Изобретение относится к области измерительной техники, в частности к средствам измерения силовых воздействий на основе упругих элементов. Изобретение может быть использовано для измерения величины крутящего момента на валах.
Из патента РФ №2152600 (опубл. 10.07.2000) известен датчик крутящего момента вала. Датчик содержит торсионный вал, соединяющий части контролируемого вала, на торцах которого установлены дисковые электропроводящие экраны с вырезанными в них окнами, смещающимися друг относительно друга при закрутке торсиона.
На неподвижном относительно контролируемого вала корпусе установлен дисковый каркас с катушками индуктивности, вплотную через антифрикционную прокладку прилегающий к одному из экранов. Электрические выводы катушек проходят через корпус.
При появлении крутящего момента на контролируемом валу происходит скручивание торсиона и механическое перемещение окон одного экрана относительно другого, что приводит к изменению индуктивности катушек, которая и является информационным параметром.
Недостатками датчика являются его конструктивная и технологическая сложность из-за большого числа деталей, необходимость высокоточной сборки для обеспечения параллельности экранов и каркаса катушек индуктивности, наличие трущихся частей (экрана и каркаса катушек), снижающих эксплуатационную надежность датчика.
Другим недостатком датчика является невозможность измерения крутящего момента вала многооборотного привода, ввиду плотного механического контакта неподвижных катушек с одним из перемещающихся вместе с валом экранов. В результате функциональные возможности датчика ограничены, т.к. его можно использовать только в неполнооборотных приводах.
Из патента №2122742 (опубл. 27.11.1998) известен магнитоиндукционный датчик частоты вращения для измерения крутящего момента вращающегося вала. Датчик содержит ферромагнитный зубчатый индуктор, постоянный магнит, магнитопроводящий наконечник на полюсе магнита, обращенном к ферромагнитному зубчатому индуктору. Полюсный наконечник выполнен в виде Ж-образного магнитопровода, на перемычках которого размещены сигнальные обмотки, при этом крайние полюса наконечника размещены над зубьями индуктора, а средний полюс над пазом между зубьями индуктора.
Недостатком датчика является снижение точности измерений при возрастании скорости вращения вала. Это обусловлено тем, что датчик регистрирует сигнал, который представляет собой импульс при каждом прохождении отдельного зубца индуктора перед датчиком. И ввиду того, что перемагничивание зубцов учащается с увеличением скорости вращения вала, возрастает погрешность измерения крутящего момента на больших скоростях вращения вала.
При этом невозможно измерить приложенный крутящий момент при статичном положении вала, ввиду импульсной кривой выходного сигнала. Кроме того, недостатком датчика является сложность его конструкции.
Из патента №2050531 (опубл. 20.12.1995) известно устройство для измерения крутящего момента вращающегося вала. Устройство содержит торсионный вал, в различных сечениях которого установлены зубчатые роторы, выполненные из магнитомягкого материала, магнитоиндукционные датчики, имеющие магнитную связь с индукторами, фазоизмерительный прибор.
Под действием измеряемого крутящего момента упругий вал скручивается, при этом зубчатые индукторы поворачиваются относительно своего первоначального положения. При вращении вала зубчатые индукторы модулируют магнитный поток, который, пересекая витки измерительных обмоток датчиков, индуктирует в них сигналы, близкие по форме к синусоиде.
Недостатком устройства является зависимость точности его измерений от скорости вращения вала. Это обусловлено тем, что каждый магнитоиндукционный датчик имеет собственную отличную от другого амплитудно-частотную характеристику, в результате чего изменение скорости вращения при неизменном моменте приводит к неодинаковому изменению амплитуды двух синусоидальных сигналов, а следовательно, и выходного сигнала магнитоиндукционных датчиков. Зубчатые индукторы фиксируют смещение соответствующих сечений вала под действием нагрузки, что приводит к временному сдвигу двух синусоидальных сигналов относительно друг друга - смещению фазы.
Кроме того, недостатком устройства является зависимость выходного сигнала от консольной изгибающей нагрузки, очень часто имеющей место и приводящей к появлению нерегламентированных радиальных биений зубчатых индукторов относительно магнитоиндукционных датчиков (изменение величины воздушного зазора между датчиком и зубчатым индуктором с частотой вращения вала), что в конечном итоге приводит к погрешности разностного выходного сигнала.
Кроме того, размещение зубчатых индукторов в разных сечениях вала увеличивают осевой габарит устройства и усложняет его конструкцию. Требуются два магнитоиндукционных датчика.
Следующим недостатком является то, что в устройстве не предусмотрено измерение крутящего момента в том случае, когда крутящий момент приложен, а вращение вала отсутствует, что особенно актуально для приводов трубопроводной арматуры при работе запорного органа арматуры на упор. Это ограничивает функциональные возможности устройства.
