Известны маятниг овые сейсмографы, вибрографы, виброметры для определения измерения и регистрации различных периодических колебательных процессов, которые имеют большой период собственных колебаний и позволяют с большой точностью анализировать колебания, ирО1 сходяш,ие при частотах порядка единиц и десятых долей герца. В этих приборах для анализа горизонтальных компонентов колебаннй низкая частота собственных колебаний достигается применением специальных подвесов, например упругого подвеса для астатическога маятника.
Применение этих инструментов ограничено из-за того, что устанавливаться они должны строго горизонтально, по двум взаимно нерпендикулярным точным уровням, так как незначительное отклонение инструмента от вертикали смещает в горизонтальной плоскости направление колебаний измеряемого компонента и резко повышает частоту его собственных колебаний.
Описываемый подвес для горизонтальных сейсмометрических ннстру.ментов отличается от известных тем, что он выполнен в виде трех звенного шарнирного механизма, среднее звено которого нредназна4eiiO для закрепления инерционной массы, а два крайних звена шариирно связаны: один - с верхней, а второй - с нижней опорами подвеса, обеспечивая возможность перемещения инерционной массы и одной плоскости. Это позволяет получить низкую частоту собственных колебаний ииерционной массы инструмента.
№ 67333
Для возможности изменения частоты собственных колебаний инерционной массы в некоторых нределах среднее звено трехзвенного шарнирного механизма связано с инерционной массой с возможностью перестановки последней вдоль звена.
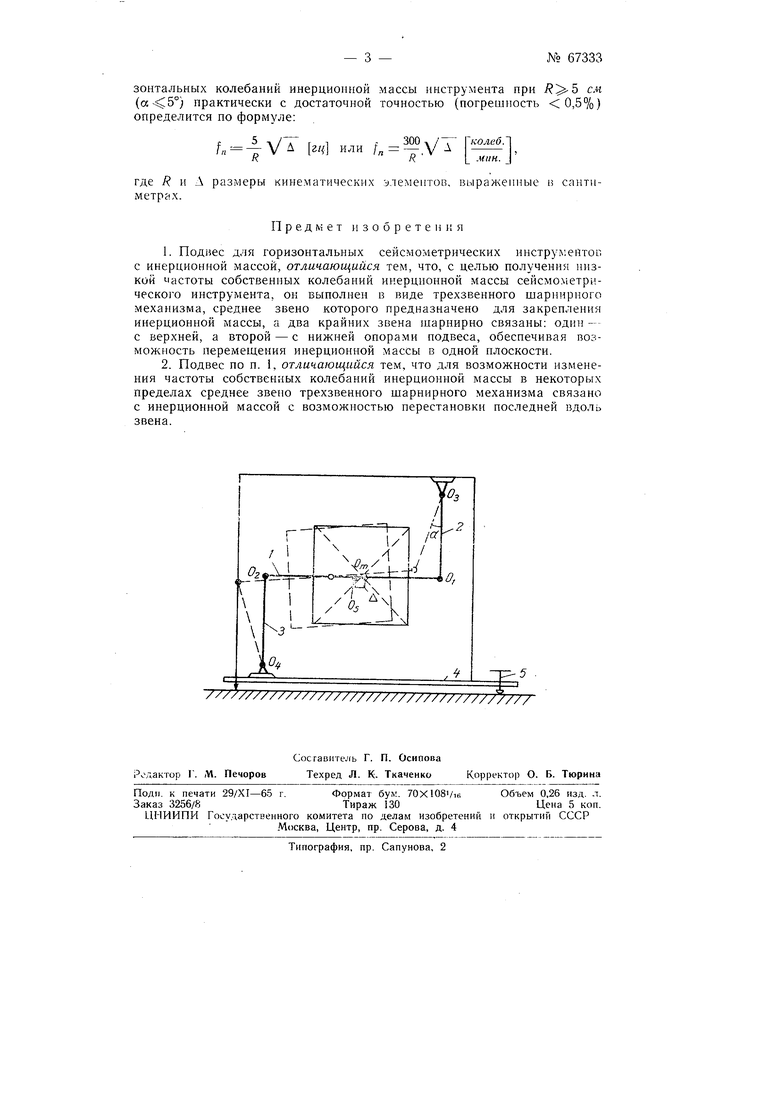
На чертеже изображена нринципиальная схема предлагаемого подвеса.
