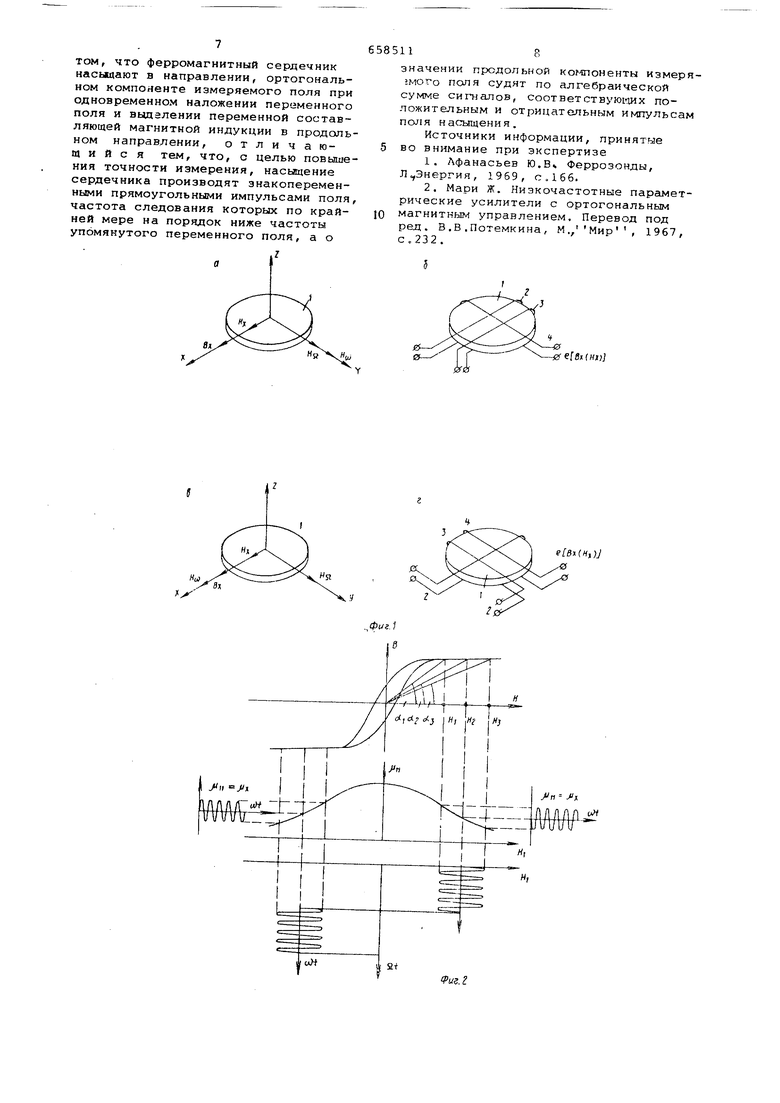
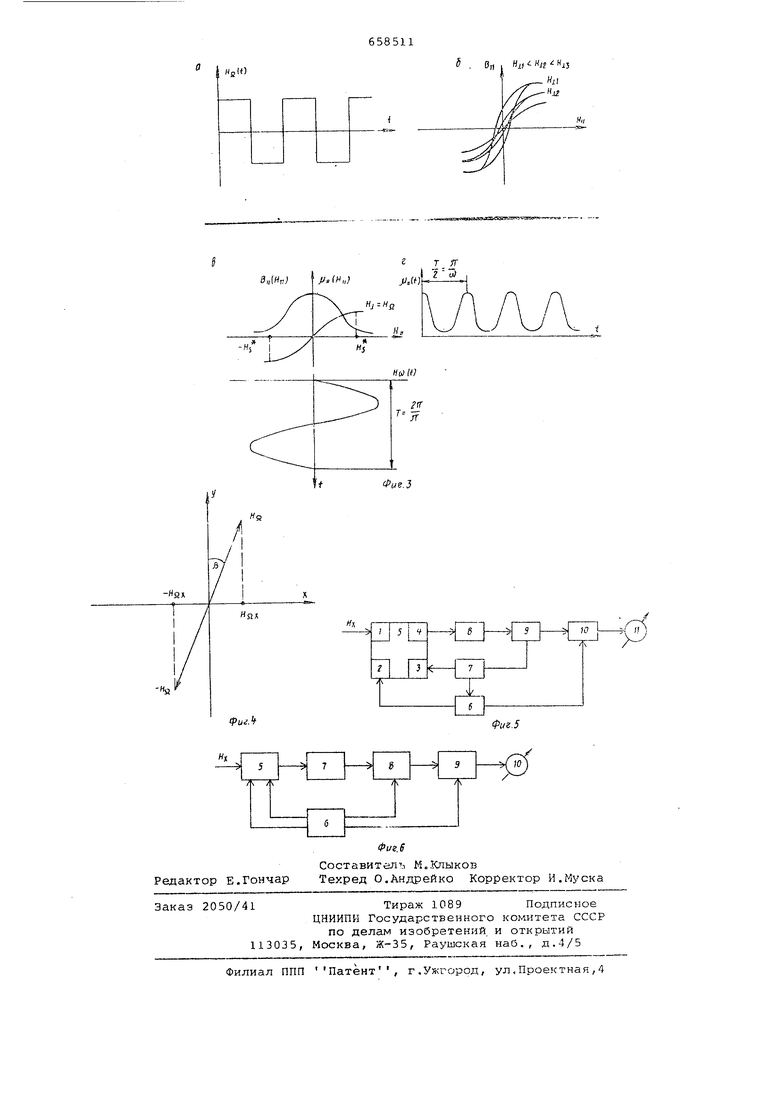
показаны эпюры, поясняюгдие принципы м дуляции продольной проницаемости; на фиг 4 изображена векторная riHarpaiviMa поясняющая, возникновение помехи, со даваемой полем насыщения; на фиг.5 и б приведены функциональные дхемы измерительных устройств, реализующих предложенный способ. Способ (см,фиг,1, а и б) заключае ся в том, что ферромагнитный сердечник 1/ выполненный, например, в форм диска, насыщают в каправлении Y поле Tfsi (t) в виде знакопеременных прямоугольных к:лпульсов Hft (t) ,.,natj где Нйг. - амплитуда импульса, и™ круговая частота. Это поле создают с помощью катуалс 2, пропуская по ней ток соответствую щей формы, В том же направлении налагают поле (t) , например, екну соидальное (t)H..v t, амплитуда паля, - круговая частота. ,(t) создают с помощью к а туш ки 3fпропуская гю ней синусоидальный ток. Частоту 2 выбирагот из расчета айО,1Ш . Поле ) модулирует продольную проницаемость/и ;. Поэтому прк наличии измеряемого прстоян - ого поля iTj в направлении х появляется составляющая магнитной индукции j5{t) В jj-sin «D-fc , где а, - амплитуда, являющаяся функцией fl - Информацию ,об этой составляющей, а слеf BaxenbHOf и об измеряемой компонент i постоянного ипк инфранизкочастотко ГО магнитного поля, N3O)KHO ПОЛ/ЧИТЬ, измеряя ЭДС наводегмую Б катушке 4, ориентироваг-шой перпендикулярно катушкам 2 и 3 „ Принцип модуляции продольной ПрО ницаемости сердечника по предлагае мому способу (см,фиг,2) заключается в следующем. Значения Hsi. H2H Н, выбирают из расчета, чтобы модуляция продольной проницаемоеTH / -,aj. осуществлялась за пределами гистерезисной петли, , на участках одноэначной зависимости В(Н), где шум Баркгаузена отсутствует или сведен к минимуму. Весьма важньп-/ моментом при этом оказывается зависш ость начальной фазы процессгг U,. Сш1) от изменеНИН знака поля насыщения -- начальная фаза модулируемой продольной проницаемости изменяется, на 180® при смене знака поля насыщения. А это означает что при наличии компоненты измеряе мого поля фаза ЭДС, наводимой в измерительной катушке 4, будет также периодически изменяться на 180°. т.е сигнал будет модулирован по фазе с частотой-51. Эта дополнительная модуляция как раз и позволяет .отделить полезный сигнал от помех, создаваемых полем насыщения Н si (t) и переменным модулирующим полем H((t) . Из-за несовершенства реальных измерительных устройств, например, из;ia неор-гргональности катушек 2 и 4, вектор (t) будет проектироваться па продольную ось х (см.