1
Изобретение относится к области промысловой гео.физики и, в частности, касается телеизмерения скважинных геофизических параметров при передаче информации на дневную поверхность.
В области промысловой геофизики известно несколько способов телеизмерения скважинных геофизических параметров.
Общим для всех способов является перемещение измерительного устройства по стволу скважины с помощью каротажных кабелей или колонны бурильных труб, преобразование физических свойств горных пород в электрические сигналы, прямая или после преобразования передача информации на дневную поверхность, обратное преобразование и регистрация.
Известен способ телеизмерения, реализованной в лаборатории каротажной станции типа АКС/Л-7. По этому способу синусоидальный ток частоты 6-8 Гц через многожильный кабель подводится к токов ым электродам зонда, а снятая с измерительньгх электродов разность потенциалов по тому же кабелю передается на дневную поверхность в наземную аппаратуру, где производится фазочувствительное выпрямление и регистрация 1.
Недостатком этого способа является недопустимая погрешность телеизмерения изза затухания сигнала в кабелях большой длины.
Известен также способ телеизмерения скважинных геофизических параметров на одножильном кабеле. По этому способу из наземной аппаратуры через кабель-в скважинный прибор подается nepeivfeHHoe напряжение частоты 300 Гц. Ток частоты 300 Гц подводится к токовым электродам зонда и далее вытекает в ГгЪрЪ11:ь,окружающие скважину. Снятая с измерительных электродов разность потенциалов, характеризующая удельное сопротивление пластов, усиливается, выпрямляется и в виде постоянного напряжения через кабель подается на регистратор 2. Недостатком способа является небольщой динамический диапазон измерения параметра и заВйсимость ТбчноЪти измерения от изменения парамеТров кабеля.
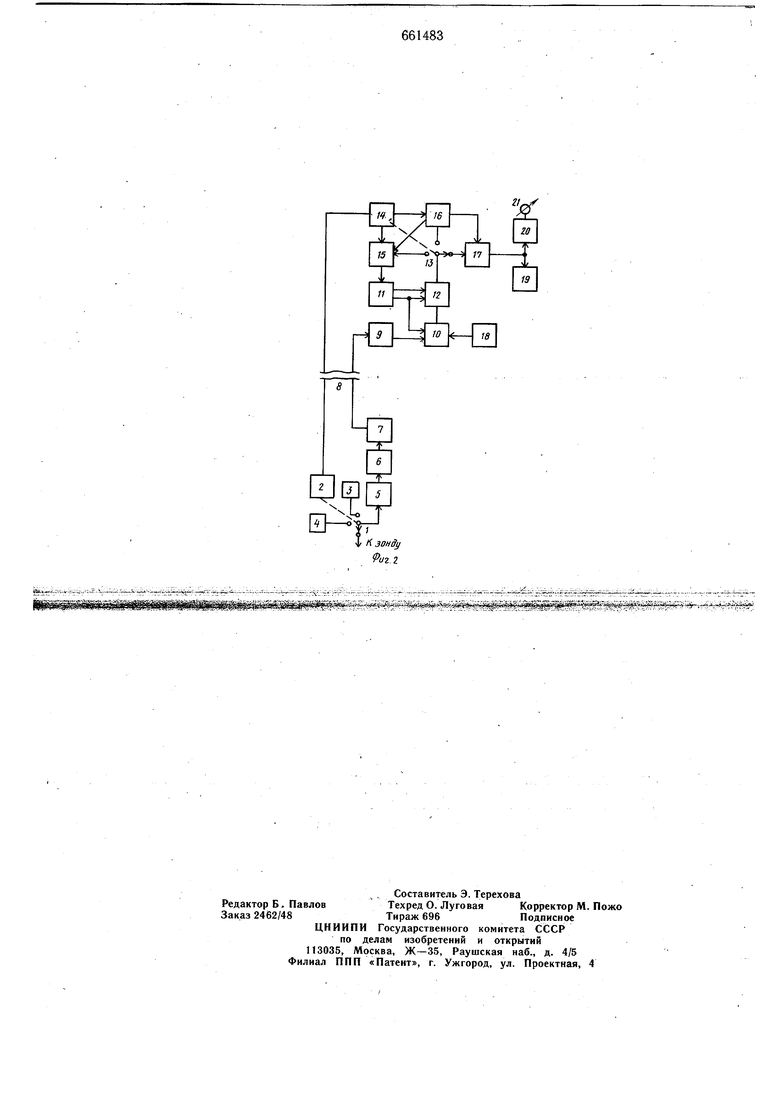
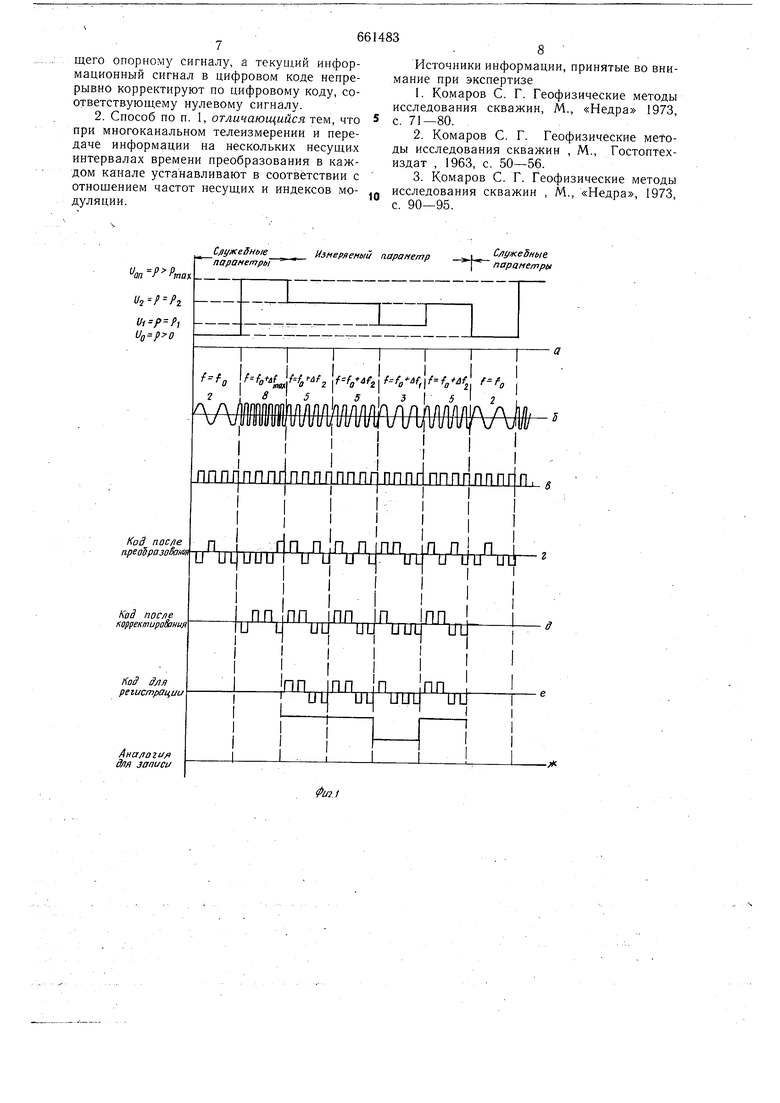
Наиболее близким техническим решением является способ, основанный на частотной модуляции несущей электрическим сигналом, характеризующим физическое свойство горных пород, передаче частотно-модулированного сигнала на. поверхность, частотном д,етектерировании и. регистрации информации аналоговой или цифровой форме. Этот способ реализован в аппаратуре, например, КПС-1 (КПС-2) 3. По этому способу высокачастотное переменное напряжение час тоты fo, генерируемое электронным LC или RC генератором, модулируется по частоте напряжением U, пропорциональным, например, удельному сопротивлению горных пород, и при этом на выходе модулятора действует сигнал частоты fo +Д f, гдВ Д f U. Принятый на поверхности сигнал демодулируется и. при этом привращение частоты Д Jo преобраЗОвьГВается в изменяющееся по амплитуде напряжение, которое и регистрируется в виде кривой удельного сопротивления в функции глубины скважины. Недостатком способа является «уход частоты fo вследствие нестабильности LC или RC генераторов во времени (кварцевая стабилизация частоты невозможна вследствие высоких температур в скважине) и от температурных воздействий. Этот недостаток способа выражается в нестабильности нулевой установки, отсюда снижение точности измерения и динамического диапазона. Предлагаемый способ телеизмерения лишен указанных недостатков. Цель предлагаемого способа - повьгшение точности и расширение динамическото дйа п азона измерения параметров. Для