Изобретение относится к радионавигационным системам (РНС), предназначенным для определения координат места подвижных обьектов.
Цель измерений повышение безопасности проводки судов в прибрежной полосе, реках и узких каналах, полетов по сложным трассам и т.п. РНС подразделяются [1] на системы дальней навигации (например, Лоран-А, Лоран-С, Омега), средней (Дека, Пирс-1) и ближней. Все более широкое применение находят спутниковые радионавигационные системы (СРНС), которые отличаются тем, что их опорные точки не фиксированы на земной поверхности, а закономерно движутся в околоземном пространстве (Транзит, Навстар). Упомянутые системы относятся к широко применяемым гиперболическим РНС, которые классифицируются по способу определения навигационного параметра:
фазовые, использующие зависимость фазы несущих колебаний от расстояния (Дека, Омега);
импульсные (временные), использующие зависимость продолжительности распространения радиоволн от расстояния (Лоран-А);
частотные, использующие зависимость частоты несущих или модулированных колебаний от скорости изменения расстояний (Транзит, Навстар).
Суть гиперболического метода это измерение в точке приема разности расстояний или фаз от когерентных источников двух опорных станций. По разности этих параметров выявляют изолинию гиперболу положения. Проведя аналогичные измерения для двух других станций, получают две гиперболы и более. В точке их пересечения определяют место судна: таблично-графическим способом или посредством специальных радионавигационных карт. Синхронность всех опорных станций по фазе и времени излучения сигналов ведется относительно всемирного времени. Точность конечных измерений во многих случаях оказывается гораздо ниже потенциальной точности используемых РНС из-за целого ряда сложно учитываемых факторов:
условий расспространения поверхностных и пространственных радиоволн в различное время суток (в ночное время погрешности возрастают в 2-8 раз) и сложностью их разделения;
зависимостью удаленности от опорной станции (при увеличении дальности в 2-3 раза средние квадратичные ошибки возрастают в 5-10 раз) [1, с. 213]
отклонений скорости распространения радиоволн от номинальной в зависимости от подстилающей поверхности.
Соотношение энергии поверхностных и пространственных радиоволн, где последние являются дестабилизирующим фактором, один из основных источников погрешности. С этим связана тенденция снижения частоты радиоизлучений (например, в РНС Омега рабочие частоты 10 14 кГц), обеспечивая большую стабильность поверхностных радиоволн, на которые ориентированы все радионавигационные карты и таблицы. Приведенные нестабильности, ограничивающие точность измерения координат, устраняются посредством многочисленных поправок, излагаемых в специализированных таблицах и справочниках. Выбор правильного типа поправки представляет значительные трудности, что и является причиной систематических ошибок в определении места. К недостаткам известных систем (применительно к сложным задачам ближней навигации) следует отнести: 1) низкую точность и надежность определения места; 2) необходимость в специальных картах и таблицах, сложности аналитических вычислений; 3) низкую частоту повторяемости измерений; 4) стационарность и высокую стоимость аппаратуры единой синхронизации, не позволяющую оптимальным образом, исходя из специфики трассы, разместить необходимое число опорных станций; 5) ограниченные возможности известных РНС вследствие алгоритмического деления на ведущего и ведомых (за исключением РНС Омега), не позволяющие использовать для измерения (с целью повышения числа линий положений) разность колебаний любых станций; 6) уязвимость систем и ограниченность доступа в случае военного конфликта.
Принимая во внимание перечисленные недостатки, сформулируем основные требования к перспективной РНС:
всепогодность;
удовлетворение потребностей неограниченного числа пользователей;
высокая точность и надежность результатов измерения;
непрерывная автоматическая обсервация места судна, простота обслуживания и объема информации;
отображение места судна непосредственно в географических координатах, что позволит обходиться без специализированных радионавигационных карт и таблиц;
возможность безлоцманской автоматизированной проводки судов и документирование ее точности;
модульность элементов РНС, позволяющая компоновать как глобальные сети, так и структуры ограниченного пользования (закрытые от постороннего доступа);
низкая аппаратурная стоимость и минимальные эксплуатационные расходы.
Приведенный перечень требований частично обеспечивается известными системами. РНС, предназначенная для решения сложных задач ближней навигации, по принципу действия относится к импульсно-фазовым системам. Этот же принцип реализован в РНС Лоран-С, используемой в качестве прототипа. Цепочка РНС Лоран-С состоит из одной ведущей и трех-четырех ведомых станций. Все станции работают на одной и той же частоте f 100 кГц, радиоволны которой хорошо распространяются вдоль земной поверхности. Ведущая станция периодически со строго синхронизованной частотой излучает сигналы. Ведомые станции принимают эти сигналы и с вполне определенными задержками (для каждой ведомой) излучают свои сигналы. Работа РНС Лоран-С основана на измерении в точке приема промежутка времени между моментами прихода импульсов от ведущего и ведомого радиоизлучателей и разности фаз высокочастотных колебаний, заполняющих импульсы. Импульсный метод измерения разности расстояний используется для грубого определения места судна и устранения многозначности, а фазовый метод - для определения линий положения с высокой точностью. Целое число периодов несущей частоты определяется однозначно, если ошибка измерения Δtи импульсным методом (по огибающей) будет меньше ±0,5•Т, что составит Δtи5 мкс [1, с. 217] То есть для разрешения неоднозначности используется одиночный импульс, подверженный воздействию помехи. По всем канонам теории и практики статистических испытаний доверительная вероятность такой оценки весьма низка. Кроме того, вышеприведенный перечень недостатков известных РНС относится и к Лоран-С.
