Изобретение относится, к электротехнике и может применяться в электроприводах с требованиями к точности стабилизации скорости в условиях удар ных нагрузок, например, в многодвигательных электроприводах клетей непрерывных прокатных, трубопрокатных станов и т.п. агрегатов, имеющих экономическую схему питания от группового источника и индивидуальные возбудители.
Целью изобретения является повышение быстродействия и точности стабилизации скорости при переменных ударных нагрузках.
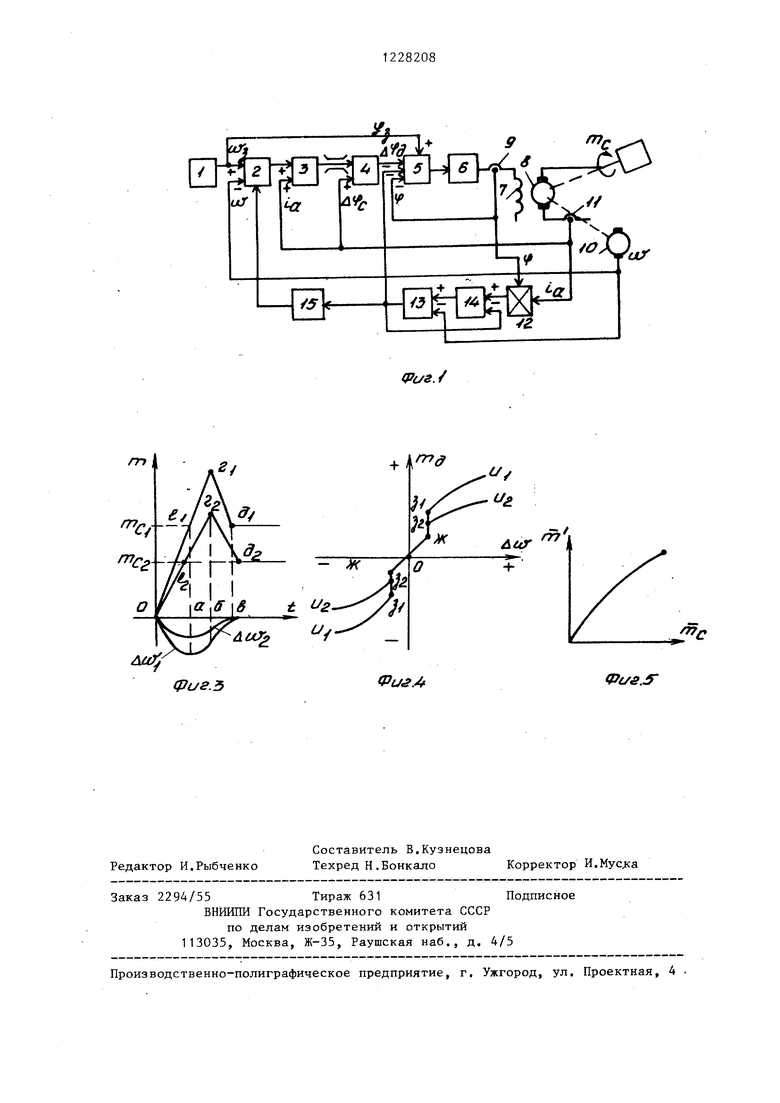
На фиг.1 приведена функциональная схема электропривода; на фиг.2 - функциональная схема системы управления электроприводомI на фиг.З - временные диаграммы момента нагрузки и скорости двигателя; на фиг,4 - диаграммы, поясняющие работу регулятора скорости; на фиг,5 - характеристика функционального преобразователя.
Электропривод (фиг,1) содержит последовательно соединенные задатчик 1 скорости, регулятор 2 скорости, инвертор 3 с ограничением, регулятор 4 тока якоря, регулятор 5 потока возбуждения и возбудитель 6, выход которого подключен к обмотке 7.возбуждения электродвигателя 8, якорь которого подключен к источнику стабильного напряжения (не показан),, к которому могут быть подключены и другие электродвигатели. Датчики 9 потока возбуждения и 10 скорости соединены своими выходами с вторыми входами регулятора 5 потока возбуждения и регулятора 2 скорости соответственно.
