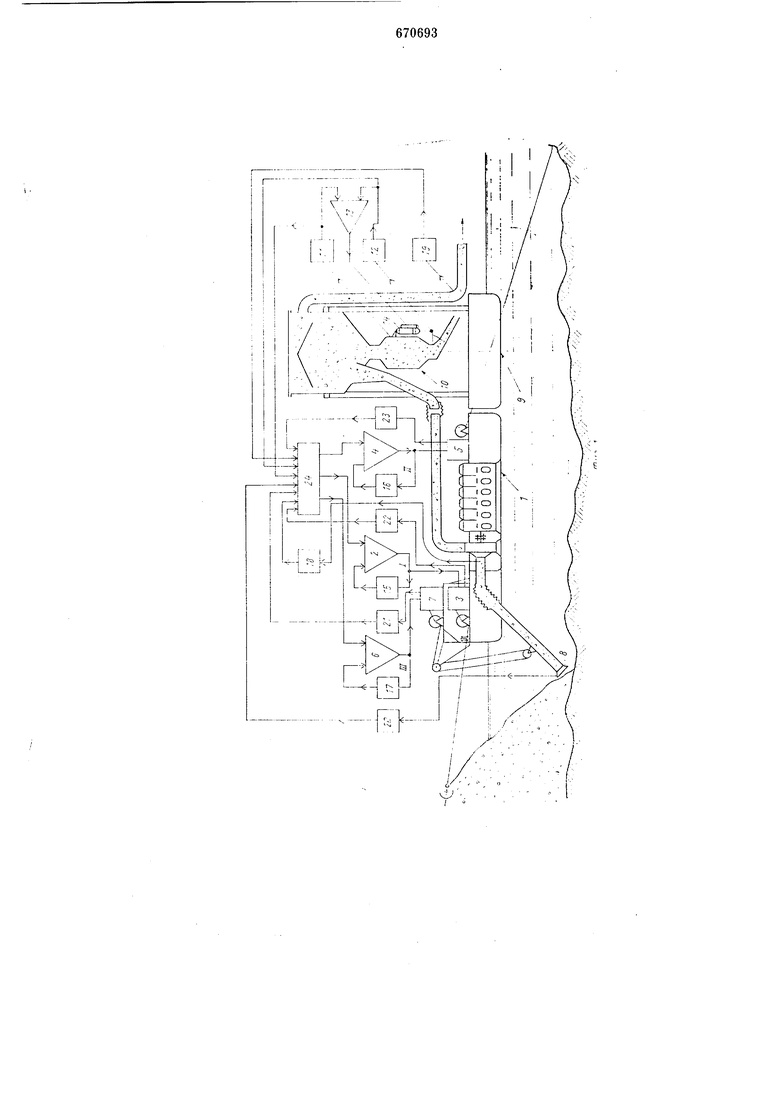
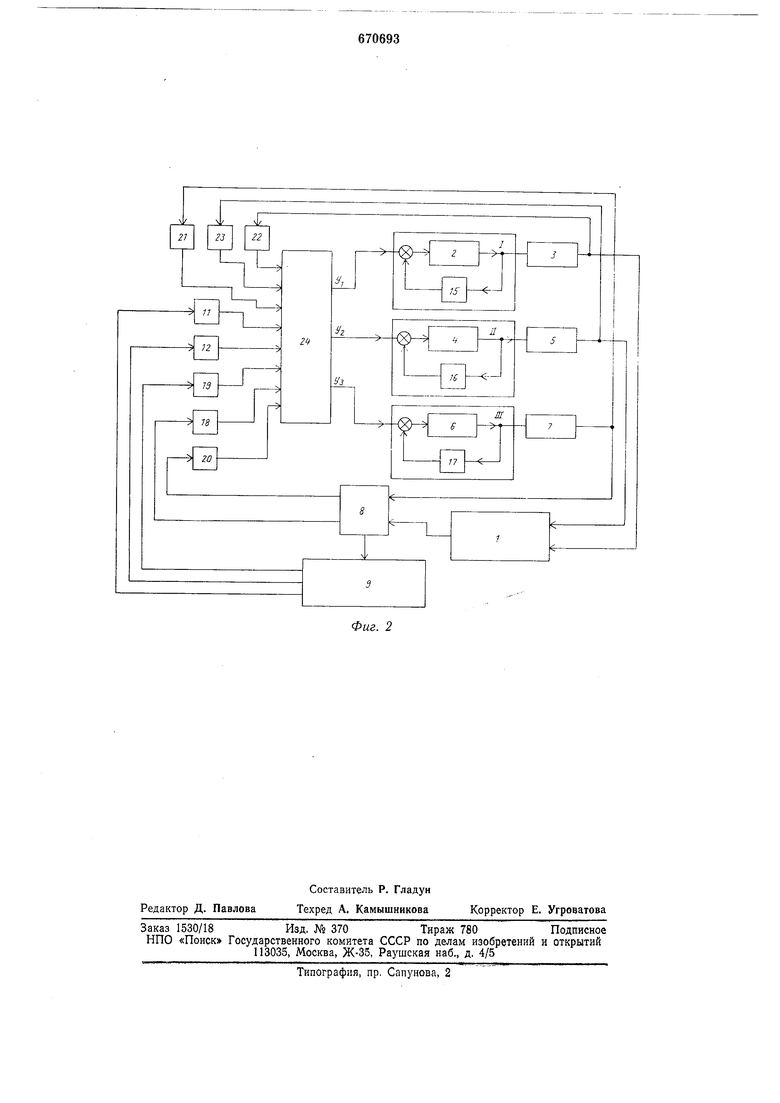
транспортных средств, отводящих полезный продукт. Перечисленные недостатки известных устройств при использовании их для управления основным технологическим процессом гидромеханизированного добывающего комплекса приводят к недонснользованию его возможностей по производительности, уносу большого количества полезного нродукта в отвал и неполной выработке карьера. Целью изобретения является повышение производительности добывающего комплекса. Это достигается тем, что устройство снабжено подключенными ко входам вычислительного устройства датчиками нанора в сливном трубопроводе гидрокласснфикатора полезного материала в накопителе, ноложения затвора разгрузочного окна накопителя, направления хода и стопорения механизмов рабочих перемещений и датчиками моментов приводов механизмов рабочих перемещений, включенными в цепи обратных связей автоматизированных систем приводов механизмов рабочих перемещений. На фиг. 1 нредставлена схема технологического комплекса; на фиг. 2 - блоксхема устройства. Устройство для управления гидромеханизированным добывающим комплексом содержит плавучий корпус 1 земснаряда, регулируемый привод 2 носовой становой лебедки 3, регулируемый привод 4 кормовой удерживающей лебедки 5, регулируемьш нривод 6 рамоподъемной лебедки 7, грунтоприемник 8, гпдроклассификатор 9, накопитель 10 полезного продукта, датчик 11 количества полезного продукта в накопителе, датчик 12 положения затвора разгрузочного окна накопителя, усилитель 13 мощности гидропривода 14 затвора разгрузочного окна накопителя, датчик 15 момента привода носовой становой лебедки, датчик 16 момента привода кормовой удерживающей лебедки, датчик 17 момента привода рамоподъемной лебедки, датчик 18 напора во , всасывающем трубопроводе землесоса, датчик 19 напора в трубопроводе для слива из гидроклассификатора жидкой фазы и сопутствующего бесполезного материала, датчик 20 положения грунтоприемника, датчик 21 направления хода и стопорения рамоподъемной лебедки, датчик 22 направления хода и стопорения носовой становой лебедки, датчик 23 кормовой удерживающей лебедки, вычислительное устройство 24. Датчики 15-17 моментов приводов 2, 4 и 6 механизмов рабочих перемещений (лебедок) 3, 5 и 7 земснаряда 1 и грунтоприемника 8 включены в цепи обратных связей, охватывающих приводы 2, 4 и 6, образующих вместе с ними