(54) ТОКООГРАНИЧИВАЮЩЕЕ УСТРОЙСТВО


| название | год | авторы | номер документа |
|---|---|---|---|
| Токоограничивающее устройство | 1976 |
|
SU650123A1 |
| ТОКООГРАНИЧИВАЮЩИЙ АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 2007 |
|
RU2345435C1 |
| ТОКООГРАНИЧИВАЮЩИЙ АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 2007 |
|
RU2340031C1 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 1993 |
|
RU2115191C1 |
| КОНТАКТНАЯ СИСТЕМА ДЛЯ БЫСТРОДЕЙСТВУЮЩЕГО АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2008 |
|
RU2368975C1 |
| Штангоуловитель для токоприемников троллейбусов | 1967 |
|
SU422214A1 |
| Селективный токоограничивающий автоматический выключатель | 1978 |
|
SU752548A1 |
| Токоограничивающее устройство для автоматических выключателей | 1975 |
|
SU537405A1 |
| Селективно-токоограничивающий автоматический выключатель | 1980 |
|
SU907629A1 |
| Автоматический выключатель | 1974 |
|
SU531214A1 |

I
Изобретение относится к низковольтным электрическим аппаратам, в частности к автоматическим воздушным выключателям.
Известны токоограничивающие устройства, содержащие контактную, дугогасительную и магнитные системы, которые обеспечивают отброс подвижных контактодержателей, и ручной привод с защелкой, обеспечивающий фиксацию подвижных контактодержателей в разомкнутом положении и возврат их в замкнутое положение. Однако чувствительность таких устройств к токам аварийного режима недостаточно высока. Кроме того, может происходить как несогласованный отход контактодержателей подвижных контактов до упоров с последующей их фиксацией, так и неодинаковое их расхождение либо из-за неравномерной токовой нагрузки в аварийном режиме по фазам, либо из-за того, что параметры силовых цепей при аварийных режимах случайны в силу неопределенности места аварийной ситуации и ее характера, при этом не исключена возможность приварки контактов в отдельных фазах из-за того, что противодействующие усилия контактных пружин превосходят электродинамические силы отброса.
Известны также токоограничивающие устройства, содержащие установленные в изоляционном корпусе в каждом полюсе контактную и дугогасительную системы, причем подпружиненные контактодержатели подвижных контактов установлены с возможностью поворота на осях в плоскости, параллельной контактодержателям неподвижных контактов, гибкие проводники, выводные шины и механизм задержки, состоящий из регулируемого упора, пальца, собачки, которая одним своим концом установлена на оси контактодержателя подвижного контакта, а другим опирается на поверхность регулируемого унора, пружины кручения,установленной на той же оси, что и собачка, храповика, ус-тановленного с возможностью возвратно-вращательного движения, одна часть которого выполнена зубчатой, по крайней мере одного подпружиненного инерционного маховика, установленного на другой оси, и противодействующей пружины, которая одним своим концом прикреплена к маховику, а другим - к регулируемому упору. Эти токоограничивающие устройства также не обеспечивают одинаковой по длительности во времени задержки контактодержателей подвиж ньТхкЬнгакТов в отключенном положении с ёд у юЩй и о д нб в реме нн ы м и согл а с ов а н ШГ г воЗвратъм иX в замкнутое положение Независимо от величины их отброса.
Цель изобретения - обеспечение одина KOBoflTio Длительности во времени задержки кОнтактодержателей подЕ ижных контактов в ШШЧённоМТГолоЖении с последующим од 1тШр й йЯъТ1й:РгсОгласованным возвратом их в замкнутое .положение независимо от величины их отброса.
