Изобретение относится к автоматике гидромеханизмов, а именно к устройствам управления технологическими процессами землесосных снарядов.
Цель изобретения - повышение производительности работы за счет исключения работы землесосного снаряда при засорении грунтоприемника или его защитной решетки.
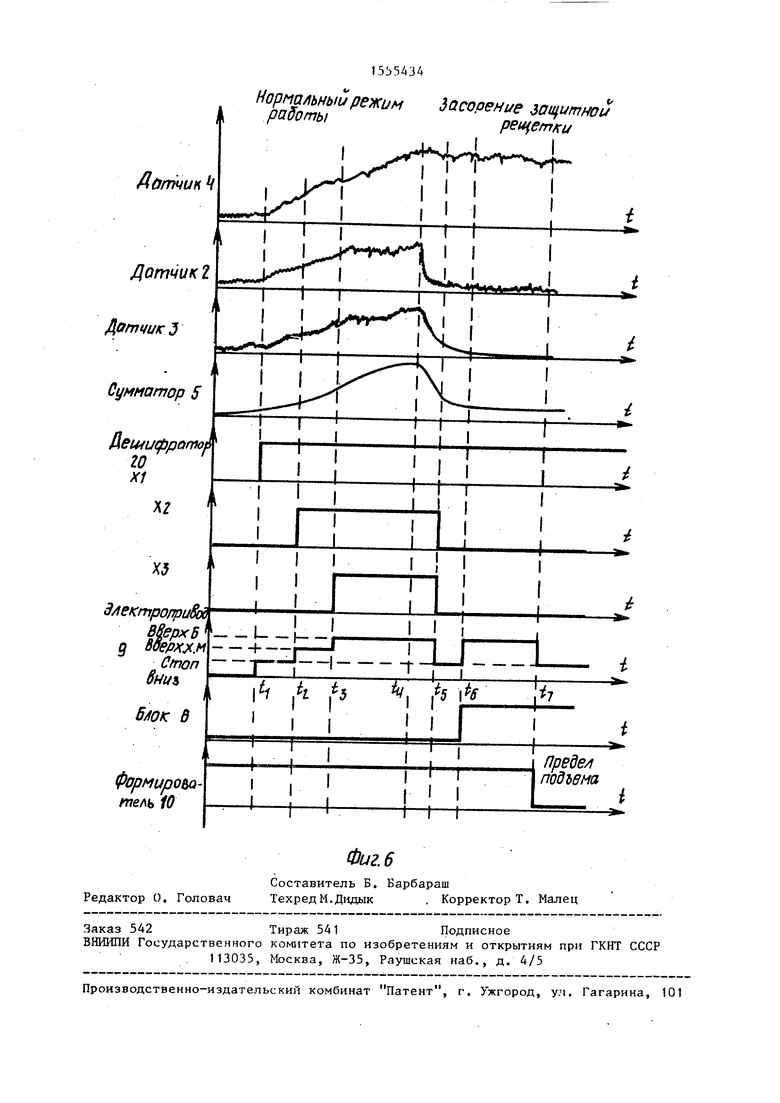
На фиг.1 приведены структурная схема устройства и функциональная схема блока задания режимов; на фиг.2 - принципиальная схема сумматора; на фиг.З - соотношение уставок второго блока компараторов} на фиг.4 - принципиальная схема формирования сигналов; на фиг.5 - подвижная ламель; на фиг.6 - временные диаграммы работы устройства.
Устройство для управления процессом грунтозабора землесосного снаряда содержит датчик 1 положения грунтоприемника, датчик 2 напора, датчик
3электропроводности пульпы, датчик
4вакуума, сумматор 5, анализатор 6 состояния грунтоприемника, блоки 7
и 8 компараторов, привод 9, формирователь 10 сигналов, элемент И 11, элементы ИЛИ-ПЕ 12-14, приводы 15 и 16, генератор 17 тактовых импульсов, элементы НЕ 18 и 19, дешифратор 20 и блока 21 задания режимов.
Большинство добывающих землесосных снарядов имеют двухскоростной привод переменного тока рамоподъем- ной лебедки. В зависимости от уровня аналогового сигнала на выходе сумматора 5 на выходах Х4, Хг и Х3 блока 7 компараторов появляется одна из комбинаций 000, 100, 110 или 111.