автоматизированные системы регулирования I, II, III моментов, развиваемых приводами механизмов рабочих перемещений. Системы регулирования I, II, III обеепечивают стабилизацию заданных сигналами на пх входе значеннй моментов при свободпом именении частоты вращения вала привода. Входы систем I, II, III регулирования моментов приводов 2, 4 и 6 механизмов рабочих перемещений 3, 5 и 7 подключены к выходам вычислительного устройства 24, на входы которого дополнительно подключены датчики 21-23 направления хода и стопорения механизмов рабочих перемещений 3, 5, 7 и датчики 11, 12 и 19, контролирующие режим работы обогатительной установки - гидроклассификатора 9. Устройство работает следующим образом. При отсутствии материала в зоне всасывания грунтоприемника 8 потери напора во всасывающей линии землесоса малы, а напор в трубопроводе для слива из гидроклассификатора жидкой фазы и сопутствующего бесполезного материала велик, вследствие чего сумма сигналов датчиков напора 18 и 19 с разными знаками подаваемых на вход вычислительного устройства 24 имеет знак сигнала датчика 19 напора в сливном трубопроводе. При таком знаке суммы сигналов на входе вычислительного устройства 24 сигнал Уз на его выходе равен нулю, н системе стабилизацни момента III, развиваемого нриводом 6 рамоподъемной лебедки 7, задан режим работы с малым моментом, за счет чего под действием силы тяжести рама опускается и грунтоприемник 8 заглубляетея в грунт. При всасывании гидросмеси потери напора во всасывающей линии землесоса увеличиваются, и одиовременно по мере заполнения пз льной высокой концентрации нагнетательного трубопровода напор уменьшается, в результате чего сумма сигналов датчиков 18 и 19 уменьшается по модулю до нуля и меняет знак на нротивоположный. При этом заданное вычислительным устройством 24 значение момента, развиваемого приводом 6 рамоподъемной лебедки 7, увеличивается, скорость опускания рамы и заглубления грунтоприемника 8 уменьшается, становится равной нулю и при некотором значении суммы меняет знак на противоположный, т. е. нроисходит подъем рамы. Таким образом, режим всасывания и гидротранспортирования материала в гидротранспортных системах землесоса I и гидроклассификатора 9 стабилизируется при определенном соотношении параметров напора во всасывающей линии землесоса и в трубопроводе для слива из гидроклаесификагора жидкой фазы и сопутствующего бесполезного материала.
