Изобретение относится к электротехнике, в частности к электрическим машинам, и может быть использовано в качестве низкооборотных высокомоментных двигателей и низкооборотных генераторов.
Известна электрическая машина переменного тока (Патент RU 2167482 С1, авторы Иванов-Смоленский А.В., Глазков В.П. МПК 7 H02K 3/12, H02K 3/04), содержащая катушки обмотки якоря, имеющие шаг, равный зубцовому делению, отличающаяся тем, что число пар полюсов p связано с числом пазов Z соотношением 1<Z/p<4, а число пазов на полюс и фазу меньше единицы. Недостатком аналога является недостаточно четкая проработка формулы изобретения. Так при Z/р=2, (т.е. Z=2·р) невозможно создание машины с числом фаз более одной, магнитное поле - пульсирующее, а приемлемых характеристик удается добиться лишь при вращающемся поле. Кроме того, наблюдается «залипание» - устойчивое положение, когда зубцы якоря встают напротив полюсов индуктора. Вывести машину из этого состояния крайне трудно. Кроме того, судя по чертежам, в аналоге речь идет о машине с возбуждением от постоянных магнитов, применимом лишь для машин малой и средней мощности.
Наиболее близким по технической сущности к настоящему изобретению является Электромеханический преобразователь (Патент RU 2302692 С1, авторы Авдонин А.Ф., Дашко О.Г., Захаренко А.Б. и др. МПК Н02К 19/10), содержащий, по меньшей мере, одну статорно-роторную пару, в которой статор состоит из сердечников из материала с высокой магнитной проницаемостью, торцами прикрепленных к опорному статорному кольцу и ориентированных параллельно основному магнитному потоку, и между которыми расположены проводники многофазной обмотки, ротор выполнен в виде двух коаксиально расположенных наружного и внутреннего индукторов-магнитопроводов из материала с высокой магнитной проницаемостью в форме полых цилиндров, закрепленных с возможностью вращения относительно статора, несущих расположенные по окружностям полюса с чередующейся полярностью, обращенные через рабочие зазоры к статору и охватывающие его, при этом полярность полюсов, расположенных на внутреннем и наружном индукторах друг напротив друга, согласная, отличающийся тем, что число полюсов 2·р, число пар лотосов p, число сердечников статора Z и число катушечных групп в фазе d связаны соотношениями:

где: l=1, 1.5, 2, 2.5, 3, 3.5… - целое положительное число или число, отличающееся от него на 0.5, при этом, если l - целое число, обмотки катушечных групп в каждой фазе соединены согласно, а при l - отличном от целого числа на 0.5 и d равно четному числу (2, 4, 6 …), обмотки катушечных групп в каждой фазе соединены встречно и

и при этом

Недостатком прототипа является то, что вышеприведенные формулы связи охватывают не всю гамму оптимальных исполнений магнитоэлектрических машин с дробным числом пазов на полюс и фазу q<1, где q=Z/2·p·m, m - число фаз.
Целью настоящего изобретения является расширение границ применимости запатентованного ранее технического решения.
Обмотки с дробным числом пазов на полюс и фазу q<1, расположенные на статоре, имеют обширный гармонический состав МДС. Однако две гармоники МДС имеют наибольшую амплитуду и вращаются в противоположных направлениях с различными, хотя и близкими друг к другу числами пар полюсов. МДС такой обмотки можно записать следующим образом:

где F1m, F2m - амплитуды гармоник с наибольшей амплитудой, ω1 - угловая частота, t - время, p1, p2 - числа пар полюсов упомянутых гармоник. Если сделать ротор, имеющий число пар полюсов p, равное числу пар полюсов p1, то гармоника с числом пар полюсов p1 станет основной, а гармоника с числом пар полюсов p2 - наибольшей из создающих потери мощности. Если сделать ротор, имеющий число пар полюсов p, равное числу пар полюсов p1, то гармоника с числом пар полюсов p2 станет основной, а гармоника с числом пар полюсов p1 - наибольшей из создающих потери мощности. В перечисленных случаях удается добиться максимального момента и наивысшего КПД и наилучшего отношения максимальная полезная мощность/масса. Если сделать ротор, имеющий число пар полюсов p, равное числу пар полюсов какой-либо иной гармоники МДС, то обе гармоники с числом пар полюсов p1 и p2 станут создавать потери мощности. В этом случае не удается добиться удовлетворительных энергетических и массогабаритных показателей.