Задачей изобретения является устранение вышеуказанных недостатков аналогов.
Технический результат изобретения заключается в обеспечении стабильной точности измеряемого крутящего момента.
Техническая задача решается и технический результат достигается за счет того, что устройство измерения крутящего момента вала содержит:
- ротор, включающий внутренний и внешний сердечники, установленные на валу коаксиально друг другу;
- вал, снабженный упругим элементом, обеспечивающим относительное смещение внутреннего и внешнего сердечников при нагружении вала крутящим моментом;
- статор, снабженный полюсами, на которых расположены индукционные катушки;
- электронную измерительную схему, выполненную с возможностью преобразования величины относительного смещения внутреннего и внешнего сердечников в информационный сигнал, характеризующий величину указанного смещения;
- внутренний сердечник выполнен зубчатым, своими зубьями обращенным к внешнему сердечнику;
- внешний сердечник снабжен радиально расположенными полюсами из магнитного материала.
Кроме того, вал содержит две части, из которых первая выполнена с возможностью совместного вращения с внутренним сердечником, а вторая - с возможностью совместного вращения с внешним сердечником, и упругий элемент установлен между указанными частями вала.
При этом упругий элемент может быть выполнен в виде торсионного вала, закрепленного между первой и второй частями контролируемого вала и расположенного соосно внутри полого контролируемого вала.
При этом упругий элемент может быть выполнен в виде по меньшей мере одной пружины сжатия, установленной между двумя дисками, из которых первый диск жестко соединен с первой частью вала, а второй диск жестко соединен со второй частью вала.
Кроме того, полюсы внешнего сердечника закреплены, например вклеены, между зубцами из немагнитного материала.
Кроме того, ротор выполнен с равным количеством полюсов внешнего сердечника и зубьев внутреннего сердечника, при этом ширина полюсов и расстояние между полюсами внешнего сердечника выполнены равными соответственно ширине зубьев и расстоянию между зубьями внутреннего сердечника, в воздушном зазоре.
Кроме того, полюсы статора выполнены такой ширины (S), которая обеспечивает прохождение магнитного поля через группу полюсов внешнего сердечника и зубьев внутреннего сердечника.
