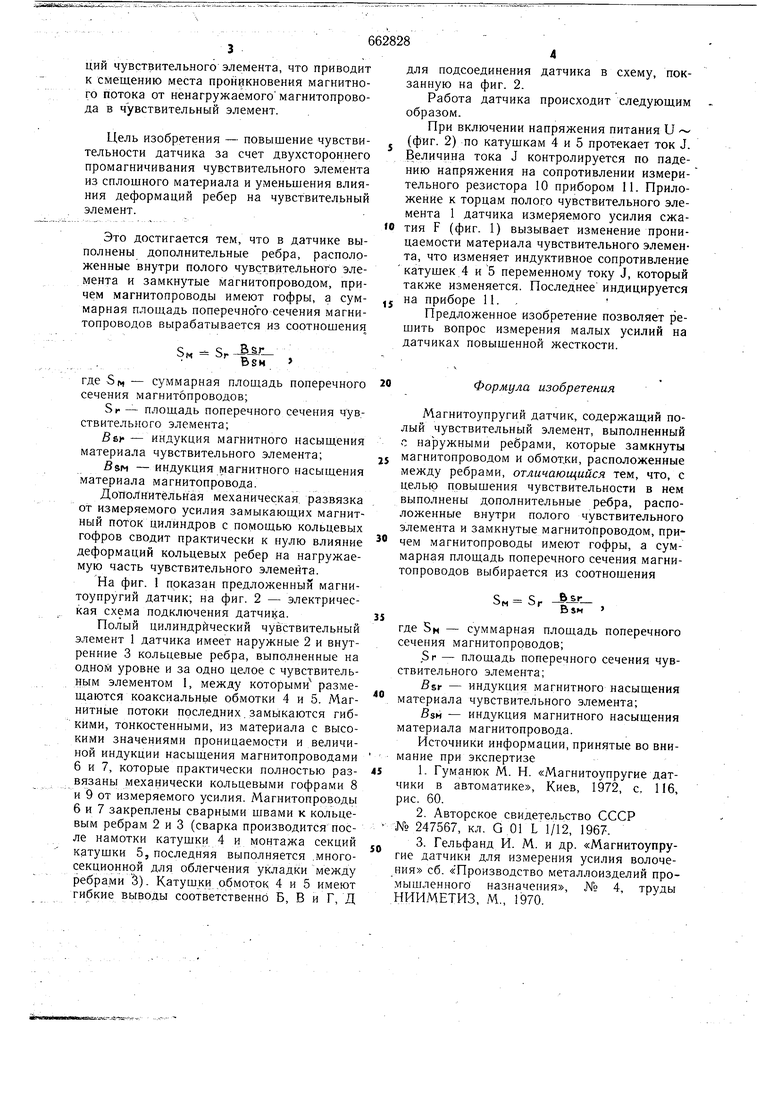
(54) МАГНИТОУПРУГИЙ ДАТЧИК ций чувствительного элемента, что приводит к смещению места проникновения магнитного потока от ненагружаемогомагнитопровода в чувствительный элемент. Цель изобретения - повышение чувствительности датчика за счет двухстороннего промагничивания чувствительного элемента из сплошного материала и уменьшения влияния деформаций ребер на чувствительный элемент. Это достигается тем, что в датчике выполнены дополнительные ребра, расположенные внутри полого чувствительного элемента и замкнутые магнитопроводом, причем магнитопроводы имеют гофры, а суммарная площадь поперечного сечения магнитопроводов вырабатывается из соотношения -5-if . где SM - суммарная площадь поперечного сечения магнитопроводов; Sr - площадь поперечного сечения чув.ствительного элемента; Bf,f - индукция магнитного насыщения материала чувствительного элемента; BSM -индукция магнитного насыщения материала магнитопровода. ДоггоЛнитёльная механическая, развязка от измеряемого усилия замыкающих магнитный поток цилиндров с помощью кольцевых гофров сводит практически к нулю влияние деформаций кольцевых ребер на нагружаемую часть чувствительного элемента. На фиг. 1 показан предложенный магнитоупругий датчик; на фиг. 2 - электрическая схема подключения датчи1 а. Полый цилиндрический чувствительный элемент 1 датчика имеет наружные 2 и внутренние 3 кольцевые ребра, выполненные на одном уровне и за одно целое с чувствительным элементом 1, между которыми размещаются коаксиальные обмотки 4 и 5. Магнитные потоки последних, замыкаются гибкими, тонкостенными, из материала с высокими значениями проницаемости и величиной индукции насыщения магнитопровода.ми 6 и 7, которые практически полностью развязаны механически кольцевыми гофрами 8 и 9 от измеряемого усилия. Магнитопроводы 6 и 7 закреплены сварными щвами к кольцевым ребрам 2 и 3 (сварка производится после намотки катушки 4 и монтажа секций катушки 5, последняя выполняется .многосекционной для облегчения укладки между ребрами 3). Катушки обмоток 4 и 5 имеют гибкие выводы соответственно Б, В и Г, Д в схему, покдля подсоединения датчика занную на фиг. 2. Работа датчика происходит следующим образом. При включении напряжения питания U (фиг. 2) по катушкам 4 и 5 протекает ток J. Величина тока J контролируется по падению