Полученный электромеханический преобразователь может иметь один или несколько периодически повторяющихся участков магнитной системы, т.е. полученные соотношения Z и p могут быть увеличены в целое число раз.
Исходя из вышеизложенного, лучшим вариантом является выбор числа зубцов якоря и пар полюсов индуктора электромеханического преобразователя, исходя из следующих соотношений.
Для двухфазной обмотки (m=2)
для Z=4m·k p=3k, 5k; для Z=6m·k p=5k, 7k; для Z=8m·k p=7k, 9k;
для Z=10m·k p=9k, 11k; для Z=12m·k p=11k, 13k; для Z=14m·k p=13k, 15k;
для Z=16m·k p=15k, 17k; для Z=18m·k p=17k, 19k; для Z=20m·k p=19k, 11k;
для Z=22m·k p=21k, 23k; для Z=24m·k p=23k, 25k.
Таким образом, для Z=y·m·k 
где y≥4, четное число, k - целое положительное число.
Для трехфазной обмотки (m=3):
для Z=m·k p=k, 2k; для Z=3m·k p=4k, 5k; для Z=4m·k p=5k, 7k;
для Z=5m·k p=7k, 8k; для Z=7m·k p=10k, 11k; для Z=8m·k p=11k, 13k;
для Z=9m·k p=13k, 14k; для Z=11m·k p=16k, 17k.
Таким образом,
при этом y, k - целые положительные числа.
Число k - число периодически повторяющихся участков магнитной системы. При k=1 магнитное поле в зазоре электромеханического преобразователя напоминает магнитное поле машины с катящимся ротором, наблюдается одностороннее магнитное притяжение. Предпочтительно выбирать k>1.
Число катушек b в катушечной группе определяется соотношением:

При расчете по формуле (7) b≥1. Для определенности даже при b=1 будем считать, что обмотка имеет катушечные группы.
Настоящее изобретение поясняется чертежами:
Фиг.1. Эскиз поперечного сечения активной части электромеханического преобразователя с m=3, Z=15, p=7, k=1.
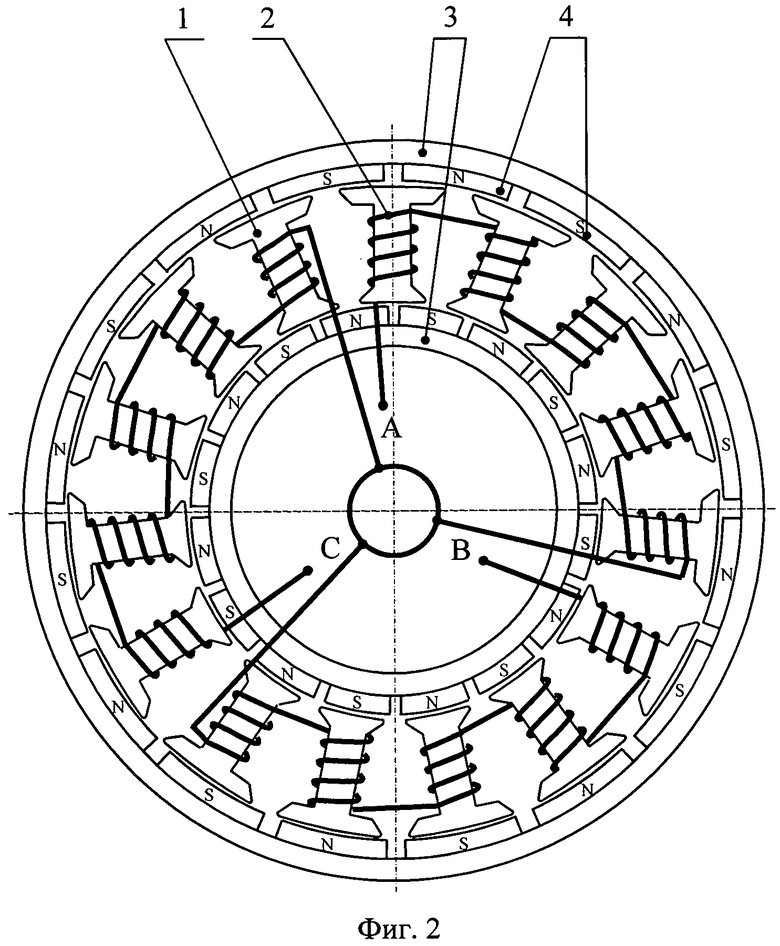
Фиг.2. Эскиз поперечного сечения активной части электромеханического преобразователя с m=3, Z=15, p=8, k=1.