Кроме того, электронная измерительная схема содержит источник переменного тока, обеспечивающий подачу переменного тока на индукционные катушки, и микроконтроллер, обеспечивающий измерение падения напряжения на обмотках катушек в зависимости от изменения их индуктивного сопротивления при относительном смещении внутреннего и внешнего сердечников, и вычисление крутящего момента на контролируемом валу на основе измеренной величины падения напряжения.
Сущность предлагаемого устройства поясняют графические материалы.
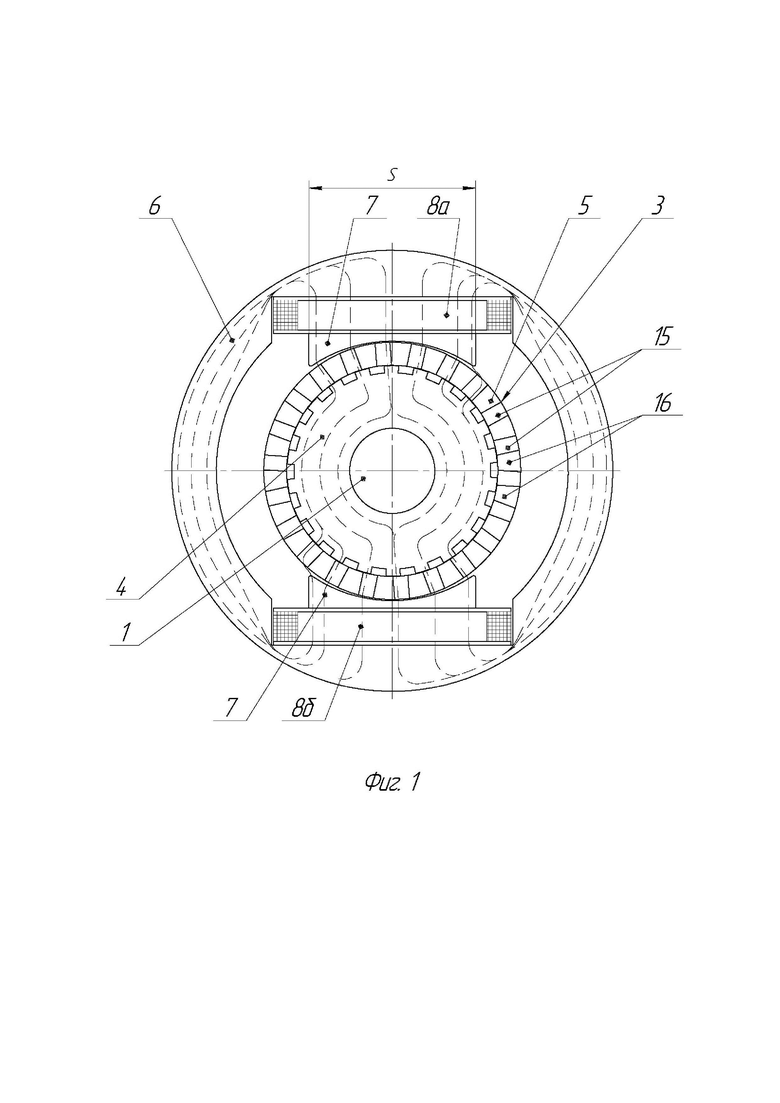
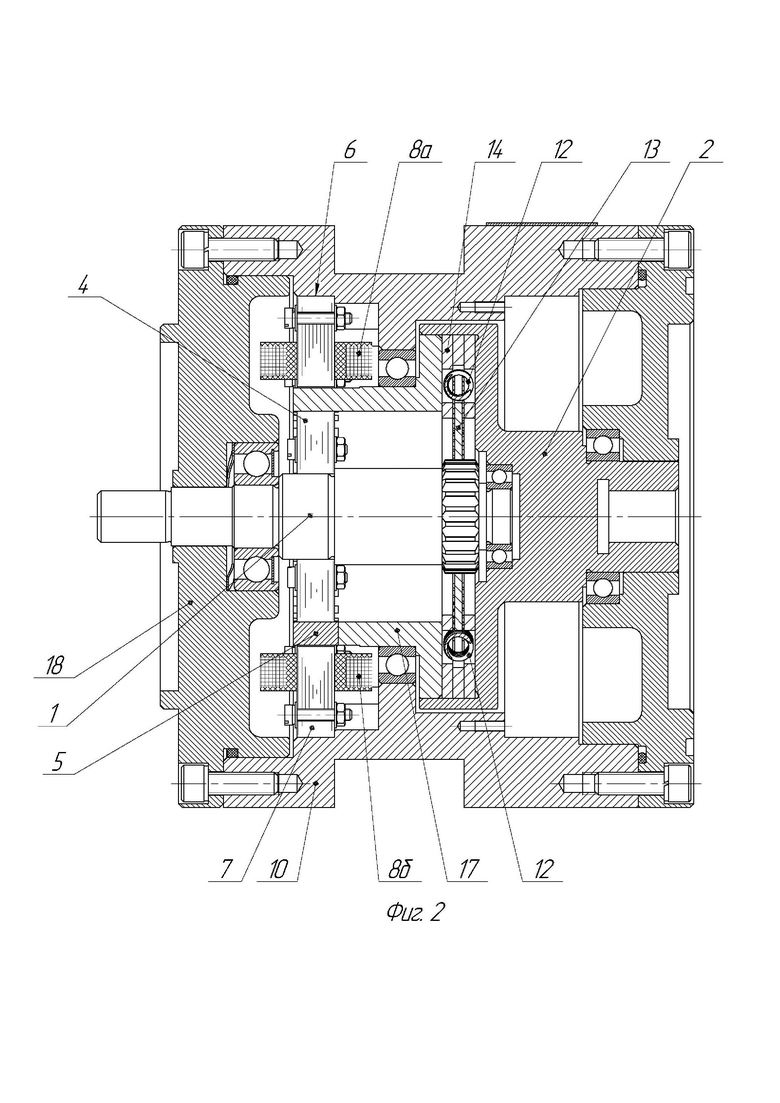
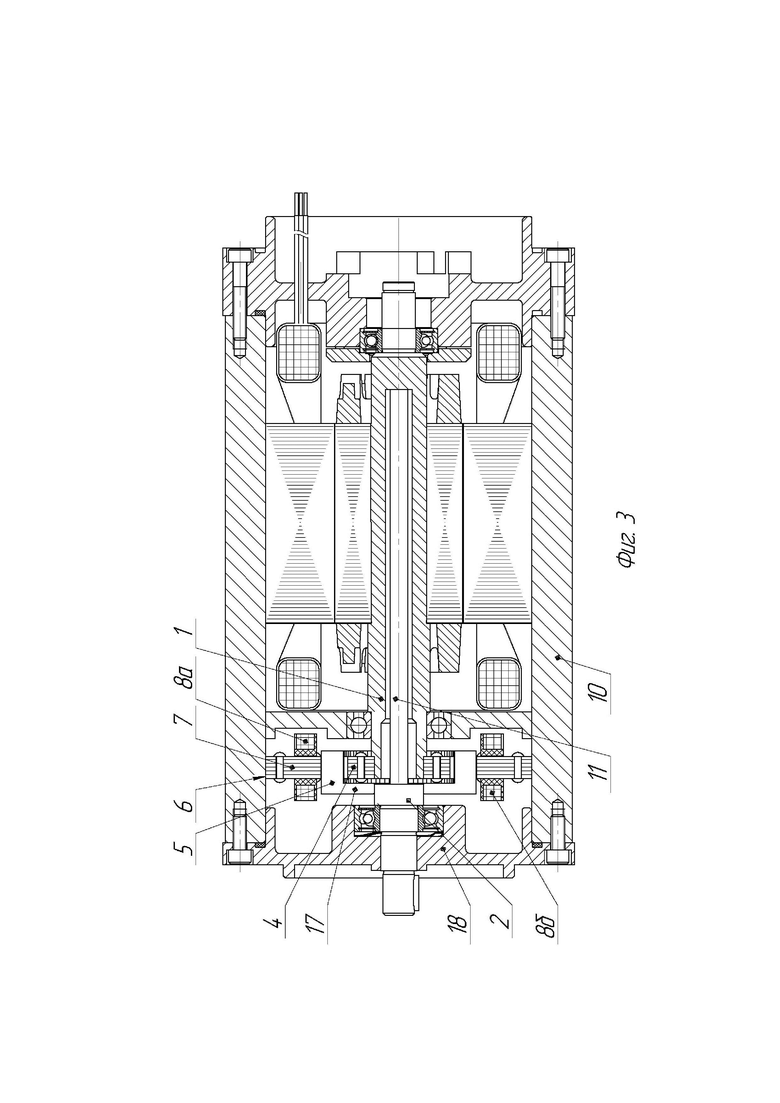
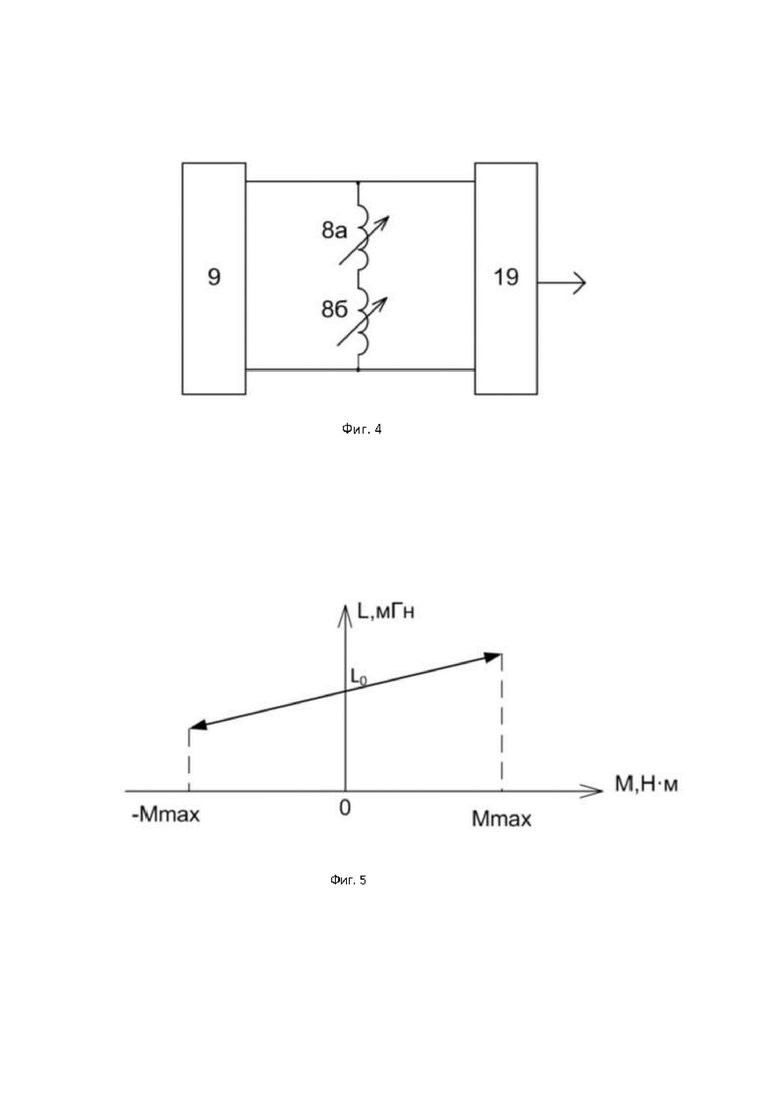
На фиг.1 показан вид спереди устройства (без корпуса). На фиг.2 показан продольный разрез конструктивного исполнения устройства в собственном корпусе. На фиг.3 показан продольный разрез конструктивного исполнения устройства, встроенного в корпус электрической машины. Фиг.4 поясняет измерительную схему устройства. На фиг.5 схематично показан график изменения индуктивности катушек в зависимости от крутящего момента.
