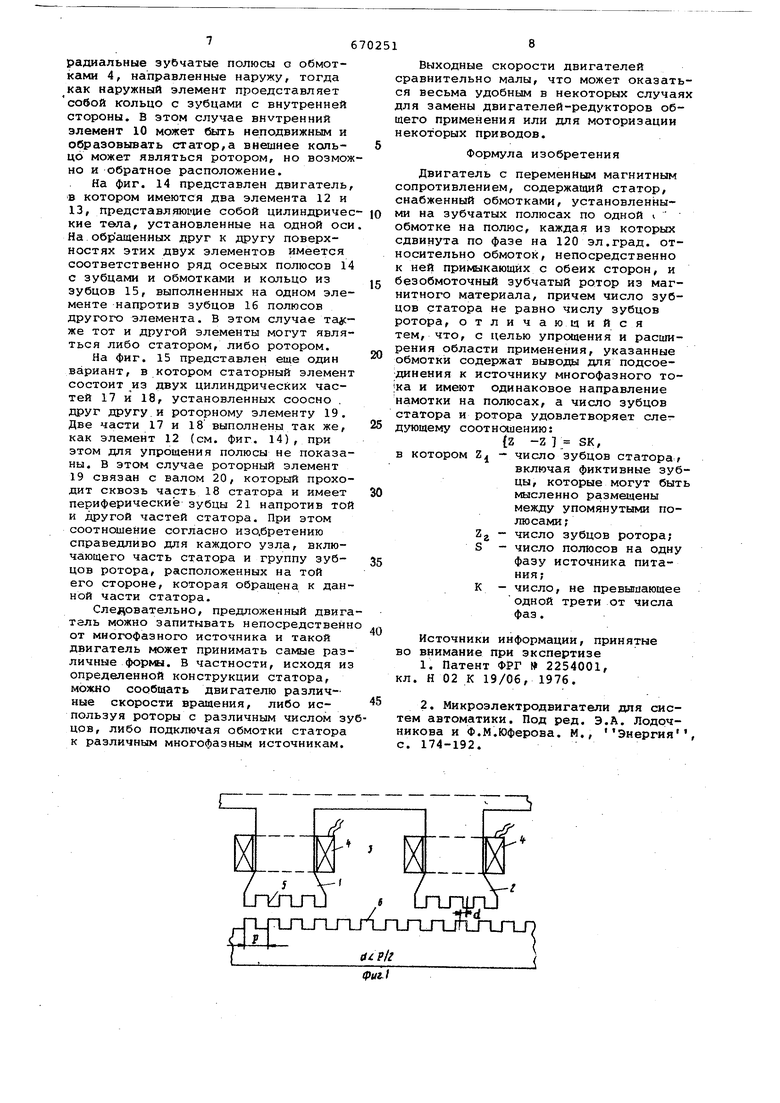
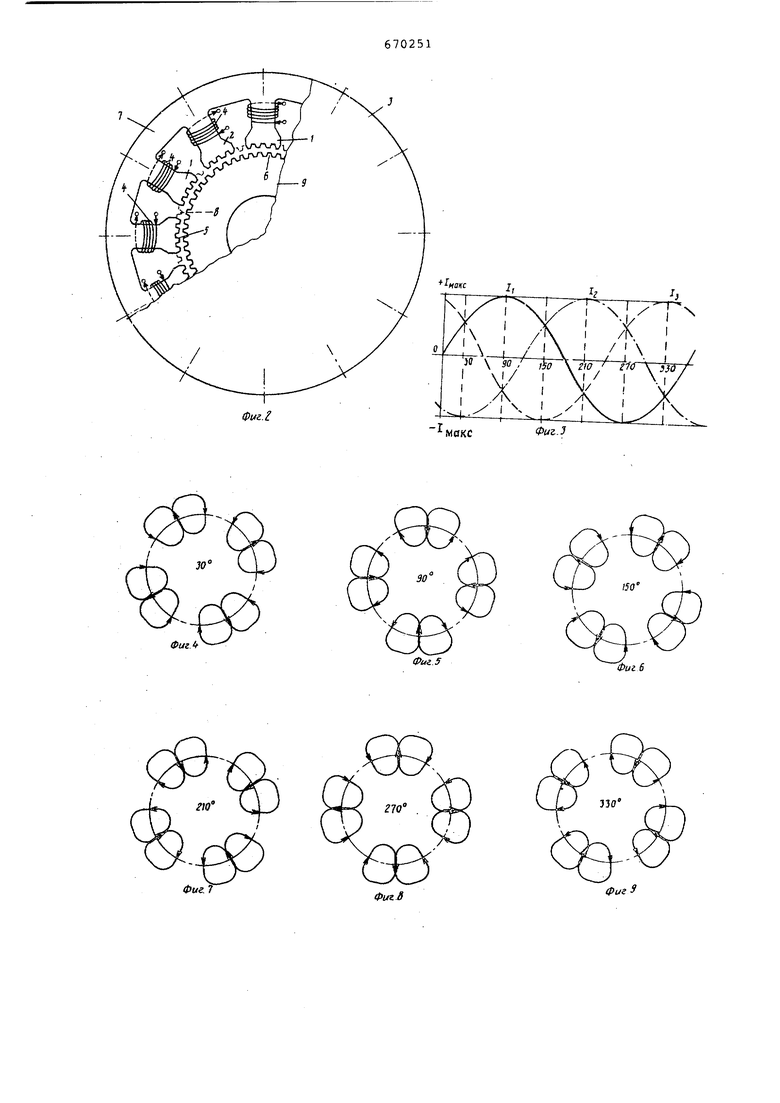
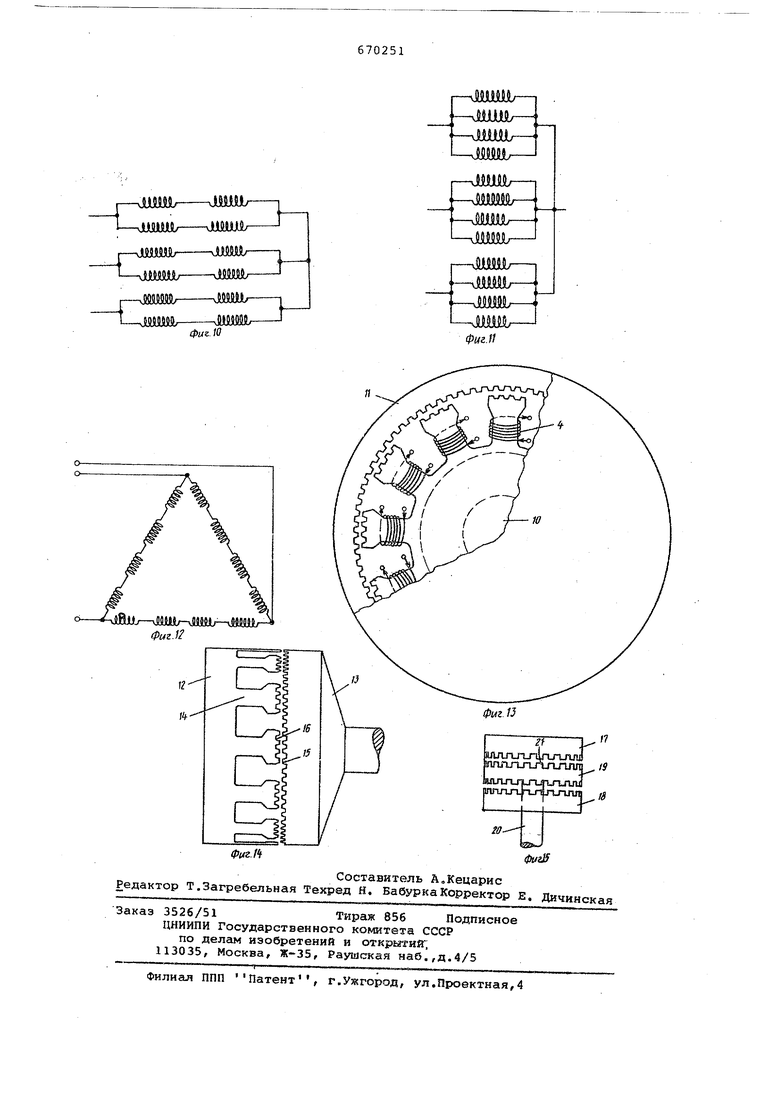
помещены между упомянутыми полюсами; число зубцов второго элемента; число полюсов на одну фазу источника питани сомножитель числа фаз упомянутого источника не превышающий трети от этого числа фаз. tia фиг. Iсхематически изображен двигатель с переменным магнитньлм соп ротивлением; на фиг.: 2 - то же, частичный поперечный разрез; на фиг. 3 9 - образование вращаюшихся магнитны полей в двигателе; на фиг. 10-12 три способа подключения двигателя; на фиг. 13-15 - предложенный двигатель, три варианта выполнения. На фиг. 1, иллюстрирующей принцип работы двигателя с переменным сопротивлением, изображены два последовательных полюса 1 и 2 того элемента двигателя, который в данном случае будет считаться неподвижным элементом или статором :3. Полюсы, выполнен ные из магнитного материала, окружены обмотками.4, которые могут возбуждаться в определенной последовательности при помощи коммутирующего устройства. Каждый полюс имеет некоторое число зубцов 5, перед кото- рыми могут перемещаться зубцы дру- гого элемента, который считается подвижным элементом или-ротором и вы полнен из магнитного материала, но который не имеет заранее выполненных магнитных полюсов. Между статорными и роторными зубцами 6 имеется воздушный зазор. Работа такого двигателя основана на том, что между статорными зубцами 5 двух последовательных полюсов существует: некоторый сдвиг б,при этом шаг зубцов обозначен через Р. Таким образом, если возбудить только обмотку 4 полюса 1 (см. фиг. 1), то ничего не произойдет, поскольку зубцы находятся точно друг против друга и магнитное сопротивление рассмат риваемой Магнитной цепи минимально. Но «ели теперь возбудить обмотки двух полюсов 1 и 2, то ротор будет Стремиться к такому положению,в кото ром минимальным будет магнитное сопр тивление обеих магнитных цепей.В ре льтате этого возникает движение рото Если затем возбудить только обмотку люса 2, то произойдет новое перемеще ротора, направленное на точное совм сцение.его зубцов с зубцами полюса 2 Работа двигателя обеспечивается при соблюдении двух условий, а именно Р и возбуждения обмоток 4 во вполне определенной посяедовательно Придав элементам двигателя форму окружности, получают двигатель с вращательным движением. До настоящего времени переключение обмоток осуществлялось при помощи электронных коммутирующих устройств или при изменении переменного тока, за счет чего в двигателе, например, при помощи трехфазного