Датчик 11 тока якоря соединен с вторыми входами инвертора 3 с ограничением и регулятора 4 тока якоря, а также С первым входом блока 12 перемножения, к второму входу которого подключен выход датчика 9 потока возбуждения. К третьему входу регулятора 5 потока возбуждения подключен .выход усилителя 13, к входам которого подключены выход интегратора 14 и датчик 10 скорости, К четвертому входу регулятора 5 потока возбуждения подключен задатчик 1 скорости, К входам интегратора 14 подключены выходы блока 1.2 перемножения и усилителя 13. Якорь двигателя 8 приводит во вращение механизм, момент нагрузки т. которого может изменяться по величине и
282082
прикладываться скачкообразно (например,, при входе металла в валки прокатного стана).
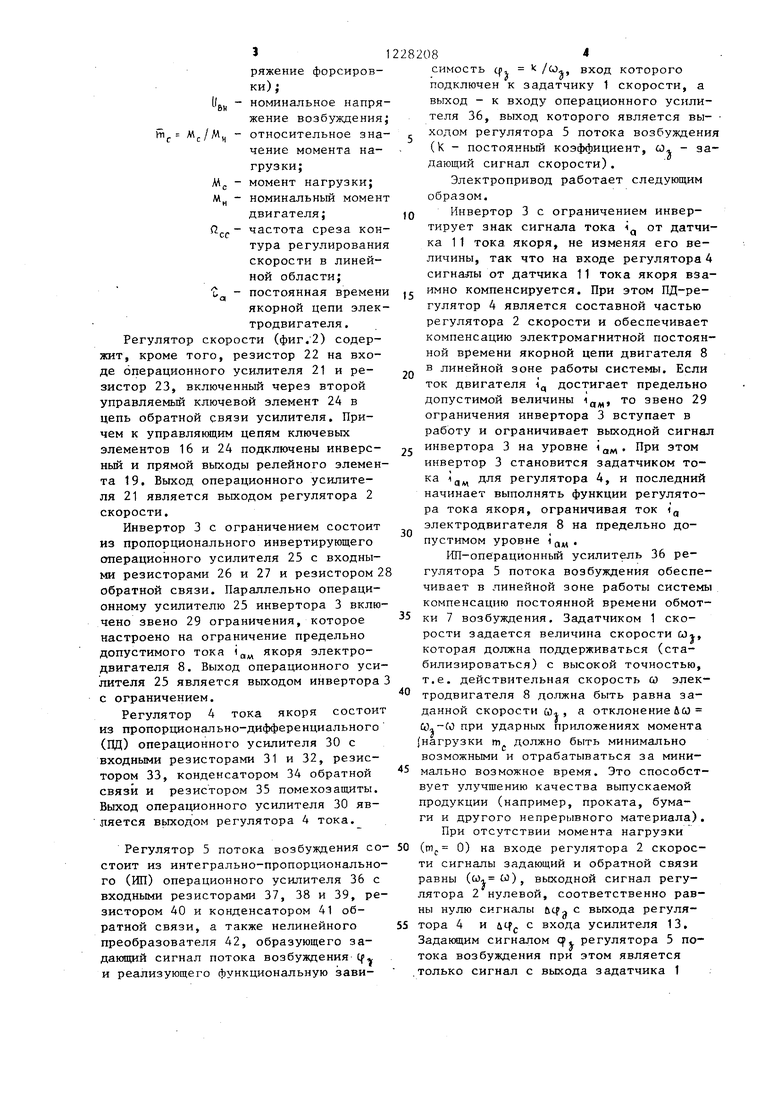
В электропривод введен (фиг,2)
5 функциональный преобразователь 15, управляемый ключевой элемент 16,блок 17 перемножения, нелинейный резистор 18 и релейный элемент 19, а регулятор 2 скорости содержит последова0 тельно соединенные сумматор 20 и операционный усилитель 21, при этом уп- равляемьй ключевой элемент 16, блок 17 перемножения и нелинейный резистор 18 соединены последовательно и в ключены
15 в цепь обратной связи операционного усилителя 21 регулятора 2 скорости, цепь управления ключевого элемента 16 соединена с выходом релейного элемента 19 вход которого подключен к ходу сумматора 20 регулятора 2 скорости, а второй вход блока 17 перемножения связа.н с выходом функционального преобразователя 15, реализующего зависимость
.,
-sUBvv
2 «-со V
1 .Сзив«
гп.
