метрально противостоящих ферромагнит(ных сердечников С-образной формы с С-обраэнУми полюсами, обращенными своими раб9чими зазорами к контролируе{Л9му валу. Роторы выполнены в виде ферромагнитного диска с буртиками на торцовой поверхности и немагнитного стакана Г-образными ферромагнитными пластинами, закрепленными на поверхности его в радиальных плоскостях равномерно по окружности и установленными одними своими концами в зазоре одного из С-образных полюсов сердечников статора, а другими концами - в зазоре между торцовыми буртиками ферромагнитного диска, край которого расположен в зазоре второго С-образного полюса сердечников статора.
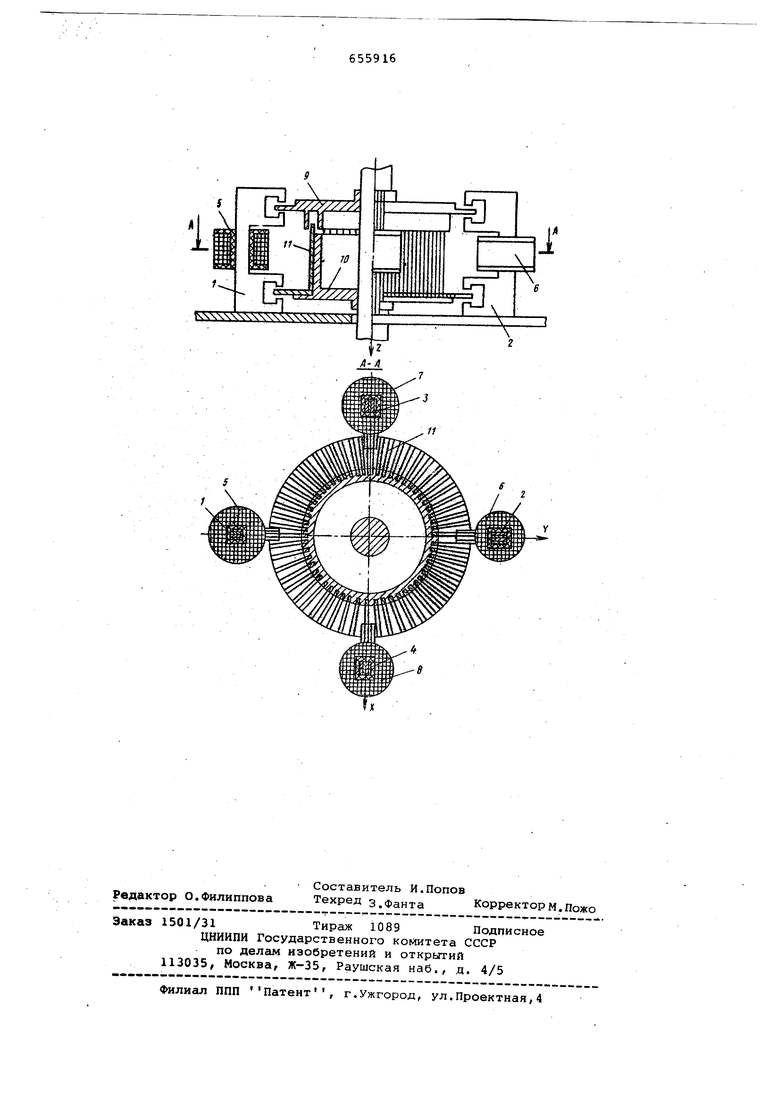
На чертеже представлена конструктивная схема датчика угла изгиба вала несущего винта вертолета.
Устройство для измерения изгибающих сил и моментов включает два индуктивных датчика угла изгиба вала, устанавливаемых соосно на контролируемом валу на некотором расстоянии друг от друга. Выходные цепи датчиков включаются в общую измери: ельную схему, производящую вычисление изгибающих сил и моментов по величине суммарного угла изгиба вала (на контролируемом участке).
Датчики угла изгиба вала однотипные и каждый содержит ротор, жестко закрепляемой на контролируемом валу, и статор. Статор датчика угла изгиба вала содержит две расположенные во взаимно перпендикулярных плоскостях пары ферромагнитных сердечников 1,2 и 3,4 С-образной формы с С-образными (расщепленными полюсами, рабочие зазоры которых обращены к контролируемому валу. Сердечники каждой пары снабжены обмотками 5,6 и 7,8 и установлены по диаметру одни против другого на равных расстояниях от оси вала. Обмотки каждой пары диаметраль но противостоящих сердечников статора включаются, например, в плечи мос товой схемы с активными сопротивлениями в двух других плечах, питаемой переменным током. Выход моста через усилитель подключается к измерительной схеме (На чертеже не показано) . Ротор датчика угла изгиба вала состоит из ферромагнитного диска с буртиками 9 и Немагнитного стакана с фланцем, обособленно и соосно закрепленных на контролируемом валу Высота буртиков одинакова и- значительно превшлает расстояние между ними. в стенках и фланце 10 стакана, по образующей цилиндра и радиусам фланца, равномерно па окружности я симметрично относительно его осевой линии расположены Г-образныс пласти
ны 11 из магннтопроводящего материаа, причем большая ветвь пластины расположены по образующей цилиндра, а меньшая - по радиусу фланца его.
Диск и стакан укреплены на валу аким образом, чтобы ветви пластины 11, расположенные на цилиндрической поверхности стакана 10, входили на незначительную глубину в паз, образованный буртиками 9 диска.
Для уменьшения пульсаций выходного напряжения датчика при вращении контролируемого вала толщина магнитопровода сердечника выбрана в несколько раз больше толщины магнитопроводящих пластин, закрепленных на фланце стакана.