Таким образом, ни одна из известных РНС не обеспечивает приемлемой безопасности ближней навигации подвижных объектов на сложных маршрутах.
Поставленная цель реализуется РНС, состоящей из упорядоченной сети станций ретрансляторов с фиксированными параметрами и приемников вычислителей, совмещенных с подвижными объектами. Каждая станция содержит последовательно соединенные блок антенны, первый коммутатор, вторым входом соединенный с усилителем мощности, согласованный радиоприемник и блок ввода информационных параметров, вторым входом соединенный с первым выходом синхронизатора. Второй выход синхронизатора через последовательно включенные блок параметров служебных сигналов, второй коммутатор, вторым входом соединенный с третьим выходом синхронизатора, блок кодирования и модулятор, вторым входом через первый дискретный делитель частоты подключенный к выходу генератора стабильной частоты. Выход первого дискретного делителя частоты одновременно соединен с первым входом синхронизатора, четвертый выход которого через последовательно соединенные счетчик и дешифратор подключен к второму входу синхронизатора, пятым выходом соединенного с третьим входом первого коммутатора. Второй вход счетчика и третий вход синхронизатора подключены к выходу формирователя импульсов счета. Дополнительно к выходу генератора стабильной частоты подключены последовательно соединенные блок коррекции фазы, второй дискретный делитель частоты, фазовый дискриминатор, вторым входом через активный полосовой фильтр подключенный к выходу первого коммутатора, и ключ, выходом соединенный с вторым входом блока коррекции фазы. Выход второго дискретного делителя частоты одновременно соединен с входом формирователя импульсов счета и через третий коммутатор, вторым и третьим входами соединенный соответственно с выходом модулятора и шестым входом синхронизатора подключен к входу усилителя мощности. При этом выход фазового дискриминатора через последовательно соединенные АЦП и первый регистр, вторым входом подключенного к седьмому выходу синхронизатора, соединен с третьим входом второго коммутатора, четвертый вход которого через формирователь переменных параметров, вторым входом подключенного к восьмому выходу синхронизатора, соединен с выходом блока ввода информативных параметров. Второй вход ключа и третий вход первого регистра соединены с девятым выходом синхронизатора, четвертый вход которого соединен с обнаружителем служебных сигналов входом подключенного к выходу согласованного радиоприемника, одновременно через схему сравнения вторым входом подключенной к выходу второго регистра, соединенного с пятым входом синхронизатора.
Приемник вычислитель РНС содержит последовательно соединенные блок антенны, согласованный радиоприемник, блок регистров хранения констант, вторым входом подключенный к первому выходу синхронизатора, вычислитель дальностей, вторым входом соединенный с вторым выходом синхронизатора, вычислитель координат и блок фиксации координат. Второй выход синхронизатора одновременно подключен к второму входу вычислителя координат и к первому входу оптимизатора выбора станции, вторым входом подключенного к выходу вычислителя дальности. Первый выход оптимизатора выбора станции через первый блок регистров соединен с третьими входами вычислителя координат и вычислителя дальностей, четвертый вход которого через последовательно включенные второй блок регистров и счетчик временных интервалов подключен к выходу генератора стабильной частоты, одновременно соединенного с первым выходом синхронизатора. Выход согласованного радиоприемника через блок сравнения кодов соединен с вторым входом синхронизатора, третий выход которого подключен с вторым входом синхронизатора, третий выход которого подключен к второму входу второго блока регистров. Второй и третий выходы оптимизатора выбора станции соответственно подключены к второму входу блока сравнения кодов и блоку памяти параметров станций, вторым входом соединенного с четвертым выходом синхронизатора, а выходом к третьему входу оптимизатора выбора станции и второму входу первого блока регистров. К выходу блока антенны подключены последовательно соединенные активный полосовой фильтр и фазовый дискриминатор, вторым входом подключенный к выходу дискретного делителя частоты, выход которого через последовательно соединенные формирователь импульсов сброса и логическую схему И подключен к второму входу счетчика временных интервалов и к третьему входу второго блока регистров. Дополнительно, выход согласованного pадиоприемника через обнаружитель служебных сигналов соединен с третьим входом синхронизатора и через третий блок регистров, вторым входом подключенный к пятому выходу синхронизатора, соединен с пятым входом вычислителя дальностей. К выходу фазового дискриминатора подключены последовательно включенные АЦП и четвертый блок регистров, вторым входом соединенный с шестым выходом синхронизатора, а выход четвертого блока регистров подключен к шестому входу вычислителя дальностей. К выходу фазового дискриминатора подключены последовательно соединенные ключи и блок коррекции фазы, включенный между выходом генератора стабильной частоты и входом дискретного делителя частоты. Вторые входы ключа и логической схемы И соединены с седьмым выходом синхронизатора, восьмой выход которого подключен к третьему входу логической схемы И. Выход формирователя импульса сброса соединен с четвертым выходом синхронизатора и через последовательно включенные второй счетчик, вторым входом соединенный с девятым выходом синхронизатора, и дешифратор подключен к пятому выходу синхронизатора.