о
5
5
0
5
где
и„..--и
8М
hi - производная момента электродвигателя в относительных единицах, ;
( р.иР) конструктивная постоянная электродвигателя;
Тц - среднее значение постоянной времени цепи возбуждения электродвигателя при нормальном значении тока возбужд.ения;
-относительное соп- рдтивление цепи
якоря электродвигателя;
1 - номинальный ток якоря;
R - сопротивление якорной цепи;
Е - нормальная ЭДС
н
электродвигателя; относительное максимальное напряже- ; ние возбуждения;
-максимально возможное напряжение возбуждения (напЙ макс
3
ряжение форсиров- ки);
llg - номинальное напряжение возбуждения irif - относительное значение момента нагрузки;
Мд - момент нагрузки; м - номинальный момен
двигателя;
, - частота среза контура регулировани скорости в линейной области; и - постоянная времен якорной цепи электродвигателя.
Регулятор скорости (фиг.2) содержит, кроме того, резистор 22 на входе операционного усилителя 21 и резистор 23, включенный через второй управляемый ключевой элемент 24 в цепь обратной связи усилителя. Причем к управлянмцим цепям ключевых элементов 16 и 24 подключены инверс- ньй и прямой выходы релейного элемента 19. Выход операционного усилителя 21 является выходом регулятора 2 скорости.
Инвертор 3 с ограничением состоит из пропорционального инвертирующего операционного усилителя 25 с входными резисторами 26 и 27 и резистором 2 обратной связи. Параллельно операционному усилителю 25 инвертора 3 включено звено 29 ограничения, которое настроено на ограничение предельно допустимого тока (д„ якоря электродвигателя 8. Выход операционного усилителя 25 является выходом инвертора с ограничением.
Регулятор 4 тока якоря состоит из пропорционально-дифференциального (ПД) операционного усилителя 30 с входными резисторами 31 и 32, резистором 33, конденсатором 34 обратной связи и резистором 35 помехозащиты. Выход операционного усилителя 30 является вьгходом регулятора 4 тока.
Регулятор 5 потока возбуждения состоит из интегрально-пропорционального (ИП) операционного усилителя 36 с входными резисторами 37, 38 и 39, резистором 40 и конденсатором 41 обратной связи, а также нелинейного преобразователя 42, образующего задающий сигнал потока возбуждения (j и реализующего функциональную зави28208Л
симость (-i. - TI вход которого подключен к задатчику 1 скорости, а выход - к входу операционного усилителя 36, выход которого является вы- ходом регулятора 5 потока возбуждения (К - постоянный коэффициент, о, - задающий сигнал скорости).
Электропривод работает следующим образом.
)0 Инвертор 3 с ограничением инвертирует знак сигнала тока i от датчика 11 тока якоря, не изменяя его величины, так что на входе регулятора 4 сигналы от датчика 11 тока якоря вза- JJ имно компенсируется. При этом ПД-ре- гулятор 4 является составной частью регулятора 2 скорости и обеспечивает компенсацию электромагнитной постоянной времени якорной цепи двигателя 8 в линейной зоне работы системы. Если ток двигателя ( достигает предельно допустимой величины 1д, то звено 29 ограничения инвертора 3 вступает в работу и ограничивает выходной сигнал 25 инвертора 3 на уровне ia. При зтом инвертор 3 становится задатчиком тока ig для регулятора 4, и последний начинает выполнять функции регулятора тока якоря, ограничивая ток I g электродвигателя В на предельно допустимом уровне i аи
ИИ-операционный усилитель 36 регулятора 5 потока возбуждения обеспечивает в линейной зоне работы системы компенсацию постоянной времени обмот- 5 ки 7 возбуждения. Задатчиком 1 скорости задается величина скорости coj, которая должна поддерживаться (стабилизироваться) с высокой точностью, т.е. действительная скорость со элек- тродвигателя 8 должна быть равна заданной скорости со , а отклонение Ло) при ударных приложениях момента (нагрузки т должно быть минимально возможными и отрабатываться за мини- 5 мально возможное время. Это способствует улучшению качества выпускаемой продукции (например, проката, бумаги и другого непрерывного материала).