При стабилизированном объеме материала в накопителе 10 гидроклассификатора открытие поворотного затвора разгрузочного окна накопителя пропорционально притоку материала в накопитель 10, т. е. пропорционально производительности комплекса по полезному продукту.
С целью оптимизации управления технологическим режимом комплекса по критерию максимальной производительности вычислительное устройство 24 по информации датчика 12 положения затвора разгрузочного окна накопителя 10 методом динамического программирования обеспечивает автоматический поиск задания такого соотношения параметров напора во всасывающей линии землесоса 1 и в трубопроводе для слива из гидроклассификатора жидкой фазы и сопутствующего материала, при котором в данных условиях достигается максимально возможная производительность комплекса ио полезному продукту.
В случае, когда нроизводительность комнлекса лимитируется возможностями средств для погрузки полезного продукта на транспорт (это возможно при работе в карьере с большим процентным содержанием полезного продукта), объем материала в накопителе 10 может недошстимо расти, при этом сильно увеличивается унос полезного продукта по сливному трубопроводу в отвал.
С целью уменьшения гноса полезного продукта в отвал датчик 11 объема материала в иакопителе подключен на вход вычислительного устройства 24.
При сильном увеличении сигнала датчика 11 вычислительное устройство 24 корректирует заданное соотношение потерь напора по всасывающей линии землесоса и в сливном трубопроводе в сторону уменьшения интенсивиости процесса всасывания материала. За счет этого приток гидроемеси в грунтоприемник 8 и объем материала в накопителе 10 гидроклассификатора 9 уменьи1аются, и унос его в отвал также уменьшается.
Для ЛУчн1ения чистоты выработки карьера вычислительное устройство 24 реализует управление системами I, И, П1 автоматического регулирования моментов приводов 2, 4, и 6 механизмов рабочих перемещений 3, 5 и 7, обеспечивающее автоматическое ведение грунтоприемника 8 землесоса 1 по подстилающему слою карьера.
Эта функция автоматического управления реализуется следующим образом.
При наличии в зоне всасывания грунтоприемника 8 землесоса 1 материала, поддающегося разработке, и при нормальном состоянии грунтоприемника 8 вычислительное устройство 24 через посредство систему П1 стабилизации момента привода 6
рамоподъемной лебедки 7 управляет изменением глубины опускания грунтопрнсмиика 8.
При этом привод 6 рамоподъемной лебедки 7 находится в непрерывном движении, потери напора во всасу-лвающем трубопроводе землесоса велики, напор с сливном трубопроводе сравнительно мал, прпток полезного продукта в накопитель 10
гидроклассификатора 9 велик и разгрузочное окно открыто. Такому состоянию координат, зафиксированных датчиками 21, 18, 19 и 12 и переданных на вход вычислительиого устройства 24, соответствуют нули на
его выходах У| и У2. При этом ириводы 2 и 4 лебедок развивают начальные заданные моменты, и корпус 1 землесоса с Г1 дроклассифпкатором 9 неподвижно зафиксированы в забое на натянутых тросах этих
лебедок.
По мере выработки материала, еодержащего полезный продукт, грунтоприемник 8 заглубляется иложится на илотный слой подстилающего профиля карьера, ири этом
движение иривода 6 рамоподъемной лебедки 7 прекращается, и датчик 21 ее хода это фиксирует.