При отсутствии сигнала на выходе сумматора 5 U вЬ1х 0 за счет положительных смещений на входах компара
торов (уставки UUCT, U,.eT ,
Ujcr)
компараторов присутствуют О. В этой ситуации (мал
0
на выходах логические вакуум, мал напор, велика проводимость пульпы) отсутствует материал в зоне всасывания. На выходе Y,, дешифратора 20 появляется логический О и приводу 9 дается команда на опускание рамы0 С ростом ивы)( сумматора 5 сначала срабатывает один компаратор, затем два компаратора, а



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля процесса грунтозабора землесосного снаряда | 1986 |
|
SU1320336A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Устройство для управления землесосным снарядом | 1989 |
|
SU1677196A1 |
| Устройство для автоматического управления землесосным снарядом | 1985 |
|
SU1382918A1 |
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| Тренажер оператора радиоэлектронной аппаратуры | 1989 |
|
SU1658193A1 |
| Устройство для функционально-параметрического контроля логических элементов | 1985 |
|
SU1302220A2 |
| Устройство для функционально-параметрического контроля логических элементов | 1982 |
|
SU1140065A1 |



Изобретение относится к автоматизации управления технологическими процессами земснарядов. Цель изобретения - повышение производительности работы за счет исключения работы земснаряда при засорении грунтоприемника (ГП) или его защитной решетки. Для этого устройство содержит датчики (Д) напора, вакуума, положения ГП и электропроводности пульпы, генератор тактовых импульсов, формирователь сигналов, анализатор состояния ГП, сумматор, два блока компараторов (БК), два элемента НЕ, элемент И, три элемента ИЛИ-НЕ, дешифратор, блок задания режимов и три привода. Засорение ГП определяется в анализаторе состояния ГП по сигналам с Д электропроводности пульпы и Д вакуума. Сигналы с последних, а также с Д напора поступают на входы сумматора, который формирует управляющий аналоговый сигнал, поступающий на входы первого БК. По логике, определяемой элементами ИЛИ-НЕ, сигналы с выходов анализатора и первого БК поступают на входы дешифратора. На управляющий вход дешифратора поступает сигнал с формирователя сигналов, который вместе с выходными сигналами дешифратора управляет приводом рамоподъемной решетки. Сигналы о движении и положении ГП фиксируются Д положения. Перемещение земснаряда по траншее возможно, когда на входе элемента И присутствует логическая "1". Это возможно, например, при отсутствии материала в зоне всасывания, что определяется Д напора и Д вакуума, сигналы которых поступают на входы второго БК, один из выходов которого через первый элемент НЕ соединен с одним из входов элемента И. Блок задания режимов контролирует время отсутствия материала и задает режимы работы приводов механизмов рабочих перемещений. На один из входов блока задания режимов поступают импульсы от генератора тактовых импульсов. 1 з.п. ф-лы, 2 табл., 6 ил.
Блок задания режимов содержит эле
мент И 22, триггеры 23 и 24, счетчики 25 и 26, кодовые переключатели 27 и 28, элементы НЕ 29 и 30 и формирователи 31 и 32 сигнала.
Все приводы в устройстве могут быть реализованы в электромеханическом варианте.
состояния грунтопри- в соответствии с аналогичным блоком в известном устройстве.
Анализатор 6 емника выполнен
Устройство работает следующим образом.
Сумматор 5, обрабатывая информацию датчиков 2-4, формирует аналоговый сигнал (фиг.2), который может изменяться от 0 до U
макс
Весовые
коэффициенты, с которыми сигналы передаются на вход сумматора, выбираются при настройке системы. Например, на земснаряде Прага- 2 напряжение на выходе сумматора 5 равно
U
ВЫХ
- (U
Вакуума + 0,5-инап0рс|
+ 0,5-Un
роВоД
).
Сигнал с выхода сумматора 5 иеых через блок 7 компараторов подается на входы элементов ИЛИ-НЕ 12-14. Соотношения уставок компараторов UucT , UUCT и U т подбираются при настройке системы.
В табл.1 приведены значения сигналов на выходе блока 7 компараторов 7 (X,, Хй, Х) и формируемые дешифратором 20 команды (Y,, Y, Y,, Y).
5
0
В результате по четырем линиям на электропривод 9 рамоподъемной лебедки поступают сигналы Рама вниз, Стоп, Рама вверх медленно, Рама вверх быстро. Сюда же подключен первый выход формирователя 10 сигналов движения и положения грунтоприемника, который блокирует подъем рамы выше заданного предела для предотвращения аварийных ситуаций.