Кроме того, вычислитель дальностей дополнительным входом соединен с выходом блока фиксации координат, а дополнительные входы вычислителей координат и дальностей соединены с источником сигнала Ho.
На фиг. 1 представлена функциональная схема опорной станции (1 блок антенны, 2 первый коммутатор, 3 усилитель мощности, 4 согласованный pадиоприемник, 5 блок ввода информационных параметров, 6 синхронизатор, 7 блок параметров служебных сигналов, 8 второй коммутатор, 9 блок кодирования, 10 модулятор, 11 первый дискретный делитель частоты (fh), 12 генератор стабильной частоты, 13 счетчик, 14 дешифратор, 15 формирователь импульса счета, 16 блок коррекции фазы, 17 второй дискретный делитель частоты (fo), 18 фазовый дискриминатор, 19 активный полосовой фильтр (частоты Fo), 20 ключ, 21 третий коммутатор, 22 аналогоцифровой преобразователь (АЦП), 23 первый регистр (хранение фазовой невязки), 24 формирователь переменных параметров, 25 - обнаружитель служебных сигналов, 26 схема сравнения, 27 второй регистр (хранение кода станции)).
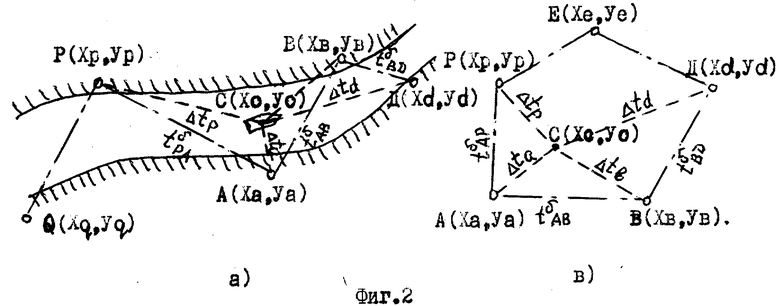
Варианты "развертки" опорных станций представлены на фиг. 2, где a - протяженная трасса, в площадная трасса. Здесь t
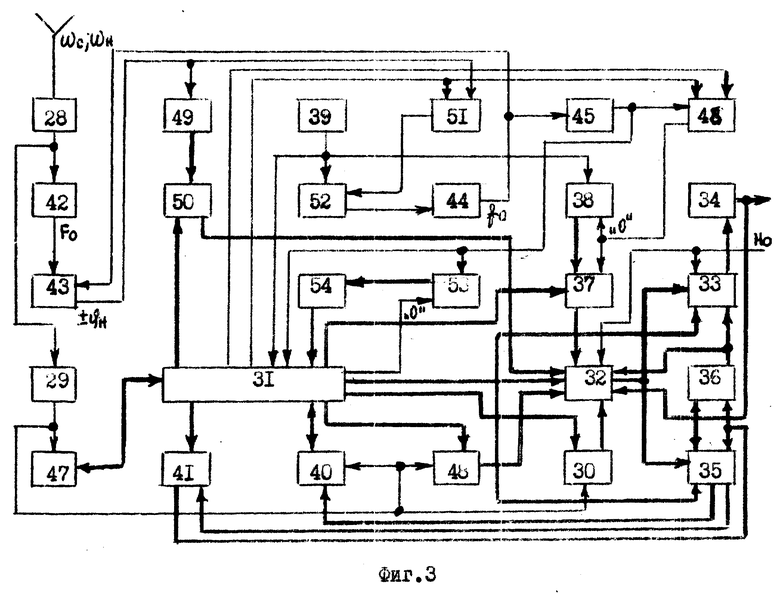
На фиг. 3 представлена функциональная схема приемника- вычислителя РНС (28 блок антенны, 29 согласованный pадиоприемник, 30 блок регистров хранения констант, 31 синхронизатор, 32 вычислитель дальностей, 33 - вычислитель координат, 34 блок фиксации координат, 35 оптимизатор выбора станций, 36 первый блок регистров (хранение параметров опорных станций), 37 второй блок регистров (хранение временных интервалов измерения), 38 счетчик временных интервалов, 39 генератор стабильной частоты, 40 блок сравнения (кодов станции), 41 блок памяти параметров станций, 42 активный полосовой фильтр частоты Fo, 43 фазовый дискриминатор, 44 - дискретный делитель частоты fo, 45 формирователь импульса сброса, 46 логическая схема И, 47 обнаружитель служебных сигналов, 48 третий блок регистров (хранение базовых невязок опорных станций), 49 аналого-цифровой преобразователь (АЦП), 50 четвертый блок регистров (хранение фазовых невязок приемника-вычислителя), 51 ключ, 52 блок коррекции фазы, 53 второй счетчик, 54 дешифратор).