этого периодически по сигналам управления модулируют по частоте несущую нулёвым и опорным сигналами, при демодуляции, за определенный интервал времени преобразуют число волн частотно-модулированного сигнала, в цифровой код, причем сигнал начала временного интервала фор сигналам, характержзующим шаги квантования по глубине, сигнал конца временного интервала периодически корректйрувзт по данным цифрового кода, соответствующего опорному сигналу, а текущий информационный сигнал в цифровом коде непрерывно корректируют по цифровому ко ду, соответствующему нулевому сигналу. При многоканальном телеизмерении и передаче информации на нескольких несущих интервалах времени преобразования в каждом каналеустайавливают в соответствии с Отнощением частот несущих и индексов модуляции. На фиг. 1 приведены временные диаграммы процесса телеизмерения; на фиг. 2 дана блок-схема телеизмерительной системы, реализующая предлагаемый способ. На фиг. 1, а показана диаграмма (огибающая) сигналов, подлежащих телеизмерению. Служебные параметры, измеряемые периодически (например, через 100 или 200 или более числа измерений информационных параметров), включают нуль-:сигнал Uo X) и опорный сигнал UdnS fl Pmu( В качестве примера рассматривается один информационный параметр, представленный удельным сопротивлением .Я .На фиг. 1,6 приведен вид частотно-модулированного сигнала (fo - нулевая частота, Дf - девиация частоты). На фиг. 1,в показаны щаги и разрядность преобразования частотно-модулированного сигнала в цифровой код. На фиг. 1,г показан цифровой код (двоичный четырехразрядный), соответствующий частотно-модулированным сигналам на отрезках (временной интервал), ограниченных вертикальными пунктирными линиями. На фиг. 1,д показан цифровой код, откорректированный по цифровому коду, соответствующему нуль-сигналу. На фиг. 1,е показан цифровой код информационного параметра, поступающий на регистрацию. На фиг. 1,ж показана форма аналогового сигнала, преобразованная из цифрового кода информационного параметра. Как следует из диаграммы фиг. 1,6, число периодов частотно-модулированного сигнала для нулевого сигнала Ua принято равным двум, для опорного сигнала Uon - 8, а для различных значений информационного параметра - между 2 и 8 (J3,-3;J52-5). Процесс телеизмерения протекает следующим образом. Вначале до измерения параметра по сигналам телеуправления преобразовывают нулевой и опорный сигналы в частотно-модулированные сигналы, передают их по кабе-, лю и на поверхности после преобразования числа периодов частотно-модулированных сигналов за определенный интервал времени в цифровые коды, последние запоминаются. При измерении параметров непрерывно за определенный интервал времени, начало которого определяется щагом квантования по глубине, а. крнец - корректируемым временным интервалом, производят преобразование числа периодов частотно-модулированного сигнала в цифровой код (фиг. 1,г). Этот цифровой код далее корректируется по запомненному значению цифрового кода, соответствующего нулевому сигналу (фиг. 1 д), и затем регистрируется цифровым регистратором (фиг. 1,е) или после цифроаналогового преобразователя регистрируечся аналоговым регистратором (фиг. 1,ж) Откорректированный код опорного сигнала (фиг. 1,д) управляет формированием конца временного интервала преобразования. Блок-схема телеизмерительной системы (фиг. 2), реализующая