Нижеуказанными позициями обозначены следующие элементы:
1 и 2 - вал; 3 - ротор; 4 - внутренний сердечник; 5 - внешний сердечник; 6 - статор; 7 - полюс статора; 8а, 8б - индукционные катушки; 9 - источник питания переменного тока; 10 - корпус; 11 - торсионный вал, 12 - пружины; 13 - первый диск; 14 - второй диск; 15 - полюсы из магнитного материала; 16 - зубцы из немагнитного материала; 17 - основание внешнего сердечника; 18 - подшипниковый щит; 19 - микроконтроллер.
На фиг.1 ширина полюсов 7 статора обозначена S, мм. Магнитные силовые линии, поясняющие магнитную цепь устройства, схематично показаны на фиг.1 штриховыми линиями.
Устройство измерения крутящего момента вала 1, 2 (фиг.2, 3) содержит ротор 3 (фиг.1), включающий внутренний сердечник 4 и коаксиальный ему внешний сердечник 5, и статор 6 с полюсами 7, на которых расположены индукционные катушки 8а и 8б. Внутренний сердечник 4 ротора жестко установлен на валу 1 с возможностью совместного вращения с валом 1. Внешний сердечник 5 ротора выполнен с возможностью совместного вращения с валом 2. При этом внешний сердечник 5 может быть жестко соединен с валом 2 (фиг.2) своим основанием 17 или жестко установлен на валу 2 (фиг.3) своим основанием 17.
Вал 1, 2 с ротором 3 установлен концентрически с необходимым воздушным зазором внутри статора 6. Статор 6 жестко закреплен в неподвижном относительно контролируемого вала 1, 2 корпусе 10. Часть вала 1 и часть вала 2 соединены упругим элементом, обеспечивающим относительное смещение внутреннего 4 и внешнего 5 сердечников при нагружении вала 1, 2 крутящим моментом.
В конкретном исполнении на фиг.3 упругий элемент выполнен в виде торсионного вала 11, расположенного соосно внутри полого вала 1. Торсионный вал 11 закреплен между частями вала 1 и 2. Торсионный вал 11 изготовлен из материала с высокими характеристиками упругости.
В конкретном исполнении на фиг.2 упругий элемент выполнен в виде одной или нескольких пружин 12 сжатия. Каждая из пружин 12 установлена между первым 13 и вторым 14 дисками, из которых первый диск 13 жестко соединен с валом 1, второй диск 14 жестко соединен с валом 2. В случае использования нескольких пружин 12, указанные пружины 12 расположены по окружности равноудаленно друг от друга.
Закрепление торсионного вала 11 с частями вала 1 и 2, а также соединение дисков 13 и 14 с частями вала соответственно 1 и 2 может быть произведено любыми известными средствами механического соединения, например, сваркой, крепежными элементами и т.д.
Внутренний сердечник 4 расположен внутри внешнего сердечника 5 и выполнен в виде зубчатого диска, своими зубьями обращенного к внешнему сердечнику 5. Внутренний сердечник 4 изготовлен шихтованным из листов электротехнической стали.
Внешний сердечник 5 снабжен радиально расположенными полюсами 15 (фиг.1), выполненными из магнитного материала. Полюсы 15 выполнены в виде пластин, например прямоугольной формы. Полюсы 15 закреплены, например вклеены, между зубцами 16 из немагнитного материала. Немагнитные зубцы 16 закреплены или выполнены в виде единой детали с основанием 17 (фиг.2, 3) внешнего сердечника. Количество полюсов 15 внешнего сердечника 5 равно количеству зубьев внутреннего сердечника 4. Ширина полюсов 15 и расстояние между полюсами 15 выполнены равными соответственно ширине зубьев внутреннего сердечника 4 и расстоянию между зубьями внутреннего сердечника 4, в воздушном зазоре. В отсутствии на контролируемом валу 1, 2 крутящего момента внутренний и внешний сердечники 4 и 5 находятся в исходной позиции, условно принятой за нулевую. В нулевой позиции положение зубьев внутреннего сердечника 4 может совпадать или не совпадать с положением полюсов 15 внешнего сердечника 5.