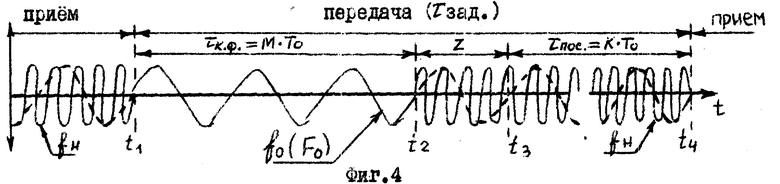
Эпюра напряжения активного режима "передача" представлена на фиг. 4.
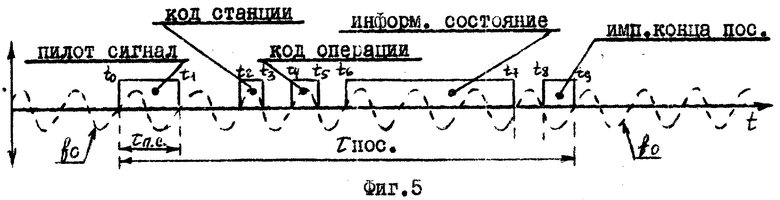
На фиг. 5 приведен один из вариантов структуры временной привязки к частоте fo, показанной пунктирной линией, составляющих информационной pадиопосылки.
Демонстрационная эпюра, отражающая временные соотношения в опорных точках P, A, B, D и месте измерения C (Xo, Yo), представлена на фиг. 6. Здесь t
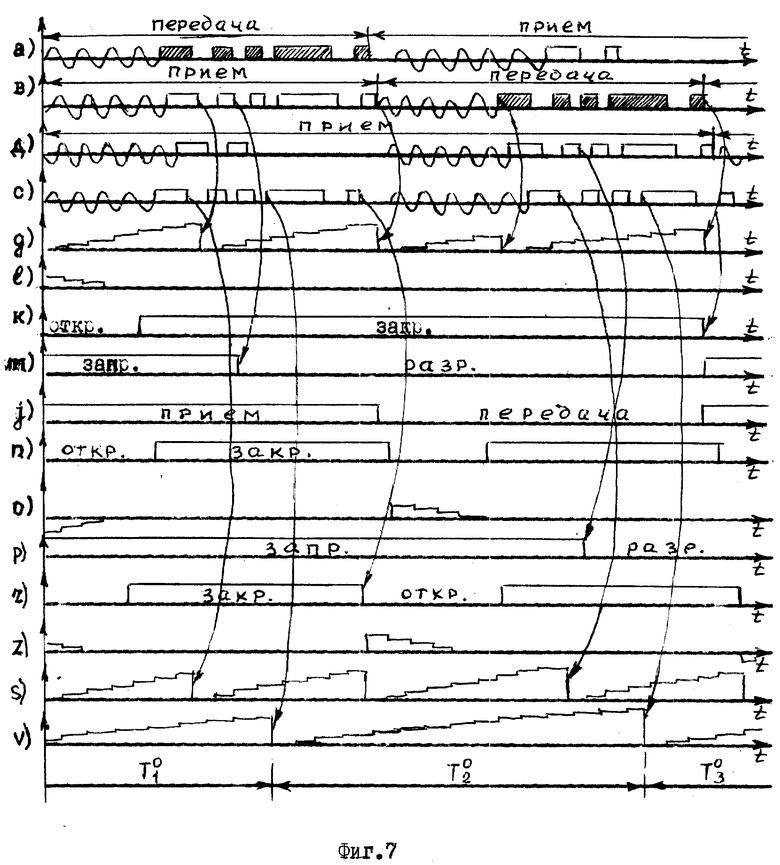
На фиг. 7 представлены эпюры напряжений, поясняющие работу блоков опорных станций B, D и приемника-вычислителя C (a, b, d сигналы в зонах опорных станций A, B, D; c сигналы в месте приема C; g графическое отображение состояния счетчика 13 (ст. B); l напряжение на выходе фазового дискриминатора 18 (ст. B); k сигнал управления ключем 20 (ст. B); m - триггер фиксации обнаружения кода (в составе синхронизатора 6 ст. B); j - триггер коммутации режимов "Прием-Передача" (в составе синхронизатора ст. B); сигнал управления ключом 20 (ст. D); o напряжение на выходе фазового дискриминатора 18 (ст. D); p триггер фиксации обнаружения кода (в составе синхронизатора ст. D); r сигнал управления ключом 5 (прием. C); z - напряжение на входе фазового дискриминатора 43 (прием. C); s графическое отображение состояния второго счетчика 53 (прием. C); v графическое отображение состояния счетчика 38 временных интервалов (прием. C).
При разработке системы исходили из двух основополагающих концепций: 1) сведение к минимуму количества различных поправок к определению места судна вплоть до их полного исключения; 2) дальность действия опорных станций (зона уверенного обслуживания) не должна превышать величин, обеспечивающих требуемые точности решения основной задачи независимо от времени суток и случайных факторов.