предлагаемый способ, включает скважинную-аппаратуру, содержащую коммутатор I, управляемый блоком 2, источник 3 опорного сигнала, источник 4 нулевого сигнала, усилитель 5, частотный модулятор 6, усилитель 7 мощности. линию 8, наземную аппаратуру, содержащую фильтр 9, ключ 10, время-задающее устройство J1, преобразователь 12, коммутатор 13, блок 14 управления, блок 15 управления временным интервалом, блок 16 памяти нулевого сигнала, блок 17 корректировки, кода, блок 18 формирования шагов квантования по глубине, цифровой регистра-тор 19, цифроаналоговый преобразователь 20 и аналоговый регистратор 21. -- Принцип действия телеизмерительной системы сводится к следующему. Вначале по сигналам управления от блока 14 коммутаторы 1 и 3 последовательно устанавливаются в положения измерения нулевого и опорного сигнала. При этом сигналы Uo и и он от источников 3 опорного сигнала и нулевого сигнала 4 поступают на усилитель 5 и в частотный модулятор 6 произв0дится частотная модуляция несущей час.тоты fo этими сигналами. Частотно-модулированные сигналы fo и fo +Д f тех после усиления по мощности в усилителе 7 мощности через линии связи поступают на фильтр 9 и далее на ключ 10. Ключ 10 открывается сигналом блока 18 и закрывается сигналом время-задающего устройства 11. Преобразователь 12 преобразует число периодов fo и затем fo-bAfmax в цифровые коды, которые коммутатором 13 распределяются в блок 16 памяти нулевого сигнала и блок 15 управления временным интервалом. Блок 15 управляет временным интервалом, формируемым время-задающим устройством 11. Код в блоке 15 корректируется по коду нулевого сигнала от блока 16. При измерении коммутаторы 1 и 13 устанавливаются соответственно в положение связи с ,зондом и блоком 17 корректировки. Теперь измеряемый сигнал U J после усиления усилителем 5 поступает на частотный модулятор 6 и частотно-модулированный сиг нал f +Д f усиливается усилителем 7 MOUJ,ности и поступает в линию 8 связи. После фильтра 9 через ключ 10 сигналы частоты преобразуются преобразователем 12 в-цифровой код, который поступает в блок 17 корректировки, на который также подается цифровой код, соответствующий нулевому сигналу, от блока 16. Откорректированный код с блока 17 подается на цифровой регистратор 19 и через цифроаналоговый преобразователь 20 на аналоговый регистр атор 21. Если в процессе измерения необходимо произвести корректировку передаточной характеристики телесистемы, то сигналом от блока 14 вновь переводятся коммутаторы 1 и 13 в положение измерения нулевого и опорного сигнала. При этом сигнал от блока 14 очищают ячейки памяти блоков 15 и 16 от запомненных ранее кодов и в блоке 15 и 16 вводятся новые значения кодов нулевого и опорного сигналов. Далее коммутаторы 1 и 13 переводятся в режим измерения параметра. Так как временные интервалы преобразования частотно-модулированного сигнала в цифровой код при реальных частотах несущих (от 7 кГц до 45 кГц) составляют несколько миллисекунд, то калибровка аппаратуры по Uo и Uon может производиться без перерыва каротажа. Предлагаемый способ телеизмерения реализуется и для одновременного телеизмерения нескольких параметров на нескольких несущих частотах. Но при этом временной интервал преобразования для каждого следующего после самого низкочастотного канала (при одинаковом индексе модуляции) выбирается, исходя из принятого для первого канала временного интервала, уменьщенного во столько раз, во сколько нулевая частота данного канала больше нулевой частоты самого низкочастотного канала. Преимущества .