Статор 6 изготовлен шихтованным из листов электротехнической стали и снабжен диаметрально расположенными полюсами 7. При этом статор 6 может быть выполнен с одной или двумя парами диаметрально расположенных полюсов 7. Полюсы 7 статора выполнены такой ширины (S), которая обеспечивает прохождение магнитного поля одновременно через группу полюсов 15 и зубьев ротора 3 (см. фиг.1).
Катушки 8а и 8б электрически соединены с измерительной схемой (фиг.5), выполненной с возможностью преобразования величины относительного смещения внутреннего и внешнего сердечников 4 и 5 в информационный сигнал, характеризующий величину указанного смещения. Измерительная схема включает в себя источник питания переменного тока 9, обеспечивающий подачу переменного тока заданных параметров на катушки 8а и 8б, и микроконтроллер 19, обеспечивающий измерение падения напряжения на обмотках катушек 8а и 8б и вычисление крутящего момента на контролируемом валу 1, 2 на основе измеренной величины падения напряжения. Источник питания 9 может быть выполнен, например, на основе операционного усилителя и транзистора, или на основе другой известной схемы вторичного источника питания переменного тока. Микроконтроллер 19 снабжен первым и вторым аналоговыми входами, соединенными с выводами катушек, аналого-цифровым преобразователем (АЦП) и цифровым выходом для отправления информационного сигнала.
Элементы измерительной схемы 9 расположены по меньшей мере на одной печатной плате (на фиг. не показана), закрепленной с корпусом 10 (фиг.2 и 3), предпочтительно с внешней стороны корпуса 10. Корпус 10 снабжен передним подшипниковым щитом 18 и задним подшипниковым щитом (на чертеже не обозначен). Выходной конец вала 1, 2 выполнен выступающим из корпуса 10 со стороны подшипникового щита 18, с возможностью механического соединения с исполнительным механизмом (на фиг.не показан), например, трубопроводной арматурой.
Пример 1 исполнения устройства.
В конкретном исполнении на фиг.1 статор 6 выполнен с одной парой полюсов 7, расположенных диаметрально. Ротор 3 выполнен с 22 полюсами 15 внешнего сердечника 5 и зубьями внутреннего сердечника 4. Силовые линии магнитного поля, образующие магнитную цепь, проходят через 16 полюсов 15 и зубьев внутреннего сердечника 4 (по 6 полюсов и зубьев с каждой стороны ротора 3). Это составляет 12/22=0,55 часть от всех полюсов и зубьев ротора 3.
Пример 2 исполнения устройства.
Статор 6 выполнен с одной парой полюсов 7, расположенных диаметрально. Ротор 3 выполнен с 36 полюсами 15 внешнего сердечника 5 и зубьями внутреннего сердечника 4. Силовые линии магнитного поля, образующие магнитную цепь, проходят через 14 полюсов 15 и зубьев внутреннего сердечника 4 (по 7 полюсов и зубьев с каждой стороны ротора 3). Это составляет 14/36=0,39 часть от всех полюсов и зубьев ротора 3.
Устройство измерения крутящего момента вала работает следующим образом.
Переменный ток с источника переменного тока 9 (фиг.4) поступает на последовательно соединенные катушки 8а и 8б. Протекание переменного тока в катушках 8а и 8б приводит к созданию магнитного потока, который проходит через ротор 3 и пересекает витки катушек 8а и 8б (см. штриховые линии магнитного поля на фиг.1). Известно, что величина сопротивления катушек 8а и 8б протекающему переменному току определяется их индуктивностью.
В случае приложения крутящего момента к валу 1, 2 и вращения вала, упругий элемент обеспечивает относительное смещение внутреннего 4 и внешнего 5 сердечников друг относительно друга. Так, относительное смещение сердечников 4 и 5 на фиг.3 обеспечено скручиванием торсионного вала 11. Относительное смещение сердечников 4 и 5 на фиг.2 обеспечено поворотом первого диска 13 относительно второго диска 14 в результате сжатия пружины 12. В общем случае величина относительного смещения сердечников 4 и 5 прямо пропорциональна величине приложенного крутящего момента. При относительном смещении внутреннего и внешнего сердечников 4 и 5 происходит изменение сопротивления магнитной цепи, пропорционально указанному смещению. Следовательно, относительное смещение внутреннего и внешнего сердечников 4 и 5 приводит к пропорциональному изменению индуктивности катушек 8а и 8б и их индуктивного сопротивления, вне зависимости от скорости вращения контролируемого вала 1, 2. В свою очередь, изменение индуктивного сопротивления катушек 8а и 8б приводит к пропорциональному изменению падения напряжения на обмотках указанных катушек. Микроконтроллер 19 (фиг.4) в непрерывном режиме измеряет падение напряжения на обмотках катушек 8а и 8б и использует данные измерений для обработки и вычисления момента на контролируемом валу 1, 2. При этом выходной информационный сигнал отправляется микроконтроллером 19 постоянно в течение всего процесса измерения и не зависит от скорости вращения вала.