Эти положения, ограничивающие максимально допустимое расстояние между опорной станцией и объектом, устанавливают, что для обеспечения точной навигации число опорных станций должно быть большим, а их размещение - определяться спецификой решаемой задачи. В этом случае рентабельность использования РНС может быть оправдана ее высокой эффективностью при низкой аппаратурной и эксплуатационной стоимости. Последние обеспечиваются лишь при безусловном отказе от дорогостоящей единой системы синхронизации, избегая неоправданного усложнения, и существенном снижении номинальной мощности станции. Логическая рациональность системы определена спецификой задач ближней навигации, где регламентируемые зоны действия достаточно четко ограничены. Например, узкая прибрежная полоса достаточно большой протяженностью, трассы воздушного флота в условиях пересеченной местности либо в зоне концентрации высотных объектов, речные водные пути типичные случаи протяженных трасс со сложной конфигурацией.
В РНС использован принцип ретрансляции сигнала маломощными станциями, что обеспечивает целенаправленное расширение области (протяженной или площадной) функционирования системы (фиг. 2). При этом практически исключается дестабилизирующее влияние пространственных pадиоволн вследствие сравнительно небольших расстояний, наличия временной задержки ретрансляции и дискретности излучений. Трасса ретрансляции может задаваться внутренними программами станции или станцией-диспетчером, имеющей канал связи с персональной ЭВМ, обеспечивающей запуск системы, контроль функционирования и управление (коррекция трассы). Опорный сигнал на протяженной трассе может быть однонаправленным или реверсироваться (непрерывно или с заданным дискретом) на концах трассы, обеспечивая диспетчера информацией о функционировании системы.
Основными блоками РНС являются генераторы стабильной частоты. В [2] приводятся структуры термостатированных кварцевых генераторов с кольцом ФАПЧ, обеспечивающие нестабильность частоты Δf /fr 10-9 - 10-11. Более высокую стабильность (10-12 10-14) реализуют различные типы квантовых генераторов. Алгоритм системы, структурные реализации опорных станций и приемников-вычислителей, имеющие много идентичных блоков (для удобства восприятия номера блоков приемников будут указаны в скобках), позволяют при нестабильностях генераторов 12(39) Δf/fr 10-8 получать высокие точности измерения, минимизируя статические и случайные погрешности, обусловленные:
временной задержкой обнаружения опорного сигнала;
временной нестабильностью задержки ретрансляции;
пространственными флюктуациями фазы pадиоволны.
Это обеспечивается формированием двух частот: опорной fo (измерительной) и несущей fh (информационной). Опорная частота fo выделяется на выходе второго дискретного делителя 11, где fh (101 104)•f0. Реализация дискретных делителей 11, 17(44) на жесткой цифровой логике (счетчиках) обеспечивает временную стабильность принятого соотношения частот. Станция трассы ретрансляции поочередно (в соответствии с адресным указанием) из пассивного режима "Прием" переходят в активный режим "Передача" (фиг. 4), последовательно во времени излучая в эфир опорную чистоту fo и информационную радиопосылку с несущей частотой fh. Переключение режимов обеспечивает третий коммутатор 21, управляемый синхронизатором 6. Частота fo активной станции на временном интервале t1-t2 излучения принимается за временный эталон Fo, относительно которого блоки 16 пассивных станций и соответствующие блоки (52) приемников-вычислителей, находящиеся в зоне досягаемости, корректируют фазы внутренних опорных частот fo. Длительность интервала коррекции (t1-t2, фиг. 4) определяется номинальным быстродействием цепи автоподстройки. Активная станция задает интервал коррекции τк.ф., равным целому числу периодов опорной частоты M•To, фиксируемого на соответствующем выходе дешифратора 14. Выделение расcогласования фаз относительно частоты Fo временного эталлона с выходов полосовых фильтров 19(42) производится фазовыми дискриминаторами 18(43), а временное стробирование ключами 16(51), управляемых синхронизаторами 6(31). Несложно обеспечить управление ключами 16(51) условием целевого (выборочного) стробирования. Это позволяет избежать целочисленных погрешностей коррекции фазы в стационарном цикле ретрансляции, вследствие ограничений, накладываемых фиксированным временным интервалом автоподстройки. Априорная информация о величине M позволяет блокам синхронизаторов пассивных станций и приемников-вычислителей исключить сбой в работе системы досрочным прерыванием режима коррекции (закрытием ключей 16, 51). Реален вариант задания безопасного интервала коррекции подсчетом числа циклов (периодов) на выходах полосовых фильтров 19(42). В синхронизаторах 6(31) логическими элементами формируются сигналы запрета продолжения анализа, если кодовый адрес (t2-t3, фиг. 5) входной pадиопосылки не соответствует ожидаемому (или ожидаемым для приемников-вычислителей). В режиме "Передача" на временном t2-t4 (фиг. 4) с несущей fh частота fo обеспечивает жесткую временную привязку информационной pадиопосылки фиксированной деятельности ( τ K•To, где K целое число). Один из вариантов структуры и временной привязки к опорной частоте fo представлен на фиг. 5. Совмещением временных границ составляющих pадиопосылки с фиксированной фазой (0o, 180o) опорной частоты fo (выделена на фиг. 4 и 5 пунктиром) достигается стабильность формирования и считывания информации. Аппаратно достаточно просто обеспечивается фиксированный временной сдвиг начала формирования t3 информационной pадиопосылки от момента включения t2 несущей частоты fh. Это позволяет исключить влияние переходных процессов в цепях согласованных pадиоприемников 4(29) на оценку обнаружения пилот-сигнала pадиопосылки. Не исключается возможность внесения в информационные радиопосылки дополнительных сведений, например, собственных параметров станции (кода, координат), кодирующих величин и т.п. Этому способствует алгоритм системы, не ограничивающий соотношения частот fh/fo, от которого зависит информационная емкость фиксированной временной длительности t. Информация о коде станции заложена во втором регистре 27. Введением дополнительных связей возможно изменение кода станции диспетчером, если возникнет необходимость ограничить или закрыть доступ к системе. Совместными усилиями схемы сравнения 26 и синхронизатора 6, который анализирует сигнал блока 26 на временном интервале t2 t3 (фиг. 5), производится опознание принятого кода. В активном режиме, когда вход согласованного приемника 4 станции блокирован, обнуление счетчика 13 производится синхронизатором 6 в моменты фиксации цифровых кодов чисел M и (K + z). Таким образом, длительность режима "Передача" определяется условием: tзад. (К + Z + M)•То, где z число (0, 1, 2, 3,), определяющее временной сдвиг начала информационной pадиопосылки. Режим "Передача" обеспечивается первым коммутатором 2: блокируются входы согласованного pадиоприемника 4 и полосового фильтра 13, а сигнал с усилителя мощности 3 поступает в блок антенны 1.