Это достигается тем, что в предлагаемом устройстве механизм задержки устано влен Вк6р 1тусё7 вь1п6лнённом в виде скрепленныхбоковин, и снабжен кулисой с криволиней ШШйШТ5 ТхЬпЪлййт еТ ьн ы м 11 а Л ь це MV п а л ь тГьТ жестко ззкреплены на маховике, а другая а тГ -ХраШТока выполненаС отверстием, в Мтбрбевведен один из пальцев маховика, другой палец при этом расположен в криволинейн сгм пазу кулисы, подвижно установленной на дополнительной оси, закрепленной в боковинах корпуса, в которых также зак рМлТйЬг ocbMaxcfBHKa,установленного с воз - 1й05«1ТОстЬЙ вращения вокруг своей оси, и - - регулируемый упор.
Механизм задержки может быть снабжен
дбггоЛййтельиым инерционным маховиком и
дополнительной кулисой с дополнительным
отверстием, установленной с возможностью
вращения на одной оси с указанной кулисой, Причем sfTa ось закреплена в обеих кулисах, а дополнительный инерционный маховик ус тайОв.тен с возможностью вра1Д енид на общей оси, что и указанный махоЪиЯ прилетом дополнительном маховике жестко закреплен другой палец, который расположён в отверстии дополнительной .кулисы.
ДбЧбЛйительное отверстие дополнитель.ной куписы может быть,выполнено в виде прямолинейногопаза.
Дополнительная кулиса может бы.ть вы- полнеНа в виде двух деталей, шарнирно связанных между собой, в одной из которых : - вьгПОлнено указанное дополнительное отверстие..