Изменение величины индуктивности катушек 8а и 8б при изменении крутящего момента от максимального значения при скручивании в одну сторону (Mmax) до максимального значения при скручивании в противоположную сторону (-Mmax) схематично показано на фиг.5. В отсутствии на контролируемом валу 1, 2 крутящего момента индуктивность катушек 8а и 8б равна L0, мГн. Приложение к валу 1, 2 крутящего момента приводит к изменению индуктивности. Изменение индуктивности в данном конкретном случае показано стрелкой, направленной на графике вправо. В случае изменения направления вращения вала 1, 2 в противоположную сторону, значения индуктивности изменяются по стрелке, направленной на графике влево.
В случае приложения к контролируемому валу 1, 2 относительно небольшого момента, величина которого не приводит к его вращению, но вызывает относительно небольшое скручивание торсионного вала 11 (фиг.3) или сжатие пружины 12 (фиг.2), величину крутящего момента на валу 1, 2 определяют по изменению индуктивности катушек 8а, 8б, аналогично вышеописанному примеру с вращающимся валом 1, 2. Это позволяет измерять величину приложенного крутящего момента с одинаковой точностью как при вращении вала, так и в статичном положении вала. Последнее особенно актуально при снятии характеристик
привода трубопроводной арматуры с постановкой запорного органа арматуры на упор в положении "ЗАКРЫТО" или "ОТКРЫТО."
Предложенное устройство обеспечивает получение выходного измерительного сигнала при прохождении магнитного потока от полюсов 7 статора одновременно через группу полюсов 15 и зубьев ротора, что приводит к сглаживанию пульсаций в выходном сигнале нагруженного моментом ротора 3 (см. фиг.5). Это повышает точность измеряемого крутящего момента и позволяет, в частности, измерять величину приложенного крутящего момента в статичном положении вала.
Таким образом, предложенное устройство обеспечивает стабильную точность измерения крутящего момента вала 1, 2 в различных режимах работы, вне зависимости от скорости вращения вала, в том числе при нулевой скорости вращения, а также независимо от направления вращения вала. Расширение функциональных возможностей устройства позволяет использовать его, в частности, в многооборотных и неполнооборотных приводах, приводах реверсивного действия, а также при удержании исполнительного механизма в положении на упор и при динамическом нагружении вала. Кроме того, предложенное устройство может широко использоваться за счет своей универсальной конструкции, позволяющей применять его как в собственном корпусе, так и в качестве встроенного в корпус электрической машины. При этом устройство имеет простую и технологичную конструкцию за счет того, что состоит из небольшого количества простых в изготовлении деталей и простой измерительной схемы, и, следовательно, обладает высокой надежностью в работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |
| Энергонезависимый датчик углового положения вала | 2023 |
|
RU2807016C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2509665C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА | 2007 |
|
RU2334962C1 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| БЕСКОЛЛЕКТОРНЫЙ АКСИАЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2024 |
|
RU2833629C1 |
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1995 |
|
RU2097769C1 |
| ПОГРУЖНОЙ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321141C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1999 |
|
RU2145460C1 |