напряжения создавалось одно или несколько вращающихся магнитных полей. Однако при использовании этой последней системы питания обмоток до сих пор не представлялось возможным исключить такие электронные элементы как диоды. Таким образом, данное изобретение обеспечивает сдвиг d зубцов подвижного элемента Относительно зубцов неподвижного элемента за счет установления определенного соотношения между числом зубцов неподвижного элемента и числом зубцов подвижного элемента и системой питания на переменном токе, которую хотят использовать для двигателя, причем эта зависимость позволяет конструировать двигатели, которые могут работать на многофазном переменном напряжении во всем их ассортименте без необходимости введения какого-либо электронного коммутирующего элемента, такого как диод, тиристор и т.д. Предположим, что число зубцов первого элемента, включая так называемые фиктивные зубцы, которые могли бы находиться между последовательньп1Ш полюса1 и этого элемента, если бы зубчатая нареэка была непрерывной; число зубцов второго элемента;число полюсов первого элемента на одну фазу напряжения питания, SK, где, К - сомножитель числа фаз п питания двигателя, не превышающий п/3 из тех соображений, что для создания в двигателе вращающегося поля, обеспечивающего переключение магнитных потоков в полюсах двигателя, не-обходимо располагать числом фаз, как минимум равньв трем. Таким образом приведенное соотношение непосредст венно связывает число фаз напряжения с разницей между числами подвижных и неподвижных зубцов двигателя. Поскольку величина S определяет число вращающихся полей в двигателе,; . число образуеких пар полюсов можно вычислить, исходя из выбранного числа полюсов на одну фазу и вида напряжения питания, общее число полюсов двигателя . Скорость вращения такого двигателя вычисляется при помечай соотношения в котором SZ - скорость вращения, об/мин; f - частота напряжения тания; Z - число зубцов подвиж го элемента. Двигатель, изображенный на фиг. (предпочтительный вариант), содержи статор 3 кру.ового сечения, выполн ный из магнитного материала в виде внешнего кольца 7, из которого по р диусу выступают внутрь равномерно распределенные по окружности полюсы 1, 2, число которых в данном слу чае равно двенадцати. На каждом полюсе статора установлена обмотка 4 На свободном торце каждого полюса имеется несколько зубцов 5, число которых равно четырем. Однако при подсчете разности между числами роторьых и статорных зубцов для каждо го полюса 1, 2 учитывают один фикти ный зубец 