При отсутствии момента нагрузки 0 (т 0) на входе регулятора 2 скорости сигналы задающий и обратной связи равны (а).. ы), выходной сигнал регулятора 2 нулевой, соответственно равны нулю сигналы uq с выхода регуля- 5 тора 4 и atf с входа усилителя 13. Задающим сигналом ср. регулятора 5 потока возбуждения при этом является .только сигнал с выхода задатчика 1
30
скорости, пропущенный через нелинейный преобразователь 42 регулятора 5, Заданное значение потока возбуждения составляет
tp e/cco.j,
где е - ЭДС двигателя 8;
с - постоянная электродвигателя 8;
При регулировании скорости изменением потока возбузкдения qj ЭДС е поддерживается постоянной (при т(.0). Поэтому нелинейный преобразователь 42 реализует функциональную зависимость
Я
К/СдЗ
г
При наличии момента нагрузки т заданное значение потока возбуждения ipi в установившемся режиме должно быть уменьшено на величину Л0 (в относительных единицах, где - относительная постоянная величина сопротивления цепи якоря двигателя 8), чтобы скорость и не изменилась, т.е. осталось неизменным равенство СО СОу Сигнал щ получается с помощью усилителя 13, который вместе с интегратором 14 образует
контур, функционирующий согласно уравнению
Р -и
(т-и,
П) 35
е KIJ , 11,3 коэффициент усиления
и выходной сигнал усилителя 13;40 - выходной сигнал блока 12 перемножения, пропорциональный электромагнитному моменту электродвигателя В; 45 Т - постоянная времени интегратора 14; /p - символ интегрирования,
Из уравнения (1) легко получить 50
вьфажения (2) станет равным величине
статического мойента т.
т.к.
т- m-pjGO,
(.-6)
где р - CHMBOJ дифференцирования.
Выражение (2) при этом можно записать в виде
fnи
ирЧ,|,3
(Ч)
т.е. сигнал на выходе усилителя 13 пропорционален моменту тп.