предлагаемого способа в данной аппаратурной реализации заключаются в отсутствии необходимости длительной регулировки и настройки аппаратуры, как это делается сейчас при использовании аппаратуры КСП-1, КСП-2 и новой аппаратуры КСП-3. Кроме того, повыщается точность измерения и отсюда увеличивается динамический диапазон измерения. Это позволит наряду с больщим техническим эффектом, заключающимся в повыщении точности измерения, получить и существенный экономический эффект за счет сокращения времени на подготовку аппаратуры к измерению. Формула изобретения 1. Способ телеизмерения скважинных геофизических параметров, состоящий в переиещении измерительного устройства по стволу скважины, преобразовании физических свойств горных пород в электрические сигналы, частотной модуляции этими сигналами высокочастотной.., несущей, передаче частотно-модулированных сигналов по каналу связи на поверхность, приеме и регистрации на поверхности информационного сигнала с частотной демодуляцией сигнала и формировании сигналов щагов квантования по глубине, отличающийся тем, что, с целью повыщения точности и расщирения динамического диапазона измерения параметров, периодически по Сигналам управления модулируют по частоте нусущую нулевым и опорным сигналами, при демодуляции за определенный интервал времени преобразуют число волн частотно-модулированного сигнала в цифровой код, причем сигнал начала временного интервала формируют по сигналам, характеризующим щаги квантования по глу15ине, сигнал конца временного интервала периодически корректируют по данным цифрового кода, соответствующего опорному сигналу, а текущий информационный сигнал в цифровом коде непрерывно корректируют по цифровому коду, соответствующему нулевому сигналу. 2. Способ по п. 1, отличающийся тем, что5 при многоканальном телеизмерении и передаче информации на нескольких несущих интервалах времени преобразования в каждом канале устанавливают в соответствии с отнощением частот несущих и индексов дуляции. Источники информации, принятые во внимание при экспертизе I. Комаров С. Г. Геофизические методы исследования скважин, М., «Недра 1973, с. 71-80. 2.Комаров С. Г. Геофизические методы исследования скважин , М., Гостоптехиздат , 1963, с. 50-56. 3.Комаров С. Т. Геофизические методы исследования скважин , М., «Недра, 1973, с. 90-95. S SaSSmfe r rtr yiriii fff
Ф к зон л/ Риг г ИЙЯ. -.. - W4«l-- J-«l«««fc 4- iW « .
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ПО КАРОТАЖНОМУ КАБЕЛЮ | 2009 |
|
RU2455697C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ГЕОАКУСТИЧЕСКОГО КАРОТАЖА | 2010 |
|
RU2445653C2 |
| Аппаратура для каротажа скважин | 1981 |
|
SU949612A1 |
| УСТРОЙСТВО АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН | 1996 |
|
RU2096812C1 |
| Комплексная промыслово-геофизическая аппаратура | 1984 |
|
SU1293688A1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2013 |
|
RU2533105C1 |
| Многоканальное промыслово-геофизическое устройство | 1984 |
|
SU1287073A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| Многоканальная аппаратура для каротажа скважин (ее варианты) | 1982 |
|
SU1024859A1 |
| Способ передачи информации от скважинного прибора к наземной аппаратуре | 1980 |
|
SU985269A1 |