8, который фактически отсутствует, но может быть мысленно помещен рядом с зубцами данного полюса, как показано пунктиром на фиг. 2. В действительности этот зуб не может быть выполнен по технологическим соображениям, прежде всего из-за необходимости установки обмот ки вокруг полюсов 1, 2. Каждый полю 1, 2 имеет расширение на участке, где выполнены зубцы 5. Кроме того, на фиг. 2 показано, что все обмотки статора наматываются в одну сторону вокруг соответствующих полюсов, в результате чего создаваемое обмотко в своем полюсе магнитное поле может замыкаться на два соседних полюса. Двигатель содержит также ротор 3 выполненный в виде колеса из магнит ного материала и имеющий на периферии зубцы б, перемещающиеся перед зубцами 5 статора, с которыми они о разуют воздушный зазор, при этом ст тор и ротор являются соосными. Сам по себе ротор не образует никакого магнитного полюса. Поскольку в описываемом примере каждый полюс 1, 2 статора имеет четыре зубца 5, а число полюсов равно двенадцати, общее число зубцов статора равно 60 с учетом фиктивных зу цов 8. Если при этом выбрать трехфазное напряжение питания, то число полюсов на одну фазу будет: S Р/п, т.е. 4 в результате чего двигатель будет иметь четыре пары магнитных полюсов В этом случае Z составляет К равен 1, но Z может быть равным также 64, поскольку оба эти .числа удовлетворяют условию, согласно которому сдвиг между роторными и стато ными зубцами двух последовательных .полюсов должен быть меньше половины шага зубцов, Поскольку обмотка каждого полюса 1, 2 запитывается синусоидальным нап ряжением, то ее поле будет иметь синусоидальную форму со сдвигом по фазе относительно напряжения на угол, зависящий прежде всего от омического сопротивления обмотки. Поедполагается, что обмотки 4 подключены согласно схеме по фиг. 10. Если провести три кривые синусоидальных токов в двенадцати обмотках 4 (см. фиг. 3), то можно указать знак и величину магнитных потоков в полюсах, соответственно при фазовых углах 30,99,150,210, 270 и 330°периода тока. Когда поток в данном полюсе максимален, то в , двух соседних полюсах поток имеет противоположный знак и половинную величину. Таким образом, двигатель согласно изобретению может быть подключен непосредственно к источнику без какойлибо дополнительной компоненты. На фиг.4-9 для каждого момента, рассматриваемого на фиг. 3, указаны направление и величина магнитных потоков в двенадцатк полюсах двигателя . В двигателе создается вращающееся поле и это поле совершает полоборота за два полупериода тока. В течение этого времени ротор поворачи-i вается на два зубца так, что при частоте источника питания 50 гц скорость этого двигателя будет составлять .., 2x50x60 ,..