При отсутствии момента нагрузки (Шр 0) и, О, т.е. выходной сигнал ус:илителя 13 также равен нулю. Сигнал ера получается на входе регулятора 5 потока возбуждения соответствующим выбором входного резистора 39 регулятора 5 по входу усилителя 1 3.
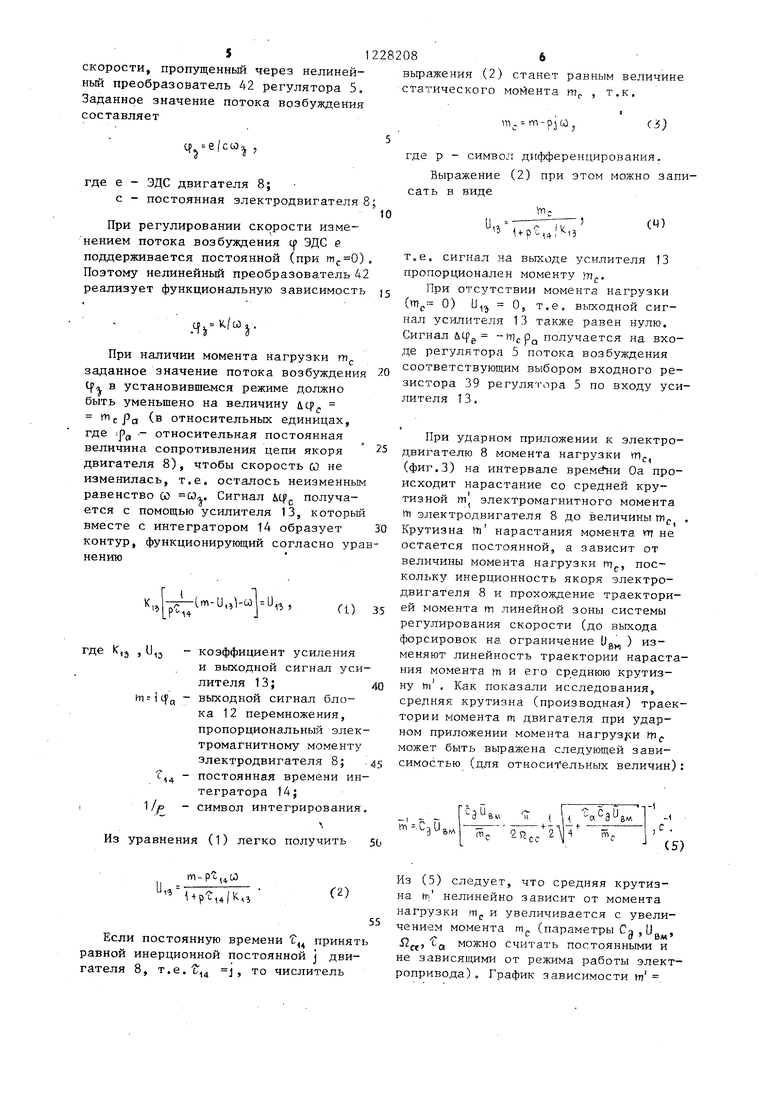
При ударном приложении к электродвигателю В момента нагрузки т (фиг.З) на интервале времени Оа происходит нарастание со средней крутизной т электромагнитного момента tn электродвигателя 8 до величины тп, . Крутизна 17) нарастания момента vn не остается постоянной, а зависит от величины момента нагрузки т, поскольку инерционность якоря электро- двих ателя 8 и прохождение траекторией MOMfiHTa m линейной зоны системы регулирования скорости (до выхода форсировок на ограничение Ug ) изменяют линейность траектории нарастания момента m и его среднюю крутизну П| , Как показали исследования, средняя: крутизна (производная) траектории момента m двигателя при ударном приложении момента нагруз; и (. может быть выражена следующей зависимостью (для относительных величин):
,
tn-pt,co Upt,4|Ke
(2)
Если постоянную времени l принять равной инерционной постоянной j двигателя 8, т.е. о j , то числитель
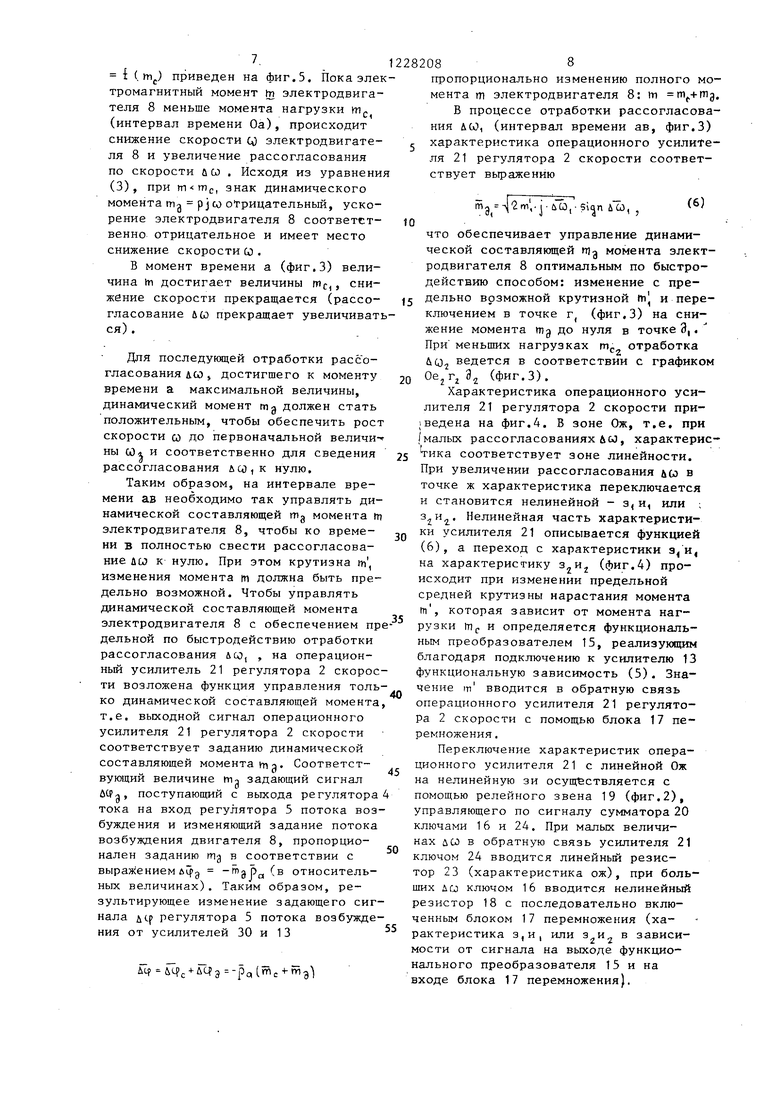
Из (5) следует, что средняя крутизна tT; нелинейно зависит от момента нагрузки гпр и увеличивается с увеличением момента mf, (параметры Cg , U, tg можно считать постоянными и не зависящими от режима работы электропривода) , График зависимости т
i (m) приведен на фиг.5. Пока электромагнитный момент (Т) электродвигателя 8 меньше момента нагрузки т (интервал времени Оа), происходит снижение скорости СО электродвигате- ля 8 и увеличение рассогласования по скорости а со . Исходя из уравнения (3), при , знак динамического момента trig р j со отрицательный, ускорение электродвигателя 8 соответст- венно отрицательное и имеет место снижение скорости СО .
