(54) ПРИВОД ПОДЬЕМНИКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подъемника | 1981 |
|
SU977349A2 |
| МЕХАНИЗМ ПОВОРОТА | 1994 |
|
RU2083474C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2345257C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2416747C2 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ВАЛОВ ОТБОРА МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2025305C1 |
| ШАРНИР МАНИПУЛЯТОРА С РЕГУЛИРУЕМОЙ БЕЗЗАЗОРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2497658C1 |
| МОТОРНО-ТРАНСМИССИОННЫЙ МОДУЛЬ | 2011 |
|
RU2478045C1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
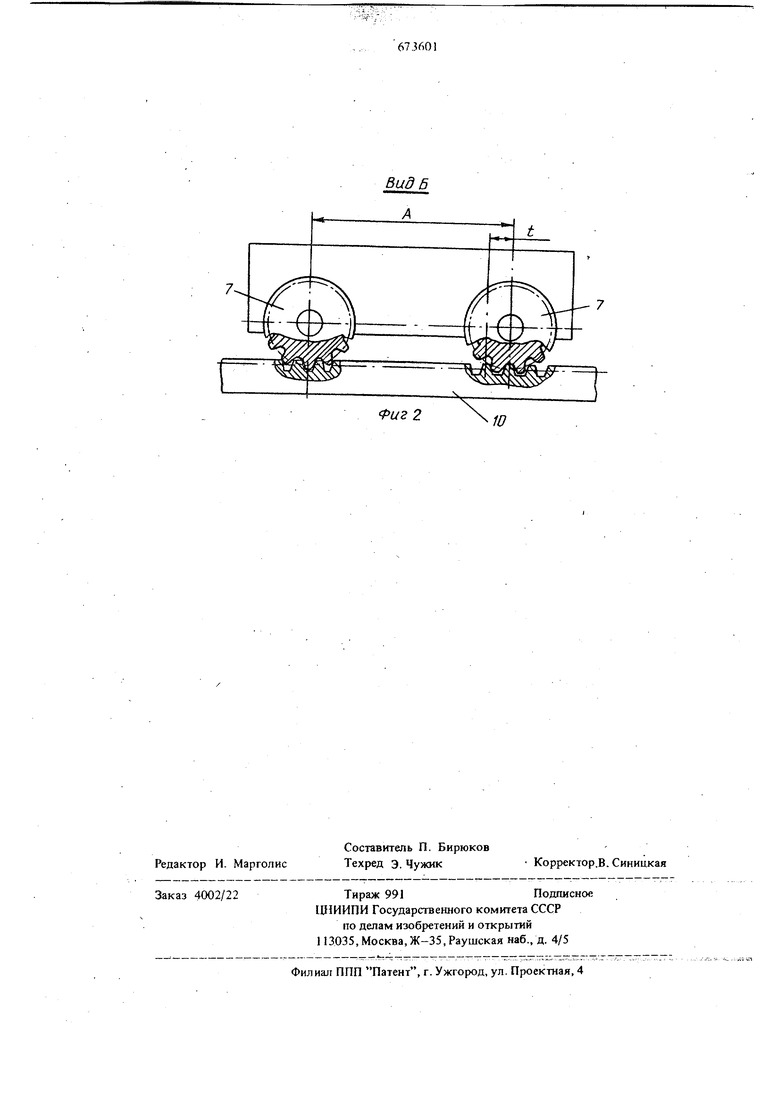
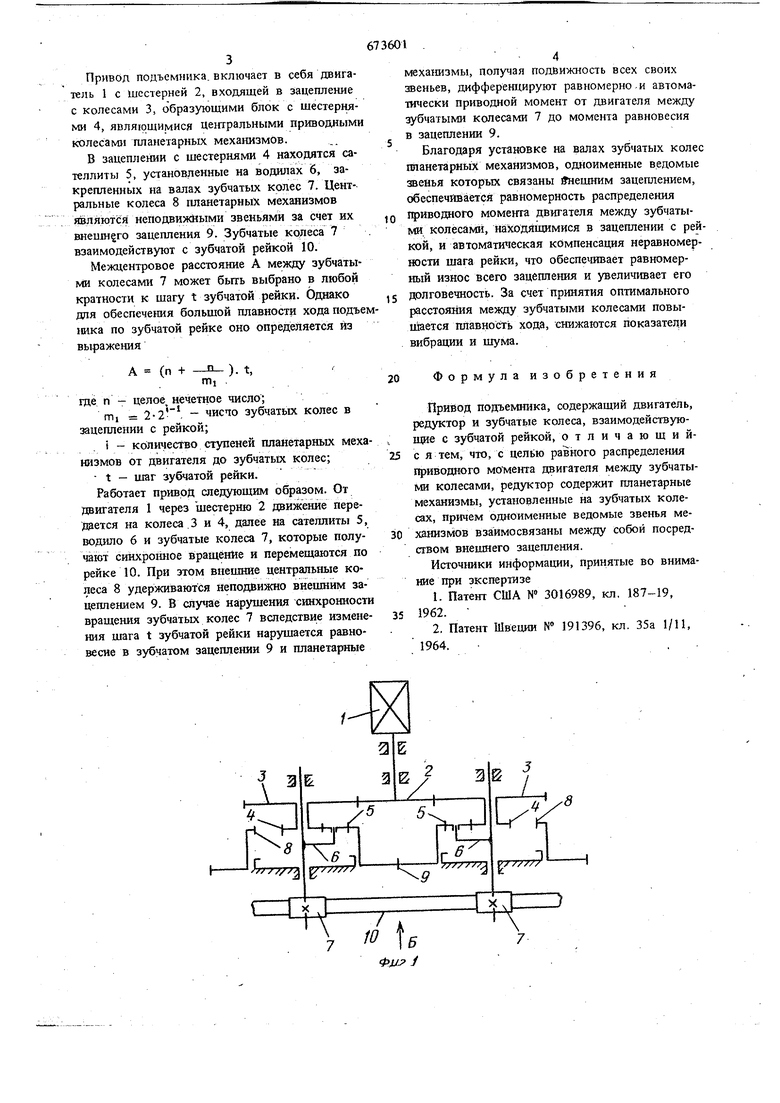
Изобретение относится к подъемным механизмам, а более конкретно к шахтным монорельсовым подъемникам, перемещающимся по зубчатой рейке. Известен приводной механизм для подъемника с зубчатой рейкой. Такой приводной механизм содержит зубчатые колеса, входящие в зацепление с зубчатой рейкой, получакацие вращение от двигателя через редуктор. Как правило, с целью увеличения надежности рабоп 1, в зацеплении с рейкой находятся одновременно несколько синхронно вращающихся зубчатых колес 11. Однако перемещение подъемников по зубча той рейке в таком устройстве сопровождается толчками, возникающими при входе и выходе зубьев зубчатых колес из зацепления с рейкой Наиболее близким к изобретению из, известных рещений по функциональным и коцструктивным признакам является устройство привод ного механизма для подъемника, в котором синхронизация вращения зубчатых колес осуще влена за счет жесткой связи червяков червяч ных передач редуктора. При этом для компенсации неравномерности щага зубчатой рейки (недостатки технологии изготовления, сборки налипания горной мелочи и т.п.) венцы червячных колес редуктора установлены на ступицах через упругие элементы (2. Однако зто устройство не позволяет равномерно распределить приводной момент двигателя между синхронно вращающимися зубчатыми колесами, так как деформация элементов различна из-за неравномерности шага зубчатой рейки. Неравномерность распределения нагрузки на зубчатые колеса вызьшает интенсивный износ зубчатого зацепления. Цель изобретения - равное распределение приводного момента двигателя между зубчатыми колесами. Эта цель достигается тем, что редуктор предлагаемого привода содержит планетарные механизмы, установленные на зубчатых колесах, причем одноименные ведомые звенья механизмов взаимосвязаны между со.