Рассмотрим фиг.1 и 2. На сердечниках 1 якоря размещена обмотка 2, где буквами А, В, С обозначены начала соответствующих фаз. Катушки обмотки 2 статора наматываются из обмоточного провода, например медного эмаль-провода, на электроизолирующие каркасы, либо на зубцовую изоляцию на каждый сердечник 1 статора. Катушки соединяются в катушечную группу. Для снижения электрических («омических») потерь катушечная группа, либо фаза в целом, может наматываться непрерывным проводом. Следует отметить, что число катушечных групп в фазе d равно k=1, 2, 3, 4 … - целое положительное число, между собой они могут соединяться не только последовательно, но и параллельно (при d>1), а также образовывать параллельные ветви по нескольку последовательно соединенных катушечных групп в случае, если k=4, 6, 8, 10 … - четное число больше двух.
На коаксиально расположенных, скрепленных между собой с торца наружном и внутреннем ярмах 3 индуктора, выполненных в форме цилиндра, расположены постоянные магниты 4 чередующейся полярности.
Устройство работает следующим образом. Магнитный поток каждого постоянного магнита 4 проходит через воздушный зазор, ближайший зубец 1 статора, ярмо 3 индуктора, следующий зубец 1 статора, воздушный зазор, следующий постоянный магнит 4 и замыкается по ярму 3 индуктора. Пусть, для определенности якорь - неподвижен и является статором, а индуктор - вращается и является ротором. В двигательном режиме на зажимы каждой фазы обмотки 2 статора синхронной машины подается переменное напряжение, по обмотке протекает ток, вызывая вращающуюся МДС статора, две гармоники этой МДС имеют максимальную амплитуду. Ротор выполнен с числом полюсов, равным числу полюсов одной из этих гармоник. При протекании электрического тока в обмотке 2 статора происходит силовое взаимодействие магнитного потока обмотки 2 с магнитным потоком постоянных магнитов 4. Перемещаясь, волна МДС статора вращает ротор, магнитный поток магнитов 4 перемещается от одного зубца к следующему, при этом наводит электродвижущую силу (ЭДС) в обмотке 2, находящейся в пазах между сердечниками статора. Величина ЭДС обусловлена величиной магнитного потока полюсов и частотой вращения ротора. При вращении ротора электромеханический преобразователь будет отдавать механическую мощность в нагрузку. В режиме генератора ротор электромеханического преобразователя приводится во вращение сторонним источником механической энергии, например ветродвигателем, при этом вращающий момент прикладывают к ротору, например, с помощью шкива с ременной передачей. Поле постоянных магнитов 2, перемещаясь вместе с ротором, пересекает обмотку 2 статора, в которой наводится ЭДС. Если цепь нагрузки замкнута, по обмотке 2 протекает ток. Получаемая при этом электрическая энергия передается в нагрузку.
Как и в прототипе, питание обмотки 2 статора от инвертора постоянного тока для эффективной работы машины в двигательном режиме вводится обратная связь по положению ротора. Например, в трехфазной обмотке при помощи датчика в каждый момент времени должны быть включены те две фазы, ось центрального зубца катушечных групп которых ближе к оси ближайшего по ходу поворота межмагнитного промежутка, полярность включания катушечной группы такова, чтобы сердечники 1 притягивались к следующему по ходу поворота магниту 4, именно на сердечники этих двух фаз действует наибольшая электромагнитная сила.
При использовании датчика Холла в качестве чувствительного элемента датчика положения ротора он может быть размещен между статором и ротором на стороне статора, обращенной к постоянным магнитам ротора, непосредственно в основном рабочем воздушном зазоре между коронками зубцов. Дополнительную магнитную систему для датчика положения ротора создавать не надо. Это дает возможность:
- упростить конструкцию за счет отказа от дополнительной магнитной системы;
- снизить требования к чувствительности применяемых датчиков Холла, так как используется магнитное поле силовых постоянных магнитов;
- более точно обеспечить моменты переключения фаз, так как именно в рабочем зазоре проходит истинный фронт полей постоянных магнитов;
- обеспечивать более высокую стабильность работы датчиков;
- упростить контрольные операции при производстве и диагностике.