С прекращением подтекания в ЗОНУ всасывания грунтопрпемника 8 материала,
иоддающегоея разработке, потери напора во всасывающей линии землесоса уменьшаются, напор в трубопроводе для слива из гидроклассификатора жидкой фазы и соиутств ющего материала возрастает, ириток материала в накопитель 10 уменьшается, и его разгрузочное окно закрывается. При таком состоянии координат, зафиксированных датчиками 21, 18, 19 и 12 на выходах вычислительного устройства 24,
ноявляется «Слово, ири котором заданное значение момента, развиваемого приводом 4 кормовой удерживаю1цсй лебедки 5 уменьшается, а заданное значение момеита, развиваемого приводом 2 HOcoBOsi становой лебедки 3. возрастает. Вследствие этого иосовая лебедка 3 наматывает канат, кормовая лебедка 5 сматывает, комплекс перемещается вперед, и грунтоприемник 8 двигается по подстнлаюи1ему профилю к
откосу разрабатываемого материала.
В случае, если груитопрне шик 8 упирается, например, в выступ профиля подстилающего слоя карьера, становой трос натягивается и привод 2 останавливается, что
фнксируется датчиком 22, трос кормовой удерживающей лебедки сматывается, ослабевает, и привод 4 также останавливается - это фиксируется датчиком 23; груитоириемник 8 лежит на подстнлающем слое
и привод рамоподъемной лебедки 7 стоит- это фиксируется датчиком 21; потери напора во всасывающей линии землесоса малы, наиор в сливном трубопроводе достаточно высок, разгрузочное окно накопителя 10
гидроклассигЬикатора 9 закрыто. Таком состоянию координат, зафиксированных датчиками 22, 23, 21, 18, 19 и 12 соответств ет «Слово па выходах вычислител1.ного устройства 24, при котором на входе системы III управления приводом 6 рамонодъемиой лебедки 7 появляется сигнал, включающий лебедку на подъем грунтоприемиика 8. Грунтоприемник отрывается от подстилающего слоя, и комплекс под действием силы в натянутом тросе носовой становой лебедки 3 начинает двигаться вперед. Как только трос иосовой стаиовой лебедки 3 ослабляется настолько, что ее прнвод 2 начинает подбор слабингзг, на выходе вычислительного }ттройства 24 появляется «Слово, прн котором рамопода емная лебедка 7 опускает грунтоирпемиик 8. Таким образом, Грунтоприемник 8 автоматически обходит выступы и погружается в выемки подстилающего слоя профиля карьера, обеспечивая тем самым в карьере максимальиую чистоту выработкн материала, содержащего полезный продукт. Предлагаемое устройство для зшравления гидромеханизированным добывающим комплексом выгодно отличается от нзвестных ранее устройств зправления земснарядами. Исполнение устройства в виде автоматизированных систем I, II, 1П стабилизации моментов, развиваемых приводами механизмов рабочих иеремещений, присоединенных к выходам вычислительного устройства, и исиользоваиие дополнительных датчиков, характеризующих режим работы 1 одсистем комплекса, позволяет свести сложную задачу автоматического управления основным технологическим нроцессом большой динамической системы, которой является гидромеханизированный добывающий комплекс, к простым задачам регулирования параметров в подсистемах низHiero разряда и к оргаиизап,ии взаимодействия подсистем иизшего разряда с помощью сравннтельно простого вычислительного устройства. Исиол153оваиие дополнительных датчиков, коитролируюищх состояиие координат автоматизированных иодеистем, позволяет получить дополнительную качественно новую информацию о ходе технологического процесса и о впещних возмущениях, действующих на этот процесс, что сделало возможной реализаи.ию уиравления, обеепечивающего существенное повыщение производительности добывающего комплекса по полезному продукту. Формула изобретения Устройство для управления гидромеханизированным добываюишм комплексом, содержащее датчики иаиора во всасывающем трубопроводе и ноложения грунтонриемника землееоса, иодключеииьш ко входам вычислительного устройства, к выходам которого подключены автоматнзнрованные систе 1ы ириводов механизмов рабочих перемещений, отличающееея тем, что, с целью повыщення производительности добывающего комплекса, устройство снабжено подключенными ко входам вычислительного устройства датчиками напора в сливном трубопроводе гидроклассификатора, объема полезного материала в накопителе, ноложения затвора разгрузочного окна накопителя, направления хода и стопорения механизмов рабочих перемещений и датчиками моментов приводов механизмов рабоьих перемещений, вклЕОченными ь цепи обратных связей автоматизированных систем ириводов механизмов рабочих перемещеиий. Источники ннформации, иринятые во внимание при экспертизе 1.Авторское свидетельетво СССР № 250748, кл. Е 02F 3/88, 1967. 2.Авторское свидетельетво СССР NO 383808, кл. Е 02F 3/88, 1971. 3.Jessup G. R. «Concepts in dredge automation, «World Dredging and Marine Const, vol. 8, 1972, № 10. 4.Авторское свидетельство СССР ,Nb 340746, кл. Е 02Е 3/88, 1970.