Априорная информации о длительности пилот-сигнала ( τп.с. ) и временной привязке его фронтов к фиксированным фазам (0o, 180o) опорной частоты fo существенно упрощает требования к реализациям согласованного pадиоприемника 4(29) и обнаружителя 25(47). Структура последнего упрощается и тем, что с синхронизатора 6(31) в него поступает информация о порядковом номере цикла (периода) опорного сигнала fo, снимаемая с выхода дешифратора 14(54). Вследствие этого допускается погрешность фиксации пилот-сигнала обнаружителем 25(47) в пределах всего импульса (при τп.с. To). Априорная информация о его временной привязке предоставляет возможность синхронизатору 6(31) использовать для точной фиксации совпадающий во времени импульс с выхода блока 15(45). Повышенная точность обеспечивается фиксацией и последующим учетом в вычислениях координат Xo, Yo объекта фазовой "невязки" частот fo опорных станций ( τ
Цифровое представление информации позволяет выбрать оптимальный способ его кодирования 9 (например, последовательный код, Манчестерский код и т.п. ). На наш взгляд, предпочтителен двойной Манчестерский код, который при любых комбинациях выходной информации не изменяет постоянной составляющей сигнала. Включением в состав согласованных pадиоприемников 4(29) соответствующих узлов обеспечивается декодирование входного сигнала. Не исключены специфические моменты, накладывающие ограничения, вследствие чего коэффициенты преобразований блоков кодирования и декодирования необходимо принять равными 1. Принимая во внимание насыщенность эфира помехами, помехоустойчивость информационного pадиоканала предпочтительно обеспечить использованием частотной модуляции в блоке 10, если решаемая задача не накладывает специфических ограничений на вид модуляции. При этом опорная частота fo, используемая для фазовых измерений, не модулируется.
Функциональная схема приемника-вычислителя (фиг. 3) имеет много общих блоков (28, 29, 39, 42, 43, 44, 45, 47, 49, 51, 52, 53 и 54) со структурой станции (фиг. 1). Это позволяет сократить описание работы ссылками на вышеприведенный текст. Информация о параметрах привязки всех станций трассы ретрансляции, заложенная в блоке памяти 41 приемников-вычислителей, выбирается по мере необходимости в первый блок регистров 36 формированием соответствующих адресов ячеек памяти 41. В число параметров привязки станций входят их координаты на местности X, Y и высоты антенн H. Величины последних складываются из двух составляющих: геодезических высот места и высот установки приемопередающих антенн. В реальных условиях кроме визуальной индикации вычисленных координат объекта Xo, Yo, желательна индикация кодов опорных станций из блока регистров 36. В сложных условиях это обеспечивает дополнительный контроль за достоверностью функционирования приемника-вычислителя.
Определим алгоритмические и аналитические соотношения, которые могут быть заложены в структуры специализированных блоков 32, 33. Решение задачи упрощено использованием аппарата вычислений на плоскости, а не на сфере. Такое упрощение допустимо, исходя из введенного ограничения ближняя навигация. Определим исходные данные задачи, используя для наглядности фиг.2 и 6: 1) известные параметры опорных станций A(Xa, Ya, Ha), B(Xb, Yb, Hb), D(Xd, Yd, Hd), P(Xp, Yp, Hp) и величину Ho приемника-вычислителя; 2) результаты измерения приемной системой временных интервалов T Аналогично вычисляются t
Аналогично вычисляются t
Решение задачи будем искать через вычисление дальностей Sa, Sb, Sd от объекта C (Xo, Yo, Ho) до опорных станций A, B, D. При фиксированной скорости распространения pадиоволны Vp/в величины дальностей зависят от Δtp, Δta, Δtb, Δtd времен прохождения фронта pадиоволны от объекта до соответствующих опорных станций P, A, B, D.
