Предлагаемый способ автоматического контроля текучести грубодиоперсных жидких сред основан на измерении потери напора среды, протекающей в трубопроводе, посредством яасос-весов.
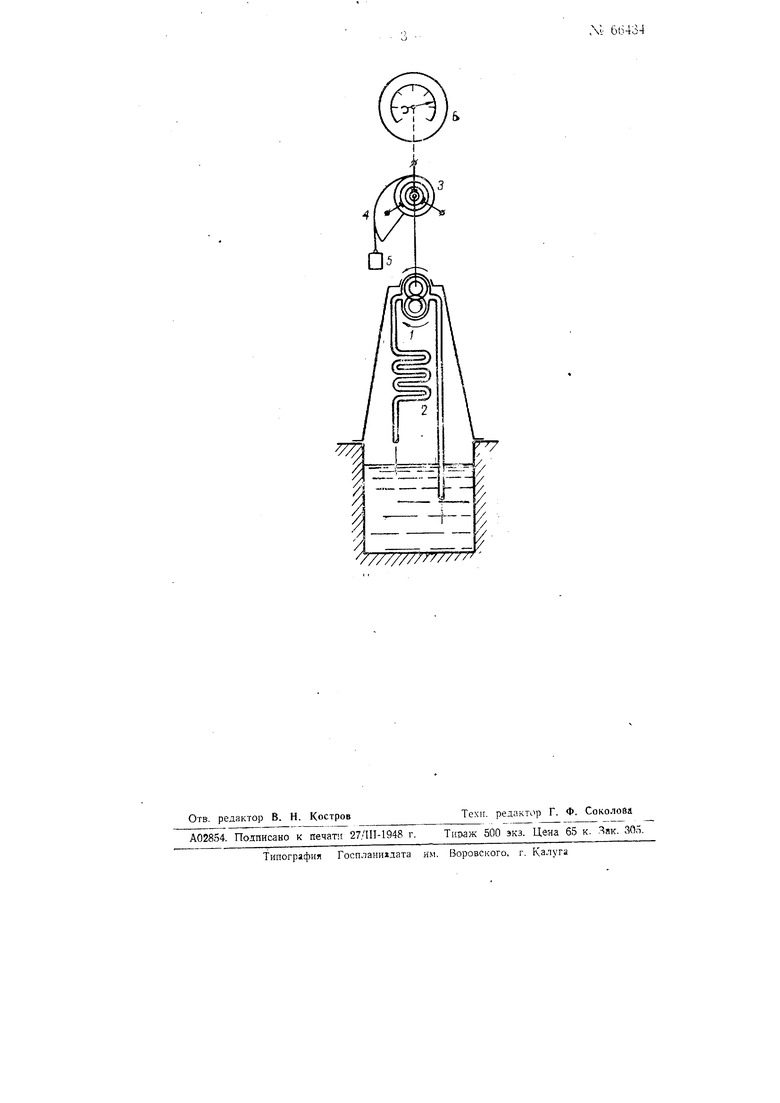
Шестеренчатый насос 1 прокачивает контролируемую среду через трубопровод2 известной длины со скоростью, соответотвующей ламинарному режиму движения. Статор мотора 5 (с короткозамкнутым ротором), вращающего насос, установлен в подшипниках и снабжен шкивом 4 с переменным радиусом, на который наматывается трос с грузом 5. Ток к статору мотора подводится щетками через контактные кольца или безмоментным гибким вводом. На статоре укреп/1ена стрелка указателя 6 угла его поворота.
Когда мотор не работает, груз удерживает статор в положекии HaHMesibuiero мом:ента. образу люго им на шкиве, т. е. шкив повер);ут к плечу груза своим наименьшим радиусом; при этОМ стрелка указателя находится на нуле. Когда мотор вступит в действие и насос начнет прокачивать контролируемую среду, Статор со щкивом и
стрелкой под влиянием крутящего момента будет поворачиваться в сторону, противоположную вращению ротора, увеличивая плечо, на которое действует груз. Этот поворот будет происходить до тех пор, пока момент груза не уравновесит крутящий момент мотора.
Крутящий момент мотора зависит от нагрузки насоса, выражаемой произведением напора на объем прокачиваемой среды. Этот объем зависит только от числа оборотов щестеренчатого насоса, которое в данном случае неизменно. Напор же определяется гидравлическим сопротивлением трубопровода, отводящего среду от насоса.
Потеря напора на трение при ламинарном движении сре1ды по трубопроводу прямо пропорциональна ее динамической вязкости и средней скорости и обратно пропорциональна квадрату диаметра трубопровода. При постоянном сечении трубопровода и неизменной скорости, обусловленно постоянством объема Лчидкости. потеря напора будет зависеть только от динамической вязкости, характеризующей подвижно.сть среды. Таким образом крутящий МОмент на валу
насоса определяется потерей напора, затрачиваемой на преодоление трения прокачиваемой через трубопровод среды.
Поскольку фактор текучести в применении к тру боди1сперсным жидким средам принимается за показатель их транспортабельности по трубам, данный способ контроля наиболее полно отражает всю сумму факторов, влияющих на движение среды 1ПО трубам и охвштьгааеMbtx понятием текучести. Разность радиусО|В ш:кива должна соответствовать разности круиящих моментов, насоса, определяемых диапазоном изменения текучести коитролируемой среды. Эта разиость укладывается в определенную величину угла поворота статора мотора, а шкала его указателя градуируется в относительных или абсолютных единицах текучести. На оси указателя, кроме стрелки или пера местного регистратора, могут быть установлены контактная система для сигнализации и передатчик показаний на расстояние, а также устройство для автоматического регулирования соответствующего технологического процесса.
Предмет изобретения
Устройство для автоматического контроля текучести грубодисперсных сред измерение потери напора контролируемой србды. протекающей через трубопровод в ламинарном режиме, отличающеес я тем, что для определения потери напора при.менвн шестеренчатый насос I, прокачивающий среду через трубопровод 2, и мотор 3, установленный в подшипниках и снабженный шкивом 4 переменного радиуса и грузом 5.
V///7////7////

| название | год | авторы | номер документа |
|---|---|---|---|
| Поршневой манометр | 1947 |
|
SU70791A1 |
| Автоматический вакуумный дозатор | 1941 |
|
SU65326A1 |
| Манометр | 1945 |
|
SU68682A1 |
| Поплавковый плотномер жидкости | 1983 |
|
SU1136063A2 |
| Автоматические весы | 1981 |
|
SU972246A1 |
| БЕСШАТУННЫЙ МОТОР-КОМПРЕССОР | 2014 |
|
RU2578487C1 |
| УСТРОЙСТВО ДЛЯ РЕОЛОГИЧЕСКОГО АНАЛИЗА КРОВИ | 2014 |
|
RU2570381C1 |
| СПОСОБ ПЕРЕРАБОТКИ УГЛЕВОДОРОДНОГО СЫРЬЯ | 2012 |
|
RU2574408C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С АВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2116461C1 |
| Вискозиметр | 1959 |
|
SU130709A1 |