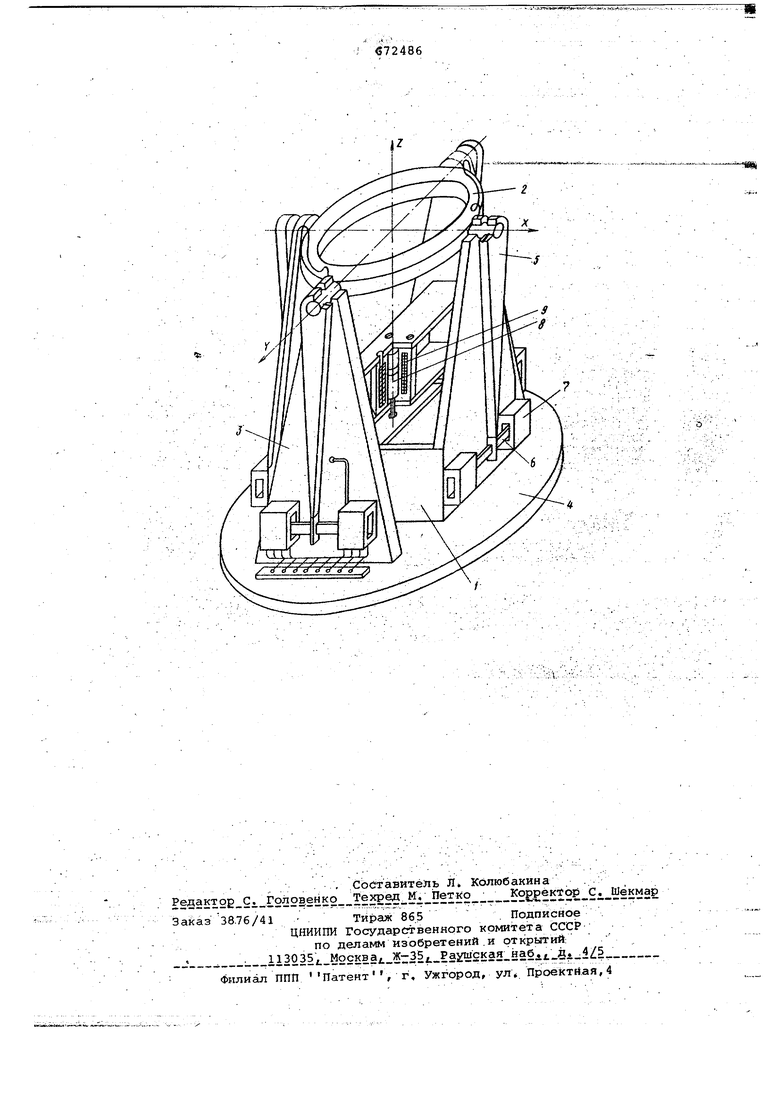
(54) ДАТЧИК УГЙА НАКЛОНА ОБЪЕКТА В ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ редственно на маятнике - для измер.ения углов наклона по однойкомпоненте и на опорных стойках шарнирной крестрвины - для намерения угла наклона по другой компоненте. Таким , движению маятника препятствует .тЬлько (Момент трения в подшипниках подвески маятника. На чертеже изображен общий вид : датчика, Мдятник 1 подвешен на шарнирной. крестовине 2,. которая осями,перпендикулярными к оси подвеса маятника эакреплена в подшипниках стоек 3, жестко прикрепленных к основанию ,4 датчика. На осяхкрестовины жестко закреплены парные стрелки 5, несущие на своих концах ферромагнитные сердечники б, взаимодействующие fe кй- тушками 7 индуктийности преобразователей перет щения в электрический „ сигнал. -,-, Парные стрелки имеют разную длину благодаря чему s сочетании о парЭметрами катушек индyктивнoctи уёейичивают диапазон линейности характеристик Датчика, что обесзпечивает требуемую точность всем диапазоне измерений В нерабочем состоянии маятник застопорен стопором 8 электромагнитного привода 9. Предельные углы отклонения маятника ограничены соответствующими упорами. Для обеспечения демпфиров ния нижняя часть маятника по1тру жена ванну с жидкостью. (. не показано). Датчик работает следующим образом. После прохождения сейсмовзрывной волны большой интенсивности поддается пйтание на электромагнитный привод и стопор освобождает ма:ятник. При;на клонах объектива, а следовательно, и основания датчика относительно оси X на тот же угол наклоняется и кресговина,а вместес ней и жестко закрепленные на ее оси парйые сТрёйкк, несущие ферромагнитные сердечники Маятник, подвешенный на оси X кресто вина, будет сохранять свое вертикаль ное положение, а следовательно, от67248f. носительное расположение сердечника и катушек индуктивности преобразователя перемещения в электрический -сигнал изменится, что определит угол поворота массива грунта или объекта относительно оси Z. При наклоне датчика относительно оси Y на тот же угол отклонится основание с опорными стойками, а парные стрелки, закрепленные на оси крестовины, будут оставаться в плоскости ijследоватёльнр, из менится взаимное р аСпЬложение катушек и сердечника,что и определит угол поворота относи ельно оси 2 . С цельк уменьшения момента трения пЪдвеска маятника и крестовины выполнена на подшипниках качения. Формула изобретения Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях, СбДёржащий основание с опорными стойками, чувствительный элемент в виде Свободно подвешенного маятника, преОбразовател1г перемещения в электри ческий сигнал и демпфер, о т л и ч и и с я тем, что, с целью повышения точности измерений, подвеска Маятникавыполнена на шарнирной кресТОвйНё, на взаимно перпендикулярных осях которой жестко закреплены стрелки, -несущиена своих концах ферромагнитные сердечники преобразователей перемегЦёния, а их KaTSMKH индуктивности размещены непосредственно на маятнике для измерения угла наклона по одной компоненте и на опорных стойках шарнирной Крестовины - для измерения угла наклона по другой компоненте. Источники информации, принятые; во внимание при- экспертизе 1.Патеьт Великобритании № 1210474 кл. G 1 F, 1970. 2.Авторское свидетельство СССР 491825, кл. GOi С 9/02, 1973. 3.Авторское свидетельство СССР №251840, кл.аО С 9/12, 19G8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1980 |
|
SU901818A2 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1982 |
|
SU1044980A2 |
| Устройство для определения угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1981 |
|
SU1024720A1 |
| Устройство для измерения угла наклона | 1981 |
|
SU972213A1 |
| Устройство для определения угла наклона | 1978 |
|
SU792074A1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК НАКЛОНА | 1971 |
|
SU316931A1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1985 |
|
SU1328672A1 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ АНТЕНН И ПРИБОРОВ СУДОВОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2008 |
|
RU2375792C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| ИНЕРЦИАЛЬНЫЙ УГЛОМЕР | 1980 |
|
SU1840400A1 |