-, / 52 -- 107 об./мин. Статор 3 и ротор 9 могут быть выполнены из любого подходящего магнитного материала, причем предпочтительным является материал, в котором не могут возникать сильные токи Фуко. Можно использовать, например, мягкую сталь, пакеты пластин стали с кремнием, спеченный металл или также эпоксидную смолу с наполнителем из частиц магнитного металла, например железа. На фит. 10-12 показаны некоторые из возможных вариантов включения обмоток 4 двигателя, причем это включезвездойние может выполняться (см. фиг. 10 и 11) или треугольником (см. фиг. 12). Обмотки могут включаться попарно последовательно, а затем параллельно или целиком параллельно или последовательно при любой выбранной конфигурации. Можно также питать двигатель однофазным напряжением, преобразуемым в трехфазное напряжение при помощи фазосдвигающих конденсаторов. На фиг. 13-15 представлено несколько возможных вариантов двигателя. Однако следует отметить, что эти варианты могут быть применены для всех двигателей согласно изобретеию, удовлетворяющих указанному соотношению. На фиг. 13 представлен вариантр в отором два подвижных элемента 10 и 11, имеющих в целом цилиндрическую орму, установлены сосено друг лругу, ри этом внутренний элемент 10 имеет радиальные зубчатые полюсы с обмотками 4, направленные наружу, тогда как наружный элемент проедставляет собой кольцо с зубцами с внутренней стороны. В этом случае внvтpeнний элемент 10 может быть неподвижным и образовывать статор,а внешнее кольцо может являться ротором, но возмож но и обратное расположение. На фиг. 14 представлен двигатель, в котором имеются два элемента 12 и 13, представляюгчие собой цилиндричес кие тела, установленные на одной оси На обращенных друг к другу поверхностях этих двух элементов имеется соответственно ряд осевых полюсов 14 с зубцами и обмотками и кольцо из зубцов 15, выполненных на одном элементе напротив зубцов 16 полюсов другого элемента. В этом случае же тот и другой элементы могут являться либо статором, либо ротором. На фиг. 15 представлен еще один вариант, в котором статорный элемент состоит из двух цилиндрических частей 17 и 18, установленных соосно . друг другу.и роторному элементу 19. Две части 17 и 18 выполнены так же, как элемент 12 (см. фиг. 14), при этом для упрощения полюсы не показа ны. В этом случае роторный элемент 19 связан с валом 20, который проходит сквозь часть 18 статора и имеет периферические зубцы 21 напротив той и другой частей статора. При этом соотношение согласно изо.