фиг.4), При положительном импульсе поля насыщения проекция HP-.,, будет иметь один знак, а при отрицательном - другой. Поэтому за. полный период процесса iTsi(t) суммарная намагниченность сердечника оказ(э вается равной нулю При этом выходная ЭДС, наводимая в катушке 4 за тот же период, уже не будет модулирована по фазе, так как со сменой знака поля Е5асыш.ения изменяется не только знак проекции вектора 1Гй(1) на продольную ось, но и начальная фаза продольной проницаемости ,tt,j (isot) , Что 2 асается наводки, создава,емой полем H(t) , например, из-за неортогональности катушек 3 и 4, то она также не будет модулированной по фазе. Другой вариант способа (см.фиг.1, ии2) заключается в том, что ферромагнит -ш1й сердечник 1, выполненный, например, в форме диска, насыщают в на правлении Y полем HH(t) в виде знакопеременных прямоугольных импульсов -(см ,фиг , 3 , а) HSJ. (t)- H fSigfn-S-iM9 -t, - амплитуда поля, круговая частота.-, Это поле создают с помощью катушки 2, проп ская по ней ток соответствующей формы. В направлении К налаH,j(t) , например, синусои1ают по.-е дальное и( H sincKt, где Н ЦJ - аг плитуда поля , ( круговая частота. Поле Hi(t) создают с помощью кату акл 3, пропуская по ней синусоидальHfciH ток. Частоту л выбираем из условия 9- и О,-1 ш. n(t) Поле Н. О) модулирует продольную проницаемость/; г При наличии измеряемого постоянного поля Н , в направлении х появляются четные гармоники переменной магнитной индукции в„п (t) sin 2n Ш t, sn -i. где . амплитуда п-ной четной гармоники, являющаяся функцией ,2,3. . - номер четной гармоник и. Информацию об измеряемой компоненте Hj, постоянного или инфранизкочас.тотного магнитного поля можно полу шть, выделяя из ЭДС, наводимой в измерительной катушке 4,ориентированной в направлении х сигнал п-ой четной гармон.ики переменной магнитной ин.цукции . Принцип модуляции продольной проницаемости Л сердечника по второму варианту способа заключается в следующем. В5-Щ зависимости В (Н| ) существенным образом зависит от величи VTU поля в поперечном направлении Н (см. ..фиг. 3,5) и не зависит от знака эт го поля. Устанавливая амплитуду Ни попереч ного насыщающего поля, соответствующую безгистеризисной зависимости мы тем самым, как и в спо соое-прототипе, уменьшаем шумы Баркгаузена при модуляции продольной про ницаемости Л1 полем H(y{t) , накладываемым в продольном направлении. Амплитуду H(ju этого поля выбираем из расчета получения достаточной глубины модулиции р , что соответствует условию Ну, (1 2 )Н|, где Н1 - поле насыщения сердечника в продольном направлении (см фиг . 3 ,в) . Поскольку XJ,| (Н,, ) - функция четная, то основной частотой завис1-1Мост Л| (t) будет 2 ш (см.фиг, 3 ,г) , что и -обусловливает появление в спектре магнитной индукции в {t ) четных гармоник Bjj (t) при наличии компоненты Н измеряемого погя . Различие по частоте полезн.