В момент времени а (фиг.З) величина tn достигает величины Шс,, снижение скорости прекращается (рассогласование UW прекращает увеличиваться) .
Для последующей отработки расс о- гласования лсо, достигшего к моменту времени а максимальной величины, динамический момент гпд должен стать положительным, чтобы обеспечить рост скорости со до первоначальной величи- ны cOi и соответственно для сведения рассогласования йс,к нулю.
Таким образом, на интервале времени ав необходимо так управлять динамической составляющей ггд момента tn электродвигателя 8, чтобы ко времени в полностью свести рассогласование UCO к нулю. При этом крутизна т , изменения момента m должна быть предельно возможной. Чтобы управлять динамической составляющей момента электродвигателя 8 с обеспечением прдельной по быстродействию отработки
рассогласования л со,
на операционный усилитель 21 регулятора 2 скорости возложена функция управления только динамической составляющей момента, т.е. вькодной сигнал операционного усилителя 21 регулятора 2 скорости соответствует заданию динамической составляющей момента trig. Соответствующий величине гпт задающий сигнал йСУд, поступающий с выхода регулятора тока на вход регулятора 5 потока возбуждения и изменяющий задание потока возбуждения двигателя 8, пропорционален заданию mg в соответствии с выражением лСрд зР относительных величинах). Таким образом, результирующее изменение задающего сигнала utp регулятора 5 потока возбуждения от усилителей 30 и 13
лх &1р -I-rqi э -pq Г1 с-1-f э1
208о
пропорционально изменению полного момента m электродвигателя 8: tri , В процессе отработки рассогласования дсо, (интервал времени ав, фиг.З) характеристика операционного усилителя 21 регулятора 2 скорости соответствует выражению
т,,
. 0(
Ii- - - -
.т,.у йСО,- 5iijn iCJ, j
, ю
25
20
J-2
,
30
5
0
5
0
5
что обеспечивает управление динамической составляющей trig момента электродвигателя 8 оптимальным по быстродействию способом: изменение с пре- 5 дельно возможной крутизной т и переключением в точке г, (фиг.З) на снижение момента mg до нуля в точке 9,. При меньших нагрузках т отработка Л у,, ведется в соответствии с графиком
д (фиг.З).
Характеристика операционного усилителя 21 регулятора 2 скорости при- ;ведена на фиг.4. Б зоне Ож, т.е. при /малых рассогласованиях ioj, характеристика соответствует зоне линейности. При увеличении рассогласования йсо в точке ж характеристика переключается и становится нелинейной - з, и, или ; . Нелинейная часть характеристики усилителя 21 описывается функцией (6), а переход с характеристики , на характеристику (фиг.4) происходит при изменении предельной средней крутизны нарастания момента tTi , которая зависит от момента нагрузки гпс и определяется функциональ- ньпч преобразователем 15, реализующим благодаря подключению к усилителю 13 функциональную зависимость (5). Значение 1т| вводится в обратную связь операционного усилителя 21 регулятора 2 скорости с помощью блока 17 перемножения .
Переключение характеристик операционного усилителя 21 с линейной Ож на нелинейную зи осуществляется с помощью релейного звена 19 (фиг.2), управляющего по сигналу сумматора 20 ключами 16 и 24. При малых величинах йсо в обратную связь усилителя 21 ключом 24 вводится линейный резистор 23 (характеристика ож), при больших до ключом 16 вводится нелинейный резистор 18 с последовательно включенным блоком 17 перемножения (хаэ.и
в зависирактеристика з,и, или мости от сигнала на выходе функционального преобразователя 15 и на входе блока 17 перемножения).
91
Благодаря переключениям характеристики операционного усилителя 21 с линейной (ож) на нелинейную (зи) обеспечивается предельная по быстродействию отработка ударных воздействий нагрузки njp . При переключении на нелинейную характеристику зи в зоне больших рассогласований и со благодаря изменениям характеристики операционного усилителя 21 , или з,и (фиг.4) - обеспечивается оптимальная по быстродействию настройка регулятора скорости соответственно изменившемуся значению ударной нагрузки т,, исключаются перерегулирования при отработке рассогласований iU, соответственно повышается быстродействие и точность стабилизации скорости электропривода при переменных ударных нагрузках.