бретению справедливо для каждого узла, включающего часть статора и группу зубцов ротора, расположенных на той его стороне, которая обращена к дан ной части статора. Следовательно, предложенный двиг тель можно запитывать непосредственн от многофазного источника и такой двигатель может принимать самые раз личные форл«. В частности, исходя и определенной конструкции статора, можно сообщать двигателю различные скорости вращения, либо используя роторы с различным числом з цов, либо подключая обмотки статора к различным многофазным источникам. Выходные скорости двигателей сравнительно малы, что может оказаться весьма удобным в некоторых случаях для замены двигателей-редукторов общего применения или для моторизации некоторых приводов. изобретения Двигатель с переменным магнитным сопротивлением, содержащий статор, снабженный обмотками, установленными на зубчатых полюсах по одной i обмотке на полюс, каждая из которых сдвинута по фазе на 120 эл.град, относительно обмоток, непосредственно к ней примыкающих с обеих сторон, и безобмоточный зубчатый ротор из магнитного материала, причем число зубцов статора не равно числу зубцов ротора, отличающийся тем, что, с целью упрощения и расширения области применения, указанные обмотки содержат выводы для подсоединения к источнику многофазного то|ка и имеют одинаковое направление намотки на полюсах, а число зубцов статора и ротора удовлетворяет слетдующему соотношению: {Z -Z 1 SK, в котором Z - число зубцов статораf включая фиктивные зубцы, которые могут быть мысленно размещены между упомянутыми полюсами ; Zg число зубцов ротора; S - число полюсов на одну фазу источника питания;К - число, не превышающее одной трети от числа фаз. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ 2254001, кл. Н 02 К 19/06, 1976. 2.Микроэлектродвигатели для систем автоматики. Под ред. Э.А. Лодрчникова и Ф.М.Юферова. М., Энергия, с. 174-192.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронно-синхронный преобразователь частоты | 1974 |
|
SU692017A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2441308C1 |
| НИЗКООБОРОТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2412518C1 |
| Индукторная машина | 1968 |
|
SU316157A1 |
| КОЛЬЦЕВОЙ МОТОР | 2008 |
|
RU2452578C2 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПЕРЕМЕЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2005 |
|
RU2314625C2 |
Фиг.
Фиг. 7
Фиг.5
фиг 9
Фиг .8