Запишем систему уравнений, связывающую приведенные временные параметры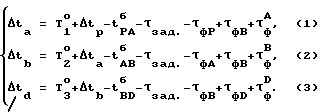
Здесь мы имеем систему из трех уравнений при четырех неизвестных, которая напрямую не может быть решена. В выражении (1) изначально неопределенной величине Δtp придается нулевое значение. Неопределенность Δtp вполне естественна, так как вычислитель не имеет временной опорной точки (отсутствие синхронизации с моментом pадиоизлучения станции P). Задача решается методом последовательного приближения (итераций). Вычислительное загрубление начальным условием Δtp 0, дающее приблизительные координаты  объекта, в последующих циклах измерений устраняется, так как Δtp вычисляется корректором приемника:
объекта, в последующих циклах измерений устраняется, так как Δtp вычисляется корректором приемника:
а результат подставляется в соответствующие выражения. Неопределенность Δtp автоматически устраняется, когда из трех опорных станций создается замкнутый цикл ретрансляции сигнала. Использование  является спецификой предложенного решения, которое не является единственно возможным, а потому этот частный случай вынесен в п.3 формулы.
является спецификой предложенного решения, которое не является единственно возможным, а потому этот частный случай вынесен в п.3 формулы.
Объединим все известные параметры уравнений (1)-(3), соответственно обозначив их через t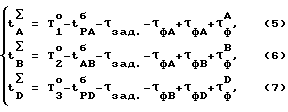
Тогда система уравнений (1)-(3) будет иметь вид: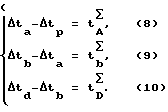
Отсюда найдем временные величины удаленности от опорных станций:
Преобразуем временные величины Δta, ΔTb, Δtd в метрические Sa, Sb, Sd удаленности от опорных станций:
Запишем систему уравнений модулей прямых, проведенных через две точки (параметры объекта и опорной станции):
где
ΔHa = Ho-Ha, ΔHb = Ho-Hb, ΔHd = Ho-Hd.
Из этой системы (13) определим значения Xo, Yo. Опуская промежуточные выкладки, запишем:
где
K2 = S
Определив численное значение Yo, подставим его в выражение (14) и вычислим значение Xo.
Приведенные выражения, отражающие достаточность условий для вычисления координат объекта Xo, Yo в прямоугольной ортодромической системе координат лишь один из вариантов решения (возможно не самый оптимальный с позиции минимизации вычислительного процесса). Известными преобразованиями [1, с. 213] обеспечивается переход к географическим координатам. Громоздкость вычислительных формул создает несомненные сложности их аппаратного обеспечения. Оптимальным решением является программная реализация вычислений на микропроцессорной основе. В структуре приемного устройства функционально выделены вычислитель 32 дальностей Sa, Sb, Sd и вычислитель 33 координат Xo, Yo, входы которых связаны с блоками исходных данных. В соответствии с представленными выше выражениями это блок памяти 41 параметров станций, второй блок регистров 37 хранения результатов измерений (T
Измерение временных параметров (T
Таким образом, описанная выше РНС Багис-А потенциально обеспечивает предельную точность измерения, ограниченную лишь аппаратурной и вычислительной погрешностью компонентов системы. Время одного цикла измерения зависит от протяженности трассы, числа станций ретрансляторов, опорной частоты fo и быстродействия вычислителей координат. Примем длину трассы l=500 км, которую обслуживают N станций ретрансляторов. Частоту fo примем равной 100 кГц (аналогично PHC Лоран-С). Длительность τзад. ограничивается величиной τзад. Рцик.• To, где Pцик.- число периодов, отводимых на режим "Коррекция" и формирование pадиопосылки. При Pцик. 100 имеем τзад. 1 мс. При N 50 суммарная задержка Σзад. 50 мс. Время прохождения pадиоволной всей трассы <2 мс. Отсюда частота обновления результатов измерения ≈ 20 Гц (если вычисление координат Xo, Yo объекта вписывается в интервал 50 мс). При скорости Vc судна 20 км/ч динамическая ошибка не превышает 0,5 м. Дискретность выходной информации может быть сглажена включением на выходе приемника-вычислителя блока экстраполяции координат (математический аппарат сплайн-функций позволяет с большой точностью описать любую траекторию). Оценим влияние на точность измерения доплеровского сдвига частоты (ДСЧ): ДСЧ ± fo • Vc/Vp/в≈±2 • 10 -3 Гц.
Тогда при τзад. 1 мс временная нестабильность не превысит 0,02 нс, что составит лишь 2 • 10-6 долю периода To (если ДСЧ оценить как нестабильность Δf /fг 2 • 10-8). Это настолько малая величина, что практически не сказывается на точности измерений. При этих условиях номинальная мощность типовых станций должна обеспечивать радиус действия ≈ 20 км, что легко реализуется портативными радиостанциями при хорошо оборудованной антенне. В такие же габариты вписываются и приемники-вычислители.