Формула из обретения
Электропривод постоянного тока по авт.св. № 1115188, о т л ич а ю- щ и и с я тем, что, с целью повы- .шения быстродействия и точности ста- (билизации скорости при.переменных ударных нагрузках, в него введены функциональный преобразователь, управляемый ключевой элемент, блок перемножения, нелинейный резистор и релейный элемент, а регулятор скорости содержит последовательно соединенные сумматор и операционный усилитель, при этом управляемый ключевой элемент, блок перемножения и нелинейный резистор соединены последовательно и включены в цепь обратной связи операционного усилителя регулятора скорости, цепь управления ключевого элемента соединена с выходом релейного элемента, вход которого подключен к выходу сумматора регулятора скорости, а второй вход блока перемножения связан с выходом функционального преобразователя, реализующего зависимость
CgU
Вм
т.
20сс 2
Л . л 11.
а Эивм
где
т
НО
15
0
5
0
5
0
5
Г Киру
.1иК.й
ЕЙ
и.м и,
макг
/ «„Ufc
макс
и..
т, м,/М,
м. 57
ее
с -производная момента электродвигателя в относительных еди- ицax, ;
-конструктивная постоянная электродвигателя;
среднее значение постоянной времени цепи возбуждения электродвигателя при номинальном значении тока возбуждения; относительное сопротивление цепи якоря электродвигателя; номинальный ток якоря;
сопротивление якорной цепи; номинальная ЭДС электродвигателя; относительное максимальное напряжение возбуждения; максимально возможное напряжение возбуждения (напряжение форсировки); номинальное напряжение возбуждения; относительное значение момента нагрузки;
момент нагрузки; номинальный момент двигателя} частота среза контура регулирования скорости в линейной области;