ого сиг нала и переменного поля Hj/j(t) позволяет устранить наводки, создаваемые этим полем. Из-за несовершенства реальных измерительных устройств, напри 4ер, изза неортогональности катушек 2 и 4 (см.фиг.4, угол|3), поперечное насыщающее поле будет создавать помеху, В выходном сигнале измерительной катушки 4 эта помеха обусловлена проекцией наj( вектора Hjj(t) на продольную ось X (см.фиг, 4) , Проекции Нп., соответствующие положительному и отрицательному импуль сам поля насыщения, равны по величине, но различны по знаку, а ЭДС в катушке 4 от этих проекций отличаются друг от друга по фазе на ПГ, Фаза же ЭДС измеряемой компоненты Н у не зависит от знака поля HSl(t) . В соответствии с предложекиьм спо собом о значенуш измеряемой компоне ты поля судят по алгебраической сумм сигналов, соответствующих положител ным и отрицательны1ч1 импульсам поля насыщения. Таким образом, за счет насыщения сердечников в поперечном направлении знакопеременньп-ли прямоугольными импульсами поля, алгебраического сумм рования сигналов соответствующих по ложительным и отрицательным импульс поля насыщения, удается отделить п лезный сигнал от помех, создаваемых полем насыщения и переменным модули рующим полем, и, тем самым, повыЬит точьюсть измерения компонент вектор 11 постоянного или инфранизкочастотного магнитного поля. В качестве примера реализации первого варианта спос ;ба (см.фиг, 5) приведена функциональная схема измерительного устройства. Первичный преобразователь 5-феррозонд или магнитный усилитель, содержащий сердечник 1 и катушки 2,3 и 4, подключен ic делителю частоты 6, формирующего знакопеременные прямоугольные импульсы тока с частотой следования Л, которые, протекая по катущке 2, насы1цают сердечник 1 в направлении, ортогональном измеряемой компоненте Н, слабого постоянного или инфранизкочастотного магнитного поля, Делитель б синхронизирован с генератором 7, вырабатывающим синусо здальный ток частоты Ш, который, протекая по катушке 3, обеспечивает модуляцию продольной магнитной проницаемости сердечника 1. Сигнал частоты ии, наводимой в катушке 4 , поступает на Бходл избирательного усилителя 8 и затем - на синхронный детектор 9, питаюл.ийся от генератора 7. Далее сигнал, поступает на фазовый дискриминатор 10, осуществляющий вычитание сигналов (напряжен й или токов), соответствующих положительным и отрицательным импульсам поля насыщения. Фазовый дискриминатор коммут15руется напряжением частоты Л, скимаемы1 1 с делителя б, и непосредственно сопряжен с регистрирующим прибором 11. В качестве примера реализации второго варианта способа (см,) приведена функциональная cxehia измерительного устройства. Первичный преобразователь 5 - феррозонд или маг нитный усилитель. Блок б, управляющий