бой посредством внешнего зацепления. На фиг. 1 изображена схема привода подъемника; на фиг. 2 - реечное зацепление, вид сбоку. Привод подъемника, включает в себя двигатель 1 с Шестерней 2, входящей в Зацепление с колесами 3, образующими блок с щестернями 4, являющимися Центральными приводными колесами планетарных механизмов. В зацеплении с шестернями 4 находятся сателлиты 5, установленные на водилах 6, закрепленных на валах зубчатых колес 7. Центральные колеса 8 планетарных механизмов являются неподвижными звеньями за счет их внешнего зацепления 9. Зубчатые колеса 7 взаимодействуют с зубчатой рейкой 10. Межцентровое расстояние А между зубчатыми колесами 7 может быть выбрано в любой кратности к шагу t зубчатой рейки. Однако для обеспечения большой плавности хода подъе ника по зубчатой рейке оно определяется из выражения А (п + ще п - целое, нечетное число; т, 22 - чиспо зубчатых колес в зацеплении с рейкой; i - количество ступеней планетарных меха низмов от двигателя до зубчатых колес; t - шаг зубчатой рейки. Работает привод следующим образом. От двигателя 1 через шестерню 2 движение передается на колеса.3 и 4, далее на сателлиты 5, водило 6 и зубчатые колеса 7, которые получают синхрошое вращение и перемещаются по рейке 10. При этом внешние центральные колеса 8 удерживаются неподвижно внешним зацеплением 9. В случае нарушения синхронности вращения зубчатых колес 7 вследствие изменения шага t зубчатой рейки нарушается равновесие в зубчатом зацеплении 9 и планетарные меха1шзмы, получая подвижность всех своих звеньев, дифферешшруют равномерно-и автоматически Приводной момент от двигателя между зубчатыми колесами 7 до момента равновесия в зацеплении 9. Благодаря установке на валах зубчатых колес планетарньЬс механизмов, одноименные ведомые звенья которых связаны внешним зацеплением, обеспечивается равномерность распределения приводного момента двигателя между зубчатыми колесаш, находяшимися в зацеплении с рейкой, и автоматиюская компенсация неравномерности шага рейки, что обеспечивает равномерный износ всего зацепления и увелич юает его долговечность. За счет принятия оптимального расстояния между зубчатыми колесами повышается штавность хода, снижаются показатели вибрации и шума. Формула изобретения Прийод подъемника, содержащий двигатель, редуктор и зубчатые колеса, взаимодействуюцще с зубчатой рейкой, отличаюшийс я тем, что, с целью равного распределения приводного момента двигателя между зубчатыми колесами, редуктор содержит планетарные механизмы, установленные на зубчатых колесах, причем одноименные ведомые звенья механизмов взаимосвязаны между собой посредством внешнего зацепления. Источники информации, принятые во внимание при экспертизе 1.Патент США Г 3016989, кл. 187-19, 1962. 2,Патент Швеции N 191396, кл. 35а 1/11, 1964.
Риг 2