Изобретение относится к области измерительной техники, в частности к средствам измерения силы на основе упругих элементов. Изобретение используется для измерения величины крутящего момента на валах. Устройство измерения крутящего момента вала содержит ротор, включающий внутренний и внешний сердечники, установленные на валу коаксиально друг другу; вал, снабженный упругим элементом, обеспечивающим относительное смещение внутреннего и внешнего сердечников при нагружении вала крутящим моментом; статор, снабженный полюсами, на которых расположены индукционные катушки; электронную измерительную схему, выполненную с возможностью преобразования величины относительного смещения внутреннего и внешнего сердечников в информационный сигнал, характеризующий величину указанного смещения. Внутренний сердечник выполнен зубчатым, своими зубьями обращенным к внешнему сердечнику; внешний сердечник снабжен радиально расположенными полюсами из магнитного материала. Технический результат - обеспечение стабильной точности измеряемого крутящего момента, вне зависимости от скорости вращения вала, в том числе при нулевой скорости вращения, а также независимо от направления вращения вала. 7 з.п. ф-лы, 5 ил.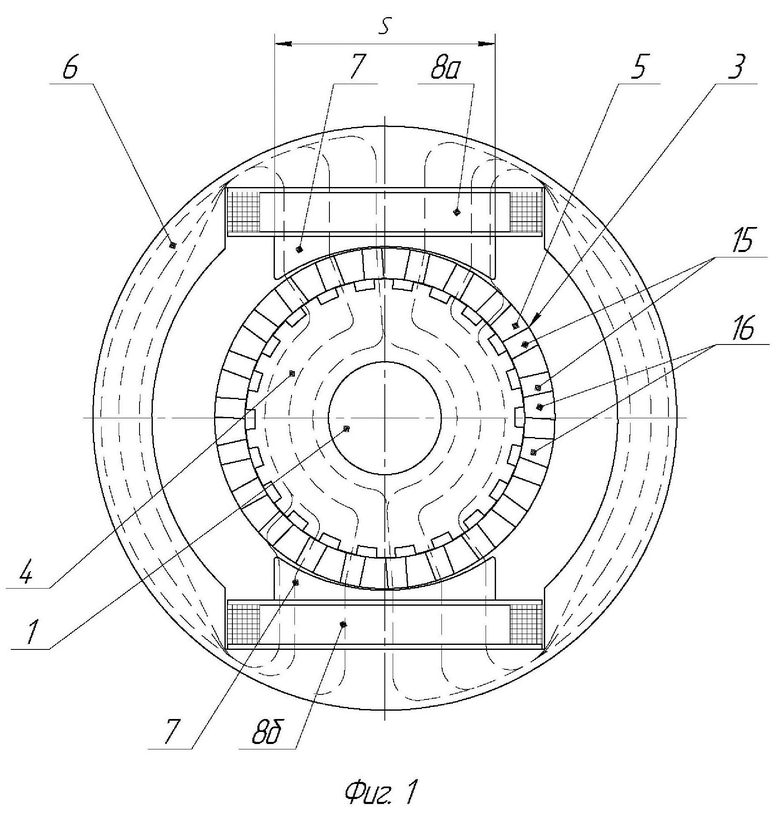
1. Устройство измерения крутящего момента вала, содержащее:
- ротор, включающий внутренний и внешний сердечники, установленные на валу коаксиально друг другу;
- вал, снабженный упругим элементом, обеспечивающим относительное смещение внутреннего и внешнего сердечников при нагружении вала крутящим моментом;
- статор, снабженный полюсами, на которых расположены индукционные катушки;
- электронную измерительную схему, выполненную с возможностью преобразования величины относительного смещения внутреннего и внешнего сердечников в информационный сигнал, характеризующий величину указанного смещения;
- внутренний сердечник выполнен зубчатым, своими зубьями обращенным к внешнему сердечнику;
- внешний сердечник снабжен радиально расположенными полюсами из магнитного материала.
2. Устройство по п.1, отличающееся тем, что вал содержит две части, из которых первая выполнена с возможностью совместного вращения с внутренним сердечником, а вторая - с возможностью совместного вращения с внешним сердечником, и упругий элемент установлен между указанными частями вала.
3. Устройство по пп.1 и 2, отличающееся тем, что упругий элемент выполнен в виде торсионного вала, закрепленного между первой и второй частями контролируемого вала и расположенного соосно внутри полого контролируемого вала.
4. Устройство по пп.1 и 2, отличающееся тем, что упругий элемент выполнен в виде по меньшей мере одной пружины сжатия, установленной между двумя дисками, из которых первый диск жестко соединен с первой частью вала, а второй диск жестко соединен со второй частью вала.
5. Устройство по п.1, отличающееся тем, что полюсы внешнего сердечника закреплены, например вклеены, между зубцами из немагнитного материала.
6. Устройство по п.1, отличающееся тем, что ротор выполнен с равным количеством полюсов внешнего сердечника и зубьев внутреннего сердечника, при этом ширина полюсов и расстояние между полюсами внешнего сердечника выполнены равными соответственно ширине зубьев и расстоянию между зубьями внутреннего сердечника, в воздушном зазоре.
7. Устройство по п.1, отличающееся тем, что полюсы статора выполнены такой ширины (S), которая обеспечивает прохождение магнитного поля через группу полюсов внешнего сердечника и зубьев внутреннего сердечника.
8. Устройство по п.1, отличающееся тем, что электронная измерительная схема содержит источник переменного тока, обеспечивающий подачу переменного тока на индукционные катушки, и микроконтроллер, обеспечивающий измерение падения напряжения на обмотках катушек в зависимости от изменения их индуктивного сопротивления при относительном смещении внутреннего и внешнего сердечников и вычисление крутящего момента на контролируемом валу на основе измеренной величины падения напряжения.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА ВРАЩАЮЩЕГОСЯ ВАЛА | 1991 |
|
RU2050531C1 |
| US 4984474 A1, 15.01.1991 | |||
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 2003 |
|
RU2244274C1 |
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1994 |
|
RU2122742C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1998 |
|
RU2152600C1 |