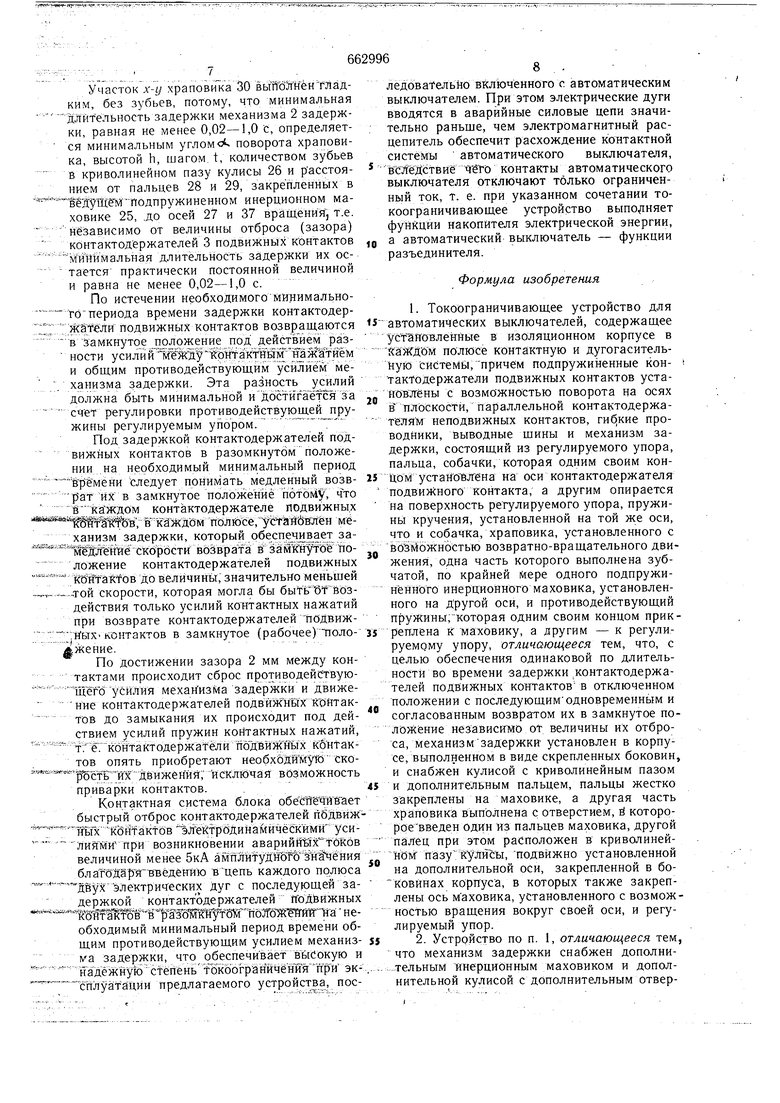
На фиг. 1 изображено описываемое токо ограничивающее устройство, разрез через
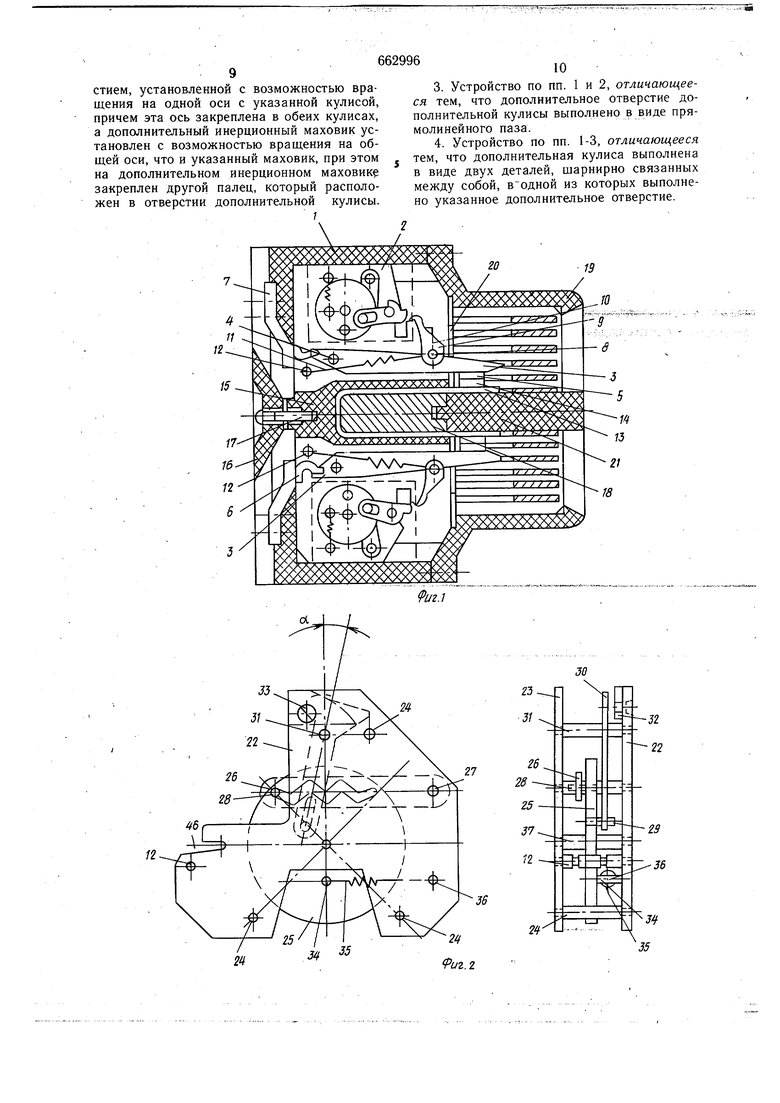
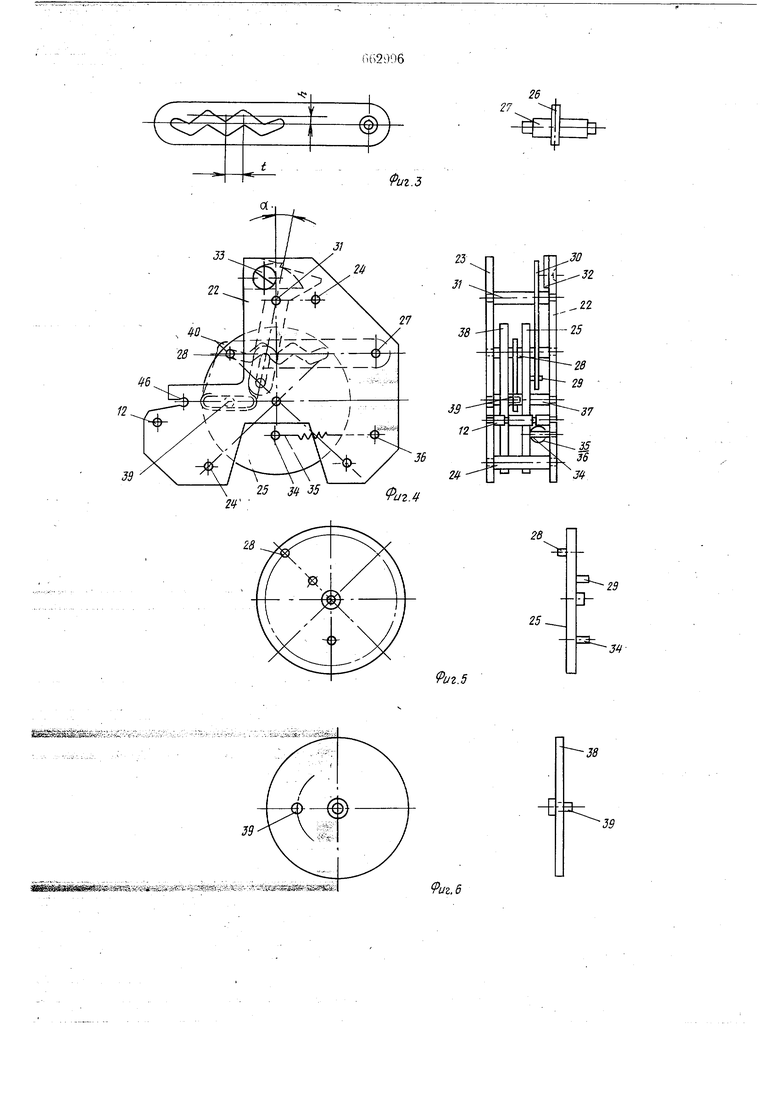
один полюс; на фиг. 2 - механйзм задержки, вертикальная и профильная проекции; на фиг. 3 - кулиса в сборе, вертикальная и профильная проекции; на фиг. 4 - другой , ... в-арца1д- - -выполнения механизма задержки,
вертикальная и профильная, проекции; на
фиг. 5 - ведущий подпружиненный инер ционный маховик в сборе, вертикальная и профильная проекции; на фиг. 6 г- ведомый инерционный маховик в сборе, вертикальная и профильная проекции; на фи7. 7 -храповик в сборе, вертикальная и профильная проекции; на фиг. 8 и 9 - варианты вы полнения кулисб, вертикальная и профильная проекции. , .. . В ячейках электр6изоля1,ТонйоТо 1 5рпуса 1, Тгнугретиняяполость которого представляет собой три разных по объему ячейки, установлены механизмы 2 задержки, в боковинах которых расположены контактодержатели 3 подвижных контактов на собственных осях 4. На одном конце каждого подвижного контактодержателя 3 закреплен подвижный контакт 5, а на другом его конце - гибкий проводник 6, соединенный с выводной шиной 7, которая крепитсяк корпусу 1 крёпежными деталями. В отверстии контактодержателя 3 подвижного контакта установлена ось 8, на которой расположены собачка 9 и пружина 10 кручения, при помощи.которой обеспечивается постоянное силбвое замыканИе между контактодержателем подвижного контакта, собачкой 9 и механизмом 2 задержки. Контактное нажатие при этом обеспечивается пружиной 11 , установленной на осях 8 и 12. и - образный контактодержатель 13 неподвижных контактов 14 установлен в электроизоляционной обойме 15, которая в свою очередь устанавливается в корпус 1. Одновременно обойма 15 электроизолирует разрыв в полюсе. Она крепится в корпусе 1 при помощи электроизоляционной вставки 16 и крепежных деталей 17 для предохранения от деформаций ветвей контактбдержателя 13 непбдвижных кбнтактбв. Во внутренней полости U - образной формы контактбдержателя 13 установлена электроизоляционнная расггорка 18, а по линии разъема между корпусом 1 и крышкой 19 - электроизоляционные перегородки 20, которые имеют прямолиненые пазы для прохода контактодержателей 3 подвижных кбнтактбв. В-крышке 19 размещены дугбгасительные устройства, разделенные между собой электроизоляционными перегорбдками 21. Крышка 19 сб вставленными в нее дугогасительными устройствами устанавлинается на корпус I и крепится крепежными деталями.