Такое размещение датчиков возможно благодаря тому, что магнитное поле обмотки 2 сконцентрировано в зубцах, каждый из которых охватывается отдельной катушкой обмотки 2. В результате поле обмотки 2 меньше, чем при традиционной конструкции зубцовой зоны, и концентрируется в шлицевых областях пазов. Оно перпендикулярно оси паза и направлено от одного зубца к соседнему по направлению минимальной чувствительности датчика Холла. Таким образом, датчик практически не реагирует на поле обмотки 2, что обеспечивает гарантированные условия надежной работы и плавного вращения.
Трехфазная обмотка якоря (m=3) может быть соединена в звезду, как на фиг.1, 2, а также в треугольник.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРЦЕВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2013 |
|
RU2541427C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2551640C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ДВОЙНОГО ВРАЩЕНИЯ | 2010 |
|
RU2437196C1 |
| СИНХРОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2006 |
|
RU2311715C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2354032C1 |
| ТОРЦЕВАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2007 |
|
RU2337458C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2380814C1 |
Изобретение относится к области электротехники, в частности - к электрическим машинам, и может быть использовано в качестве низкооборотных высокомоментных двигателей и низкооборотных генераторов. Технический результат, достигаемый при использовании настоящего изобретения, состоит в расширении области использования электромеханического преобразователя, упрощении его конструкции при одновременном повышении точности моментов переключения фаз обмотки статора, снижении требования к чувствительности используемых и стабильности работы датчиков углового положения ротора (индуктора), обеспечении более точных моментов переключения фаз и упрощении контрольных операций при производстве и диагностике преобразователя. Предлагаемый электромеханический преобразователь содержит, по меньшей мере, одну статорно-роторную пару, в которой статор состоит из сердечников из материала с высокой магнитной проницаемостью, торцами прикрепленных к опорному статорному кольцу и ориентированных параллельно основному магнитному потоку, и между которыми расположены проводники многофазной обмотки, ротор выполнен в виде двух коаксиально расположенных наружного и внутреннего индукторов-магнитопроводов из материала с высокой магнитной проницаемостью в форме полых цилиндров, закрепленных с возможностью вращения относительно статора, несущих расположенные по окружностям полюса с чередующейся полярностью, обращенные через рабочие зазоры к статору и охватывающие его, при этом полярность полюсов, расположенных на внутреннем и наружном индукторах друг напротив друга, выполнена согласной, а число р пар полюсов и число Z сердечников статора связаны определенными соотношениями для двухфазной обмотки (m=2) и для трехфазной обмотки (m=3). 9 з.п. ф-лы, 2 ил.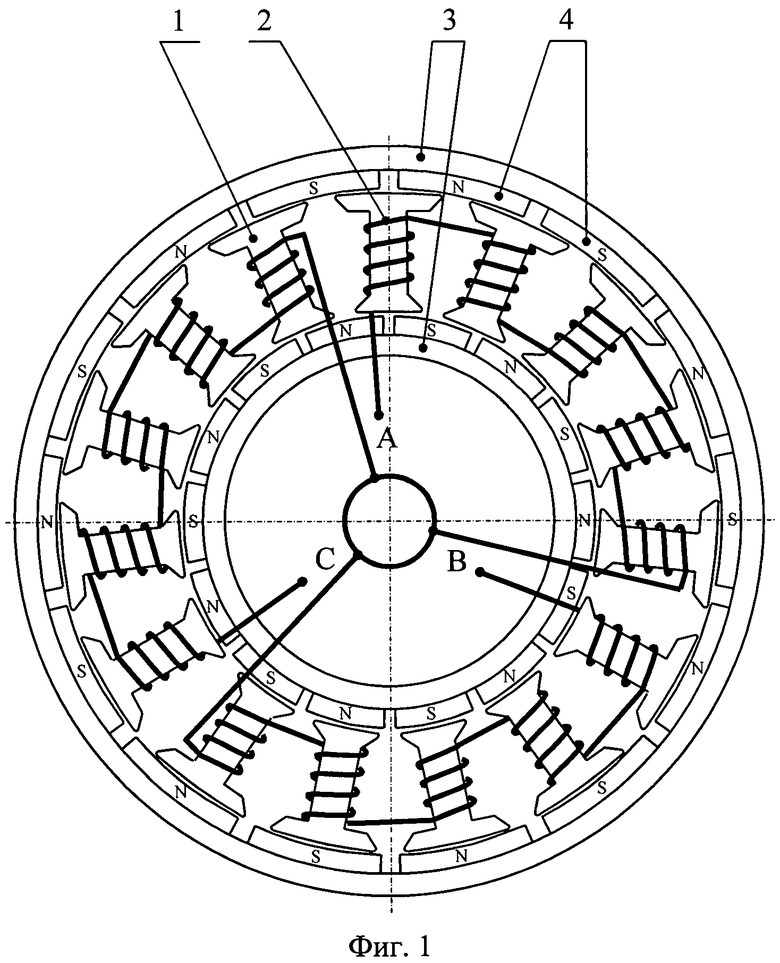