Датчик положения грунтоприемника выполнен на базе сельсина, который жестко закреплен в специальном брызго- защитном корпусе, а ось сельсина че- Јез рычажную передачу связана с рамой земснаряда. Датчик 1 устанавливается на корпусе земснаряда вблизи
513
точки подвеса рамы. Длина рычажных передач рассчитана таким образом,что при движении рамы от предельного верхнего положения до предельного нижнего положения ось сельсина поворачивалась не более, чем на 60-70. В зависимости от углового положения рамы, а следовательно, от величины заглубления грунтоприемника снимается сигнал переменного тока. Кроме того, с осью сельсина связана ламель которая скользит по круговому сектору с заземленными контактами. При повороте ламели на формирователь 10 поступают импульсы напряжения. Если логический О с выхода формирователя 10 сигналов подается на управляющий вход дешифратора 20, тогда на ег выходах появляются логические 1, т.е. дешифратор 20 блокируется независимо от наличия сигналов на АО-А2. При этом в электроприводе 9 рамоподъ емной лебедки отключают от схемы управления электроприводом выход дешифратора и подключают органы ручного управления, расположенные на пульте оператора земснаряда Дальнейший подъем рамы возможен только при ручном управлении.
Для снятия блокировки и включения устройства в работу следует вручную опустить раму на минимально разрешенную глубину (.обычно на 1-1,5 м ниже уровня предельного подъема рамы) . При этом на управляющий вход де шифратора 20 подается логическая 1 ,и команды на выходе дешифратора 20 формируются в зависимости от комбинации на его выходах АО-А2, согласно табл.2.
Таблица 2
При засорении грунтоприемника или егр защитной решетки с выходов блока
6 анализа состояния грунтоприемника поступают логические 1 на элементы ИЛИ-НЕ 12-14, при этом на входах АО-А2 анализатора 20 появляется комбинация 000, что соответствует подъему рамы вверх с большой скоростью. Быстрый подъем рамы проходит независимо от сигналов, присутствующих
5
0
5
0
0
Q на выходах Х, Хг, Х3 блока 7 компараторов, до момента, когда с формирователя 10 сигналов приходит логический О (.предел подъема рамы.), после чего рама останавливается и подключается ручное управление,или до момента самоликвидации засорения грунтоприемника и его защитной решетки.
Сигналы от подвижной ламели, связанной с осью сельсина датчика 1 положения грунтоприемника, поступают на формирователь 1U сигналов. Перемещение земснаряда по траншее возможно только в том случае, когда на 5 входе элемента И 11 присутствует уровень логической 1, что имеет место лишь при наличии команды Рама вниз. При всех остальных командах на этом входе элемента И 11 присутствует логический О и перемещение земснаряда по траншее запрещено.
По мере выработки материала грун- топриемник заглубляется и ложится на подстилающий слой карьера. Грунто- приемник остается неподвижным, хотя на электропривод рамоподъемной лебедки поступает сигнал на опускание рамы. При отсутствии материалов в зоне всасывания проводимость пульпы, измеряемая датчиком 3, велика, а вакуум, измеряемый датчиком 4, мал. Сигнал на выходе датчика 3 отрицательный и пропорционален сопротивлению пульпы, поэтому при отсутствии материала этот сигнал меньше положительной установки одного компаратора блока 8 компараторов, следовательно, на одном его выходе присутствует логический О, а на выходе инвертора 18 - логическая 1.
Аналогично при отсутствии в зоне всасывания сигнал снимается с датчика 4 вакуума меньше отрицательной уставки другого компаратора блока 8 компараторов.
Таким образом, когда в зоне всасывания отсутствует материал и требуется движение земснаряда вперед, рама неподвижна, но есть сигнал на
опускание, то при этой ситуации на всех четырех входах логического элемента И 11 присутствуют логические 1. Блок 21 задания режимов контролирует время сохранения этой ситуации и задает режимы работы механизмов рабочих перемещений.