Жесткая штанга 1 представляет среднее звено трехзвенного шарнирного механизма и поддерживается в горизонтальном положении при HOMOHW подвески 2 и стойки 3, являющихся крайними звеньями трехзвенного maprinpiioro механизма и шарнирно-связанных со штангой / в точках 0,1 и 0-2, являюш,ихся шарнирами, и с опорой 4 нодвеса (корпусом) инструмента в точках Оз и 0 (также шарниры). Опора 4 подвеса имеет один установочный винт 5. На горизонтальной штанге / находится инерционная масса т, расположенная так, что ее центр тяжести Ода совпадает с продольной осью пгганги /. Инерционная масса -т может перемещаться вдоль плтангн 1 и закрепляться на ней прн различных положеннях центра тяжести Ощ инерционной массы m между серединой горизонтальной 1нта1;ги и подвижным шарниром Oi подвеса.
Благодаря шарнирам в точках Од, 0-, Оо и 04 инерционная масса т вместе с горизонтальной штангой У нодвеса может смещаться влево или вправо от 1 екоторого среднего положения нодвеса в корпусе инструмента, которое определяется параллельностью подвески 2 и стойки 3 и перпендикулярностью их к горизонтальной штанге, параллельной основанию опоры подвеса.
Необходимым соотношением размеров кинематических элементов является;
O,j . О; О.. 04 О,-, Oi 0-,. О.,
т. е. длина стойки подвески должна быть одинакова и равна (или меньше) половины длины горизонтальной штангн.
Геометрическое положение шарниров Оз и 04 на опоре нодвеса определяется расстоянием между ними по горизонтали, равным длине штанги /, а tio вертикали суммой длин подвески 2 и стойки 3.
В конструктивном отношении подвес представляет собой следующее: горизонтальная штанга - стальной, круглого сечения стержень, вдоль которого может смещаться инерционная масса - стальной груз Цилиндрической формы. Стойка и подвеска выполнены в виде стальных жестких рамок, плоскость которых перпендикулярна плоскости движения пОДв1еса (плоскости чертежа).
Шарниры 0,1, Оа и 04 выполнены в виде стальных конических полуосей (для впбротехнических инструментов) или в виде призменных сочленений по тину ножевого подвеса (для сейсмометрических инструментов).
Частота собственных горизонтальных колебаний инертной массы инструмента с эллиптическим подвесом зависит от геометрических размеров элементов подвеса и изменяется с изменением положения центра тяжести инерционной массы на горизонтальной П1танге (относительно ее середины).
Если принять и обозначить:
ОзО, ОдО, OiOs 0,04 R,
А расстояние между центром тяжести инерционной массы и серединой горизонтальной штанги Os равным Д, то частота „ собственных горизонтальных колебаний инерционной массы инструмента нри см ) практически с достаточной точностью (погрешность 0,5%) определится по формуле:
5 л/Т Г 1f 300 л/Y ГколебЛ
И или f. -j.V -
где н А размеры кинематических элементов, выраженные в сантиметрах.
Предмет н з о б р е т е н и я
1.Поднес для горизонтальных сейсмометрических инструментоп с инерционной массой, отличающийся тем, что, с целью получения низкой частоты собственных колебаний инерционной массы сейсмометрического инструмента, он выполнен в виде трехзвенного шарнирного механизма, среднее звено которого предназначено для закрепления инерционной массы, а два крайних звена шарнирно связаны: один с верхней, а второй - с нижней опорами подвеса, обеспечивая возможность перемещения инерционной массы в одной плоскости.
2.Подвес по п. 1, отличающийся тем, что для возможности изменения частоты собственных колебаний инерционной массы в некоторых пределах среднее звено трехзвенного шарнирного механизма связано с инерционной массой с возможностью перестановки последней вдоль звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для измерения вибраций | 1943 |
|
SU65260A1 |
| Устройство для возбуждения колебаний маятника Фуко | 1941 |
|
SU65446A1 |
| СИДЕНЬЕ ВИБРОЗАЩИТНОЕ | 1998 |
|
RU2137626C1 |
| ОПОРА СЕЙСМОСТОЙКОГО СООРУЖЕНИЯ | 2010 |
|
RU2427693C1 |
| Устройство для подвеса маятника сейсмометра | 1976 |
|
SU612198A1 |
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
| Устройство для гашения колебаний | 2017 |
|
RU2668933C1 |
| ОПЕРАТОРСКИЙ КРАН | 2003 |
|
RU2250194C1 |
| ОПОРА СЕЙСМОСТОЙКОГО СООРУЖЕНИЯ | 2009 |
|
RU2405096C1 |