постоянная времени якорной цепи электродвигателя.
Риг./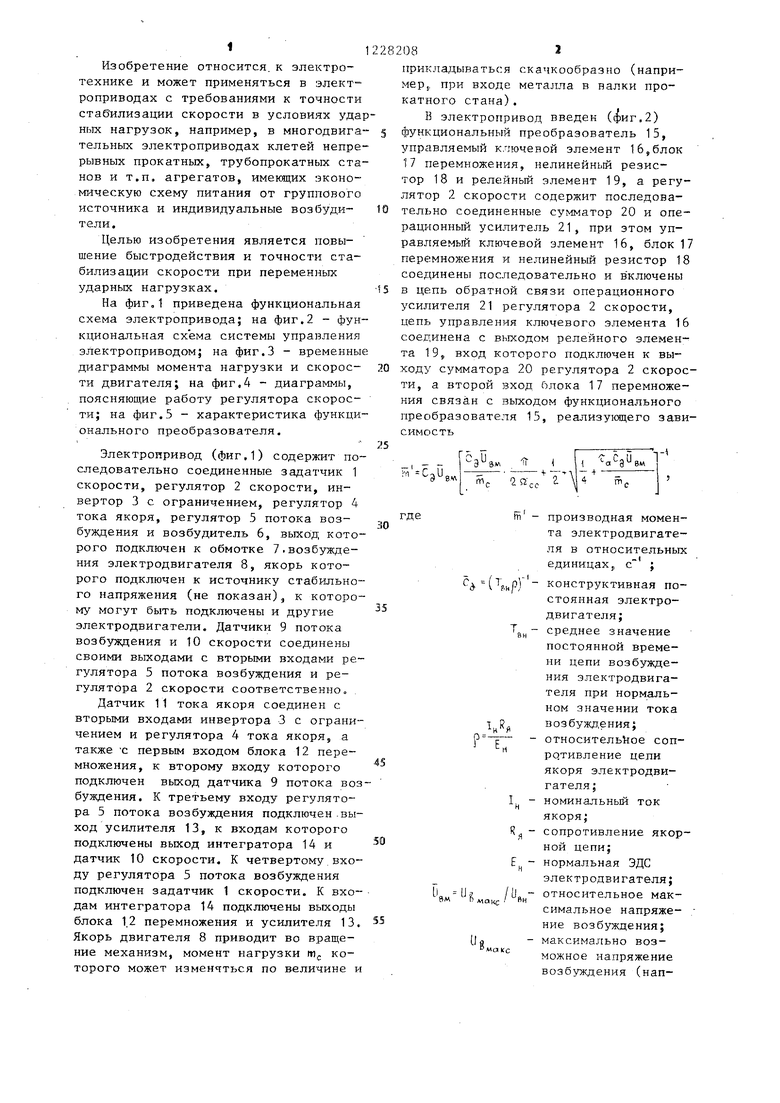

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для управления электроприводом постоянного тока | 1978 |
|
SU736320A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Электропривод постоянного тока | 1984 |
|
SU1264286A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Устройство для управления электроприводом постоянного тока, выполненное по принципу двухзонного регулирования | 1979 |
|
SU938354A1 |
Изобретение может применяться в электроприводах с требованиями к точности стабилизации скорооти в условиях ударных нагрузок. Целью изобретения является повьшение быстродействия и точности стабилизации скорости. В электропривод введен функциональньм преобразователь 15, управляемый ключевой элемент 16, блок перемножения 17, нелинейный резистор 18 и релейный элемент (РЭ) 19. Регулятор .скорости (PC) 2 содержит сумматор 20 и операционньш усилитель (СУ) 21.Характеристика ОУ 21 PC 2,при малых рассогласованиях соответствующая зоне линейности, при увеличении рассогласования становится нелинейной, что осуществляется с помощью РЭ 19, обеспечивает оптимальную по быстродействию настройку PC 2 соответственно изменившемуся значению ударной нагрузки и исключает перерегулирование при обработке рассогласований. 5 ил. (Л 11 5/L у 26 2S -CZh з-« 331 д 27 d S { Фи. 2,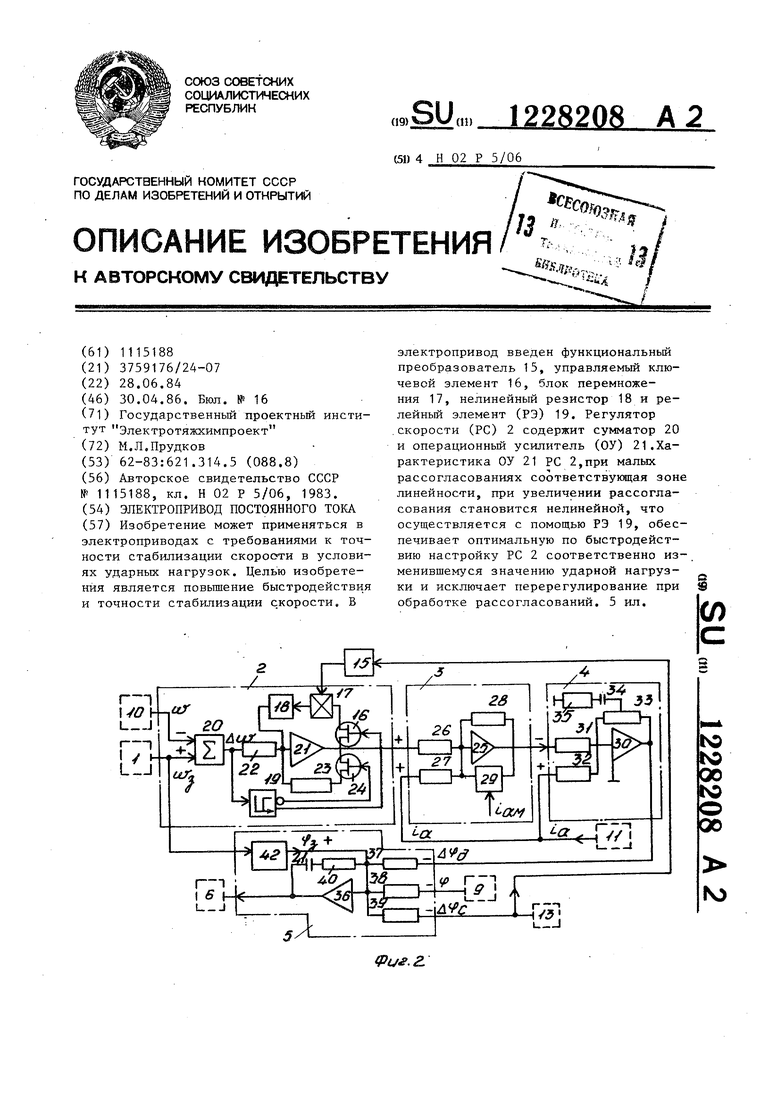
т
ЛглГ
т
тс
Фиг.
Редактор И.Рыбченко
Составитель В.Кузнецова
Техред Н.Бонкало Корректор И.
Заказ 2294/55Тираж 631Подписное
ВНЙРШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fPu.
e/s.S
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