Датчик работает следующим образом.
Магнитная цепь каждого сердечника статора замыкается через воздушные зазоры С-образных полюсов, ветви Гобразных пластин ротора, диск с буртиками 9 ротора и воздуиный зазор в пазу между ветвями Г-образных пластин на цилиндрической поверхности стакана. Магнитное сопротивление этой цепи определяется преимущественно сопротивлением воздушных зазоров между магнитопроводящими элементами атчика. Благодаря С-образной форме полюсов сердечников и выбору их толщины, кратной шагу расстановки пластин 11 на фланце стакана 10 ротора, сопротивления зазоров между ротором и сердечниками статора не зависят от изменения положения частей ротора относительно статора при изгибе вала несущего винта вертолета. В этом случае сопротивление магнитной цепи каждого сердечника статора изменяется линейно, причем только за счет изменения глубины погружения концов пластины 11 стакана 10 ротора в паз межУ буртиками.9 диска ротора. В свою очередь изменение глубины погружения пластин в паз зависит от разности угов поворота сечений вала несущего . винта в плоскостях закрепления диска и стакана ротора, которая является линейной функцией изгибающих сил и моментов, действующих на вгш несущего винта в плоскости установки данной катушки. Соответственно и изменение сопротивления этого воздушного зазора линейно зависит от изгибающих сил и моментов , приложенныгх к валу. По такому же закону изменяется и выходной сигнал датчика. Изгибаиощие силы Р , Ру и моменты MX, My вычисляются измерительной схемой по алкоритмам р gEItCEAa- gfla) Ц - Ug (еу - ) (){еде-ев2)-{ед г-Е|е)(,) 2ElK-gtlUc-U(e|e-Bg,) к«с(е|,-8|,)(еАг-ева)-(е1г-е1г еА1-Рв,)
р 2Hl U3 e a-gB2)-U4(e i-EBi)
(е,-е|,)(8лг-ав,)-()(ел,-ев,)}
2BiiU2(et-g| - -i(gge-el3 3
/ (е1,-е|,)(ВАгВва)-(ВАГ«в.
где РХ, Ру Mxf My - изгибающие силы и моменты по осям х и у;
Uii Ui, - выходные напряжения первого и второго датчиков в плоскости YOZ;
выходные напряжения первого и второго датчиков изгиба в плоскости XOZ;
расстояние от центра втулки несущего винта до плоскости установки дисков соответственно первого и второго датчиков изгиба вала;
В(/Рве расстояние от втулки , несущего винта до плоскости закрепления дна стаканов соответственно первого и второго датчиков;
И - тарировочный коэффициент (зависит от конструктивных параметров датчика и схемы включения катушек) .
.- - ж- -где Два - углы взаимного поворота сечений первого и второго датчиков в плоскости yOZ;
AQg; углы взаимного поворота сечений первого и второго датчиков в плоскости XOZ.
Формула изобретения
Устройство для измерения изгибающих сил и моментов, действующих на вращающийся вал, содержащее датчик, выполненный в виде статора с ферромагнитными сердечниками, несущими на
себе обмотки, включенные в измерительную схему,и ферромагнитного ротора, жестко связанного с контролируемым BcunoM, отличающееся тем, что, с целью повышения точности измерений за счет исключения влияния деформаций кручения и зазоров в опорах контролируемого вала, в него введен второй идентичный датчик, удаленный от первого вдоль оси вала, при этом статоры обоих датчиков выполнены в виде двух расположенных во взаимно перпендикулярных плоскостях пар диаметрально противостоящих ферромагнитных сердечников С-образной формы с С-обраэными полюсами, обращенными своими рабочими зазорами к контролируемому валу, а роторы выполнены в виде ферромагнитного диска с буртиками на торцовой поверхности и немагнитного стакана с Г-образными феррсялагнитными пластинами, закрепленными на поверхности его в диаметральных плоскостях, равномерно по окружности и установленными одними своими концами в зазоре одного из С-образных полюсов сердечников статора, а другими концами - в зазоре между торцовыми буртиками ферромагнитного диска, край которого расположен в зазоре второго С-образносо полюса сердечников статора.
Источники информации, принятые во внимание при экспертизе
1.Патент США 3201982, кл. 73-136, 1962.
2.Гусев В.Г. и др. Бесконтактные преобразователи для передачи информации с вращающихся объектов на непоПриборы и системы управледвижные
ния, 1974, №10, с. 38-41.
3. Авторское свидетельство СССР №492765, кл. G 01 L 3/10, 1974.
... ТЖ™
11W
Г1
1
у////.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЯМОПРИВОДНОЙ ГЕНЕРАТОР ИЛИ ДВИГАТЕЛЬ ДЛЯ ВЕТРО- ИЛИ ГИДРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ИЛИ СУДНА И СПОСОБ СБОРКИ ТАКОЙ УСТАНОВКИ | 2006 |
|
RU2438041C2 |
| ДАТЧИК ЧИСЛА ОБОРОТОВ | 1992 |
|
RU2010229C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2509665C1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| БЕСКОНТАКТНЫЙ КОГТЕОБРАЗНЫЙ ГЕНЕРАТОР | 2001 |
|
RU2194350C1 |
| ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2289186C2 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2316882C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОДВЕС ВЕРТИКАЛЬНОГО ВАЛА РОТОРА | 2016 |
|
RU2626794C1 |
| БЕСЩЕТОЧНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2006 |
|
RU2388132C2 |
| МАГНИТНО-СИЛОВОЕ РОТАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2371828C1 |
.
//