Механизм 2 задержки состоит из боковин 22 и 23г соСтавляющих его корпус и скрепленных между собой крепежными деталями 24, ве71.ущето подпружиненнбго инерционного маховика 25, кулисы 26 с криволинейным пазом (вбзможно выполнение с дополнительным прямолинейным пазом или круглым отверстием - см. фиг. 8 и 9) и дополнительной осью 27. В ведущем подпружиненном маховике 25 запрессованы палец 28, расположенный в начале криволинейного паза кулисы 26, и палец 29, расположенный в прямолинейном отверстии храповика 30, вращающегося на собственной оси 31. Крбме того, механизм задержки содержит регулируемый упор 32 сброса с крепежной деталью 33. В
ведущем подпружиненнбм инерцибнном маховике 25 запрессована пружина 34, на которой одним своим концом крепится противодействующая пружина 35, а другим своим концом противодействующая пружина кре Пится кПроушине регулируемого упора 36, при помощи которого осуществляется регулировка общего противодействующего усилия механизма 2 задержки. Упор 36 жестко закреплен в боковине 22. На общей оси 37 свободно вращается ведущий подпружиненный инерционный маховик 25, а также дополнительный ведомый (ведомые) инерционный маховик 38 (для соответствующего конструктивного исполнения механизма задержки) с запрессованным пальцем 39, который расположен в прямолинейном пазу (отверстии) дополнительной кулисы 40. При этом возможен вариант выполнения кулисы 40 из двух звеньев (деталей) - звена 41 (см. фиг. 9), в котором выполнен криволинейный паз 42, и звена 43, в котором выполнено круглое отверстие 44, скрепленных между собой щарнирно деталью 45. В боковинах 22 и 23 имеются прямолинейные вырезы 46, в которые (в собранный механизм 2 задержки) устанавливаются контактодержатели 3 подвижных.кон тактов на собственных осях 4. Криволинейный паз 42 может быть .выполнен в ведущем подпружиненном инерционном маховике, при этом соответствующий палец по зацеплению установлен в кулисе, палец ведомого инерционного маховика также установлен в кулисе, а прямолинейный паз выполнен в ведомом инерционном маховике. Как ведущий подпружиненный инерционный маховик, так и ведомый инерционный маховик могут быть выполнены с собственными осями вращения. Механизм задержки в каждой ячейке фиксируется при помощи крепежных деталей. Принцип действия токоограничивающего устройства совместно с автоматическим выключателем состоит в том, что при возникновении в цепях питания токов, отличных от допустимых, под воздействием возникших электродинамических усилий контакты 5 и 14 токоограничивающего устройства размыкаются значительно раньще, чем аварийные токи достигнут своего максимального амплитудного значения. Электрические дуги, образующиеся между размыкающимися контактами 5 и 14 токоограничивающего устройства, ограничивают своим возрастающим сопротивлением нарастание аварийного тока. Электромагнитныи расцепитель автоматического выключателя под действием ограниченного тока, если ei;o величина превосходит ток уставки автоматического вьжлючателя, сбрасывает расхождение контактов автоматического вь1-, ключателя и отключение ограниченного тока. После исчезновения тока в цепи контакты автоматического выключателя остаются в разомкнутом положении и могут быть вклю чены либо ручным, либо дистанционным приводом после устранения причин, вызвавших срабатывание токоограничивающего устройства и автоматического выключателя. Контактодержатели 3 подвижных контактов токоограничивающего устройства благо даря тому, что собачки 9 вощли в зацепление с храповиками 30 механизмов-2 задержки, под действием разности усилий между контактным нажатием пружины 11 и общим противодействующим усилием механизма задержки (в каждом разрыве полюса) медленно возвращаются в замкнутое положение. При