Отсюда несложно сделать выводы о реальной стоимости всего комплекса. Погрешностью длительности τзад. при нестабильностях генераторов Δf /fг 10-8 ввиду малости (≈ 0,01 нс) можно пренебречь. Для безлоцманской проводки судов достаточно иметь в бортовых устройствах памяти координаты опорной траектории фарватера. В этом случае не представляет технических сложностей документирование точности проводки судов. Информация о координатах опорной траектории должна предоставляться специализированной береговой службой надзора, чье инспектирующее судно имеет возможность при хорошей видимости точно пройти по предписанному фарватеру с фиксацией координат на магнитную ленту или диск. Впоследствие эта информация, многократно тиражируемая, вводится в электронную память судов.
Структурные реализации используемых блоков не нуждаются в пояснениях. Работа РНС наглядно поясняется эпюрами напряжений фиг.7. Предельная точность зависит от чувствительности и линейности фазовых дискриминаторов при малых рассогласованиях. Нелинейности при больших рассогласованиях не вносят ошибки, так как отрабатываются цепями автоподстройки. Выходной сигнал фазовых дискриминаторов 18(43) зависит от амплитуды входных сигналов, поэтому реализации активных полосовых фильтров 19(42) должны обеспечивать стабильность выходных сигналов введением узлов АРУ (см. примечание).
Реализации структур синхронизаторов 6(31) не представляют сложностей. Например, один из вариантов структуры синхронизатора 6 станции содержит 16 логических схем И, 2 логические схемы ИЛИ, 2 счетчика, блок памяти, дешифратор и 4 триггера. Эта громоздкая в электрическом представлении схема реализуется всего на 6-8 корпусах типовых микросхем.
П р и м е ч а н и е. Обеспечить высокую линейность дискриминационной характеристики блоков 18, 43 во всем диапазоне рассогласований достаточно сложно, поэтому не приводится вариант, допускающий исключение блоков коррекции фазы 16, 52 и 20, 51.
Источники информации
1. Лесков М.М. Баранов Ю.К. Гаврюк М.И. Навигация. М. Транспорт, 1986.
2. Справочник. Измерения в электронике./Под ред. В.А.Кузнецова. М. 1987.
3. Кондрюшин В.Г. Определение места судна. М. Транспорт, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| Тренажер-анализатор | 1979 |
|
SU856473A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2457629C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| ПРИЕМОИНДИКАТОР РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2027196C1 |

Настоящее изобретение относится к классу РНС, предназначенных для решения сложных задач ближней навигации. Это импульсно-фазовая система, использующая принцип ретрансляции опорного сигнала упорядоченной сетью станций с фиксированными координатами. Алгоритм системы, структурные реализации станций и приемников-вычислителей, совмещенных с подвижными объектами, позволяют при нестабильностях опорных генераторов Δf/f = 10-8 получать высокие точности измерения координат, исключая статические и случайные погрешности, обусловленные: временной задержкой обнаружения опорного сигнала; временной нестабильностью выдержки ретрансляции; пространственными флюктуациями фазы радиоволн. Это обеспечивается формированием двух частот, которые в активном режиме станции последовательно во времени излучаются в эфир. Приемники-вычислители по результатам измерения временных интервалов между опорными сигналами определяют дальности до опорных станций, которые пересчитываются в координаты места приема сигналов. РНС обеспечивает: всепогодность и обслуживание неограниченного числа пользователей системы; непрерывную автоматическую оценку координат места, простоту обслуживания и объема информации; возможность безлоцманской автоматизированной проводки судов по сложному фарватеру и документирования ее точности; возможность компоновки глобальных сетей, охватывающих большие территории, и структур ограниченного доступа; высокую точность и надежность измерения; низкую аппаратурную стоимость и минимальные эксплуатационные расходы, безоператорный режим эксплуатации. 2 з.п. ф-лы, 7 ил.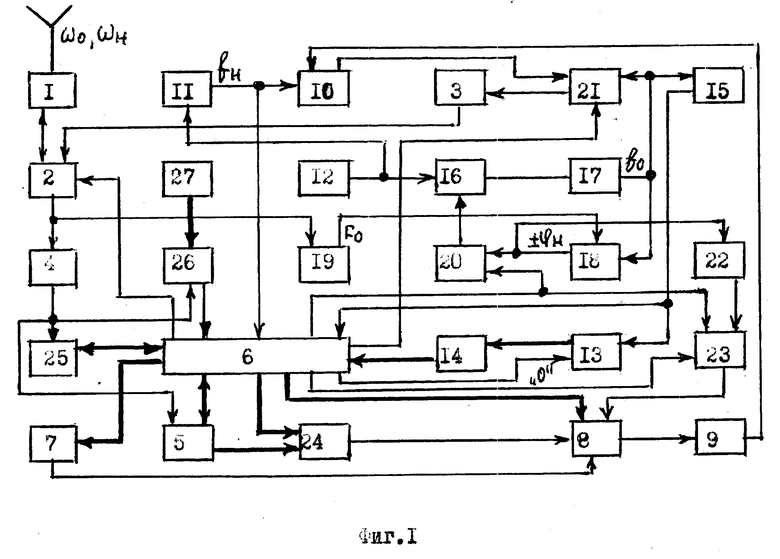
| Лесков М.М., Баранов Ю.К., Гаврюк М.И | |||
| Навигация | |||
| - М.: Транспорт, 1986, с | |||
| Кулиса для фотографических трансформаторов и увеличительных аппаратов | 1921 |
|
SU213A1 |
