I Авторское свидетельство СССР № 399955, Н 02 Н 7/08, 1974.
2. Патент Франции № 2277513, Н 02 Н
7/085, опублик. 1973.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования тока якоря электродвигателя | 1979 |
|
SU860247A2 |
| Устройство для защиты электродвигателя от перегрузки | 1982 |
|
SU1043783A1 |
| Устройство для защиты тиристорного электропривода | 1980 |
|
SU976824A1 |
| Устройство для защиты трехфазного электродвигателя от перегрузки и обрыва фазы | 1987 |
|
SU1534608A1 |
| Устройство для защиты асинхронного двигателя от анормального режима | 1981 |
|
SU1020911A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Устройство для контроля пламени | 1983 |
|
SU1129467A1 |
| Регулятор частоты для электроагрегатов переменного тока | 1969 |
|
SU443450A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ В РАБОЧЕЙ КАМЕРЕ УСТРОЙСТВА ДЛЯ ПРОИЗВОДСТВА ВЗОРВАННОГО ЗЕРНА | 1998 |
|
RU2147139C1 |
| Устройство для тепловой защиты полупроводниковых вентилей | 1983 |
|
SU1136248A1 |
Я 2.7 г/
Jff М
:30
,,т/
47J-CO
о 0,1