зазоре 2 мм между контактами 5 и 14 происходит сброс общего противодействующего усилия (в каждом разрыве полюса) благодаря тому, что храповик 30 начинает вращаться вокруг своей оси 31 до тех пор, пока собачка 9, находящаяся в зацеплении с храповиком, не найдет на регулируемый упор 32 сброса. После сброса общего противодействующего усилия механизма 2 задержки контактодержатели 3 подвижных контактов замыкаются только под действием усилия пружин II контактных нажатий, обеспечивающих такую CKOpocTbj при которой исключается приварка контактов 5 и 14. Храповик 30 механизма 2 задержки вместе с его другими элементами под действием противодействующей пружины 35 возвращается в исходное (первоначальное) положение. Разность усилий между контактным нажатием пружины IГ и общим противодействующим усилием механизма 2 задержки (в каждом разрыве полюса) регулируется регулируемым упором 36. Кинематическая связь между контактодержателями 3 подвижных контактов и механизмами 2 задержки обеспечивается собачками 9. Постоянное силовое замыкание в механизме 2 задержки обеспечивается противодействующей пружиной 35. В процессе работы инерционный подпру-f жиненный ведущий, маховик 25, совершающий вращательно-возвратное движение, передает это движение через палец 28 кулисе 26 или 40. Палец 28, вращаясь вместе с ведущим маховиком 25, давит на соответствующие стенки криволинейного паза кулисы 26 или 40 и заставляет кулису качаться на своей оси. Кроме того, это же давление создает тормозной момент и обеспечивает остановку кулисы 26 или 40 при смене ею направления качения благодаря наличию в кулисе криволинейного паза. Криволинейный паз кулисы 26 или 40 удлиняет путь контактирования пальца 28 с маховиком 25 и тем самым создает дополнительный тормозной путь при малом угле поворота ведущего маховика на угол, равный 90°. Кулиса 40, воздействуя на палец 39 своим прямолинейным пазом, заставляет ведомый маховик 38 совершать такое же колебательное движение на своей оси. Ведомый инерционный маховик введен в конструкцию как дополнительная инерционная масса. Участок x-ij храповика 30 выйШнёнТЛаДким, без зубьев, потому, что минимальная длительность задержки механизма 2 задержки, равная не менее 0,02-1,0 с, определяется минимальным углом поворота храповика, высотой h, шагом t, количеством зубьев в криволинейном пазу кулисы 26 и расстоянием от пальцев 28 и 29, закрепленных в tgjyTHg-M Подпружиненном инерционном маховике 25, до осей 27 и 37 врацхения, т.е. независимо от величины отброса (зазора) контактодержателей 3 подвижных контактов мйнймальная длительность задержки их остается практически постоянной величиной и равна не менее 0,02-1,0 с. По истечении необходимого минимальноТо периода времени задержки контактодерЖйтёли подвижных контактов возвращаются в Замкнутое положение поД действием разности усилий №ждут рдааКтнйм н а кйтйем и общим противодействующим усилием ме, ханизма задержки. Эта разность усилий должна быть минимальной и ДостйгаёТся за счет регулировки противодействующей пружины регулируемым упором. ---- Под задержкой контактодержателей подвижных контактов в разомкнутом положении..на необходимый минимальный период йрёмени следует понимать медленный возв рат их в замкнутое положение потому , g ; каждом контактодержателе подвижных Iffiifli S;в МЖДом пьл1(:)сё,- гйдк№н механизм задержки, который обеспечивает за ТщдУШШёСксфЬсти возврати и зайййу1 оё fio ложение контактодержателей подвижных Шйтайтов До величины, значительно меньшей .,..