напряжения на сопротивлении измерительного резистора 10 прибором 11. Приложение к торцам полого чувствительного элемента 1 датчика измеряемого усилия сжатия F (фиг. 1) вызывает изменение проницаемости материала чувствительного элемента, что изменяет индуктивное сопротивление катушек 4 и 5 переменному току J, который также изменяется. Последнее индицируется на приборе 11. , Предложенное изобретение позволяет решить вопрос измерения малых усилий на датчиках повышенной жесткости. Формула изобретения Магнитоупругий датчик, содержащий полый чувствительный элемент, выполненный с наружными ребрами, которые замкнуты магнитопроводом и обмотки, расположенные между ребрами, отличающийся тем, что, с целью повышения чувствительности в нем выполнены дополнительные ребра, расположенные внутри полого чувствительного элемента и замкнутые магнитопроводом, причем магнитопроводы имеют гофры, а суммарная площадь поперечного сечения магнитопроводов выбирается из соотношения s« Sr-|t, где SH - суммарная плошадь поперечного сечения магнитопроводов; Sr - площадь поперечного сечения чувствительного элемента; fisr - индукция магнитного насыщения материала чувствительного элемента; SSM - индукция магнитного насыщения материала магнитопровода. Источники информации, принятые во внимание при экспертизе 1.Гуманюк М. Н. «Магнитоупругие датчики в автоматике, Киев, 1972, с. 116, рис. 60. 2.Авторское свидетельство СССР № 247567, кл. G.01 , 1967. 3.Гельфанд И. М. и др. «Магнитоупругие датчики для измерения усилия волочения сб. «Производство металлоизделий промышленного назначения, № 4, труды НИИМЕТИЗ, М., 1970.
А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ КОАКСИАЛЬНЫЙ ЛАБИРИНТНЫЙ НАГРЕВАТЕЛЬ ЖИДКОСТЕЙ | 2015 |
|
RU2604963C2 |
| СПОСОБ БИФАКТОРНОГО ВОЗБУЖДЕНИЯ ФЕРРОЗОНДОВ И УСТРОЙСТВО МОДУЛЯТОРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2809738C1 |
| Магнитоупругий датчик давления | 1981 |
|
SU970151A1 |
| Магнитоупругий датчик давления | 1982 |
|
SU1111041A1 |
| Силоизмерительный датчик | 1979 |
|
SU1004780A1 |
| МАГНИТОУПРУГИЙ ДАТЧИК | 2005 |
|
RU2295118C1 |
| МАГНИТОУПРУГИЙ ДАТЧИК КРУТЯЩЕГО МОМЕНТА | 2001 |
|
RU2216000C2 |
| Магнитоупругий датчик усилия | 1991 |
|
SU1837165A1 |
| Устройство для измерения механических напряжений | 1978 |
|
SU763704A1 |
| Индукционный датчик | 1985 |
|
SU1372260A1 |