1. Электромеханический преобразователь содержащий, по меньшей мере, одну статорно-роторную пару, в которой статор состоит из сердечников из материала с высокой магнитной проницаемостью, торцами прикрепленных к опорному статорному кольцу и ориентированных параллельно основному магнитному потоку, и между которыми расположены проводники многофазной обмотки, ротор выполнен в виде двух коаксиально расположенных наружного и внутреннего индукторов-магнитопроводов из материала с высокой магнитной проницаемостью в форме полых цилиндров, закрепленных с возможностью вращения относительно статора, несущих расположенные по окружностям полюса с чередующейся полярностью, обращенные через рабочие зазоры к статору и охватывающие его, при этом полярность полюсов, расположенных на внутреннем и наружном индукторах напротив друг друга, согласная, отличающийся тем, что число пар полюсов р, число сердечников статора Z связаны соотношениями:
- для двухфазной обмотки (m=2):
для Z=у·m·k, р=(у-1)·k, (у+1)·k, где у - четное число, у≥4; k - целое положительное число;
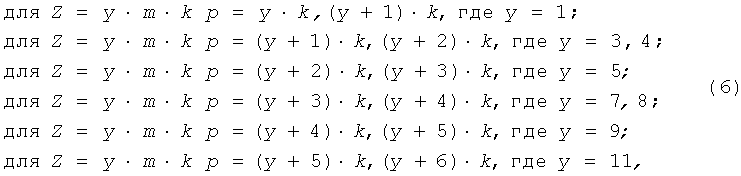
- для трехфазной обмотки (m=3) для Z=у·m·k:
p=у·k, (у+1)·k, где у=1;
p=(у+1)·k, (у+2)·k, где у=3, 4;
p=(у+2)·k, (у+3)·k, где у=5;
p=(у+3)·k, (у+4)·k, где у=7, 8;
p=(у+4)·k, (у+5)·k, где у=9;
p=(у+5)·k, (у+6)·k, где у=11,
при этом у, k - целые положительные числа.
2. Электромеханический преобразователь по п.1, отличающийся тем, что k>1.
3. Электромеханический преобразователь по п.1, отличающийся наличием датчиков углового положения индуктора, действие которых основано на эффекте Холла, расположенных на якоре и обращенных своим чувствительным элементом к индуктору.
4. Электромеханический преобразователь по п.1, отличающийся тем, что при четном k катушечные группы одной и той же фазы обмотки якоря соединены параллельно.
5. Электромеханический преобразователь по п.1, отличающийся тем, что катушечные группы одной и той же фазы обмотки якоря соединены последовательно.
6. Электромеханический преобразователь по п.1, отличающийся тем, что при четном k>2 катушечные группы одной и той же фазы обмотки якоря соединены последовательно-параллельно.
7. Электромеханический преобразователь по п.1, отличающийся тем, что обмотка якоря питается от сети переменного тока.
8. Электромеханический преобразователь по п.1, отличающийся тем, что обмотка якоря питается от управляемого инвертора, допускающего работу электромеханического преобразователя в двигательном и генераторном режимах.
9. Электромеханический преобразователь по п.1, отличающийся тем, что при m=3 обмотка якоря соединена в звезду.
10. Электромеханический преобразователь по п.1, отличающийся тем, что при m=3 обмотка якоря соединена в треугольник.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2167482C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2190292C2 |
| US 4549106 А, 22.10.1985 | |||
| GB 1466565 А, 09.03.1977 | |||
| УНИПОЛЯРНАЯ БЕСКОЛЛЕКТОРНАЯ МАШИНА | 2008 |
|
RU2367079C1 |