- - .,той скорости, которая могла бы воздействия только усилий контактных нажатий при возврате контактодержателей пОДвиж НЫХконтактов в замкнутое (рабочее)поло жение. По достижении зазора 2 мм между контактами происходит сброс противодействующего усилия МёханизМа задержки и движение контактодержателей подвйжных Контактов до замыкания их происходит под действием усилий пружин контактных нажатий, т ё койтактодержатёли ПОДВЙЖЖ1Х кбнтактов опять приобретают необхбДйМуК) ско р5сть иТДвиженияг, исклк)чая возможность приварки контактов., Контактная система блока обё(5пёчйв ает быстрый отброс контактодержателей пбДвиж ЖГх KoHTaktoB§ЙКтродинамйчёбкимй УСИ при возникновении аварийШХ токов величиной менее 5кА амплйтуДногб Зн1 чёния благЩаря введёнйю вцепь каждого полюса ДВухэлектрических Дуг с последующей задержкой контактодержателей подвижных 1Ш1 ШШ вТГ§§(ЖШ| ШГпбЖйКШЖ-тга необходимый минимальный период времени общим противодействующим усилием механизма задержки, что обеспечивает вь1Сокую и наДёжнуйстепень 6коЪграШчён1ияйр и эк сплуатации предлагаемого устройства, послёД6вateльнo включенного г. автоматическим выключателем. При этом электрические дуги вводятся в аварийные силовые цепи значительно раньше, чем электромагнитный расцепитель обеспечит расхождение контактной системы автоматического выключателя, вСЛёДствиё контакты автоматического выключателя отключают тблько ограниченный ток, т. е. при указанном сочетании токоограничивающее устройство выполняет функции накопителя электрической энергии, а автоматический выключатель - функции разъединителя. Формула изобретения 1. Токоограничивающее устройство для автоматических выключателей, содержащее усГановленные в изоляционном корпусе в КаяйДбм полюсе контактную и дугогасительйую системы,причем подпружиненные контактодержатели подвижных контактов установлгёны с возможностью поворота на осях в плоскости, параллельной контактодержагеляМ неподвижных контактов, гибкие проводники, выводные шины и механизм задержки, состоящий из регулируемого упора, пальца, собачки, которая одним своим концом ycTaMbiBjreHa на оси контактодержателя подвижного контакта, а другим опирается на поверхность регулируемого упора, пружины кручения, установленной на той же оси, что и собачка, храповика, установленного с бЬШЬжнбстью возвратно-вращательного движения, одна часть которого выполнена зубчатой, по крайней Мере одного подпружинёнПого инерциойного маховика, установленного на Другой оси, и противодействующий пруЖиныгкоторая одним своим концом прикреплена Кмаховику, а другим - к регулируемому упору, отличающееся тем, что, с целью обеспечения одинаковой по длительности во времени задержки донтактодержателей подвижных контактов в отключенном положении с последующимодновременным и согласованным возвратом их в замкнутое положение независимо от величины их отброса, механизм задержки- установлен в корпусе, выполненном в виде скрепленных боковин, и снабжен кулисой с криволинейным пазом и дополнительным пальцем, пальцы жестко закреплены на маховике, а другая часть храповика выполнена с отверстием, и которороевведен один из пальцев маховика, другой палец при этом расположен в криволинейном пазу , кудйсы, ПОДВИЖНО установленной на дополнительной оси, закрепленной в боковинах корпуса, в которых также закреплены ось маховика, установленного с возможностью вращения вокруг своей оси, и регулируемый упор. 2. Устройство по п. 1, отличающееся тем, что механизм задержки снабжен дополни,:тельным инерционным маховиком и дополнительной кулисой с дополнительным отверстием, установленной с возможностью вращения на одной оси с указанной кулисой, причем эта ось закреплена в обеих кулисах, а дополнительный инерционный маховик установлен с возможностью вращения на общей оси, что и указанный маховик, при этом на дополнительном инерционном маховике закреплен другой палец, который расположен в отверстии дополнительной кулисы.
1
19
ot
гй йч;38
9иг.6
31
-
309иг.7
27
09иг.в
41 27 N
И
45
иг.э