работой устройства в целом и формирующий токи для первичного преобразователя 5, необходимые для создания поперечного насыщения поля Н 51 (t) и продольного переменного поля (t) . Вьжодной сигнал с первичного преобразователя 5 поступает на избирательный усилитель 7, выделяющий вторуг гармонику магнитной индукции. Далее сигнал детектируется синкронныгл детектором 8 и посаупает на сум1;атор 9, который управляется частотой Л с блока. 6. Cyis&iaTop 9 непосредственно сопряжен с регистрирующим устройством 10. Предлагаемый способ измерения компонент вектора постоянного или инфранизкочастотного магнитного поля позволит ча 1,5 - 2 порядка снизить порог чувствительности измерительных устройств и тем самым повысить точность измеиения магнитных величин. Формула изобретения Способ измерения компонент зекюмагнитного поля, заключающийся в
том, что ферромагнитный сердечник насыщают в направлении, ортогональном компоненте измеряемого поля при одновременном наложении переменного поля и выцалении переменной составляющей магнитной индукции в продольном направлении, отл и ч ающ и и с я тем, что, с целью повышения точности измерения, насыщение сердечника производят знакопеременными прямоугольными импульсами поля, частота следования которых по крайней мере на порядок ниже частоты упомянутого переменного поля, а о
7 а
значении продольной кo moнeнты измеряемого поля судят по алгебраической сумме сигналов, соответствуюишх положительным и отрицательным импульсам поля насыщения.
Источники информации, принятые во внимание при экспертизе
1.Афанасьев Ю.В Феррозонды, Л,Энергия, 1969, сЛбб.
2,Мари Ж. Низкочастотные параметрические усилители с ортогональным магнитным управлением. Перевод под ред. В.В.Потемкина, М.,Мир, 1967, с.232.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения параметров слабого постоянного или медленно изменяющегося магнитного поля | 1978 |
|
SU739444A1 |
| Способ измерения параметров магнитного поля | 1982 |
|
SU1035541A1 |
| Устройство для измерения неоднородности магнитных потоков | 1978 |
|
SU742838A1 |
| Феррозонд | 1979 |
|
SU864200A1 |
| Устройство для измерения параметровМАгНиТНОгО пОля | 1979 |
|
SU851292A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ДЛИННОМЕРНОМ ФЕРРОМАГНИТНОМ ОБЪЕКТЕ | 2017 |
|
RU2672978C1 |
| Способ измерения переменной магнит-НОй иНдуКции и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU822093A1 |
| Способ определения крутящего момента и устройство для его осуществления | 1976 |
|
SU657281A1 |
| Способ измерения характеристик аморфных ферромагнитных микропроводов | 2016 |
|
RU2632996C1 |
| Способ измерения индукции магнитного поля | 1976 |
|
SU611164A1 |
e Bt{HtiJ
1
ifuz.l
HnU)
3„1И„)
,1н„)
IIT
JT