Время контроля задается с помощью кодового переключателя 27. При появлении на выходе элемента И 11 логической 1 она записывается в D-триггер 23 и на его Q-выходе появляется логическая 1. Реверсивный счетчик 25 начинает обратный счет тактовых импульсов, поступающих с генератора 17 тактовых импульсов. В момент, когда содержимое счетчика становится равным нулю, на выходе счетчика Ј0 появляется отрицательный импульс, устанавливая на Q-выходе D-триггера 24 логическую 1, на Q-выходе - логический О. Сигналы с выходов Q и Q D-триггера 24 через элементы НЕ 29 и 30 и формирователи 31 и 32 сигнала поступают на электроприводы 15 и 16 механизмов рабочих перемещений. При этом становая носовая лебедка начинает наматывать трос а кормовая становая - отматывать. Земснаряд начинает перемещаться вперед. Время работы механизмов рабочих перемещений задается кодовым переключателем 28 и контролируется реверсивным счетчиком 26. При наличии на Q-выходе триггера 24 логической 1 происходит счет импульсов, поступающих на вход -1 счетчика 26. С приходом каждого тактового импульса с генератора 17 тактовых импульсов содержимое счетчика 26 уменьшается на единицу. В момент, когда, содержимое счетчика становится равным нулю, на его выходе VO появляется отрицательный импульс, который переводит блоки 21 задания режимов в исходное состояние, записывая в счетчики 25 и 26 время задержек, задаваемое кодовыми переключателями 27 и 28, механизмы рабочих перемещений при этом останавливаются.
При отсутствии материала в зоне всасывания сигналы с датчиков малы, сигнал на выходе сумматора 5 равен О, -сигналы на выходах Х4, Х2, Х, компараторов равны 0 и электроприводу 9 формируется команда Рама вниз, при этом грунтоприемник и .решетка не засорены - на выходе фор
0
5
0
5
0
5
0
5
мирователя 10 сигналов логическая 1. Рама начинает опускаться на грунт. При этом растут сигналы с датчиков. По мере роста сигнала на выходе сумматора 5 срабатывает первый компаратор, затем второй и третий, соответственно электроприводу 9 формируются команды Стоп, Рама вверх медленно и Рама вверх быст- ро.
Засорение решетки грунтоприемни- ка характеризуется сравнительно высоким вакуумом и малой консистенцией, т.е. малым сигналом с датчика 3 электропроводности пульпы (с момента t). При этом падает сигнал на выходе регулятора и рама останавливается (момент ts).
Блок 6 анализатора состояния грунтоприемника выявляет ситуацию засорения и в момент t6 выставляет на своем выходе логическую 1. В соответствии с этим на выходе дешифратора 20 появляется команда Рама вверх быстро. Рама поднимается до 3-4 м от поверхности воды, после чего на выходе формирователя 10 сигналов движения и положения грунтоприемника появляется логический О, блокирующий дальнейший подъем рамы.
Аналогично устройство работает при ситуации Засорение грунтоприемника, принудительный подъем рамы по сигналу анализатора 6 состояний грунтоприемника независимо от сигналов датчиков о
Формула изобретения
Q два счетчика, два кодовых переключателя, два элемента НЕ, два формирователя сигнала и элемент И, выход которого соединен с первым входом первого триггера, выход которого сое5 динен с первым входом первого счетчика, выход которого соединен с первым входом второго триггера, первый выход которого соединен с первым входом второго счетчика и через послеQ довательно соединенные первый элемент НЕ и первый формирователь сигнала - с одним из выходов устройства, первый вход элемента И является входом устройства и соединен с вторым
5 входом второго триггера и вторым
входом первого триггера, третий вход которого является вторым входом устройства и соединен с вторыми входами первого и второго счетчиков, выход
0 второго счетчика соединен с вторым входом элемента И и третьим входом второго триггера, второй выход которого через последовательно соединенные второй элемент НЕ и второй формирователь сигнала соединен с другим выходом устройства, выходы первого и второго кодовых переключателей соединены с остальными входами первого и второго счетчиков соответственно.
5
+Ш
вакуума йвакуума Ь
Усилитель - дормироВатель 1
Отдатчика 2
Гналора -CZBHH4
От датчика з
VnpoBod УФЗ
Фиг. 2
Ьа
-- Щ КВ +Ш
УФг
ФигЭ
ГТ1 4
. г&
-«17 2ПОЗ
гш
онпэч/ээ
шо
Нормальный режим Засорение защитной раоотыоешртг,,
рещетки
Датчик Ц
Датчик 2 Датчик J
Сумматор 5
иеишсррснпо.
10 Л7
хг
Х5
Электропри&й
88ерхБ д Вберхх.м
Стоп вниь
foot В
формиром- тель 10
Редактор О. Головач
Составитель Б. Барбараш
ТехредМ.Дидык . Корректор. Малец
ие защит оешртг,,
рещетки
Фиг. 6
| Устройство для контроля процесса грунтозабора землесосного снаряда | 1986 |
|
SU1320336A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления гидромеханизированным добывающим комплексом | 1977 |
|
SU670693A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
