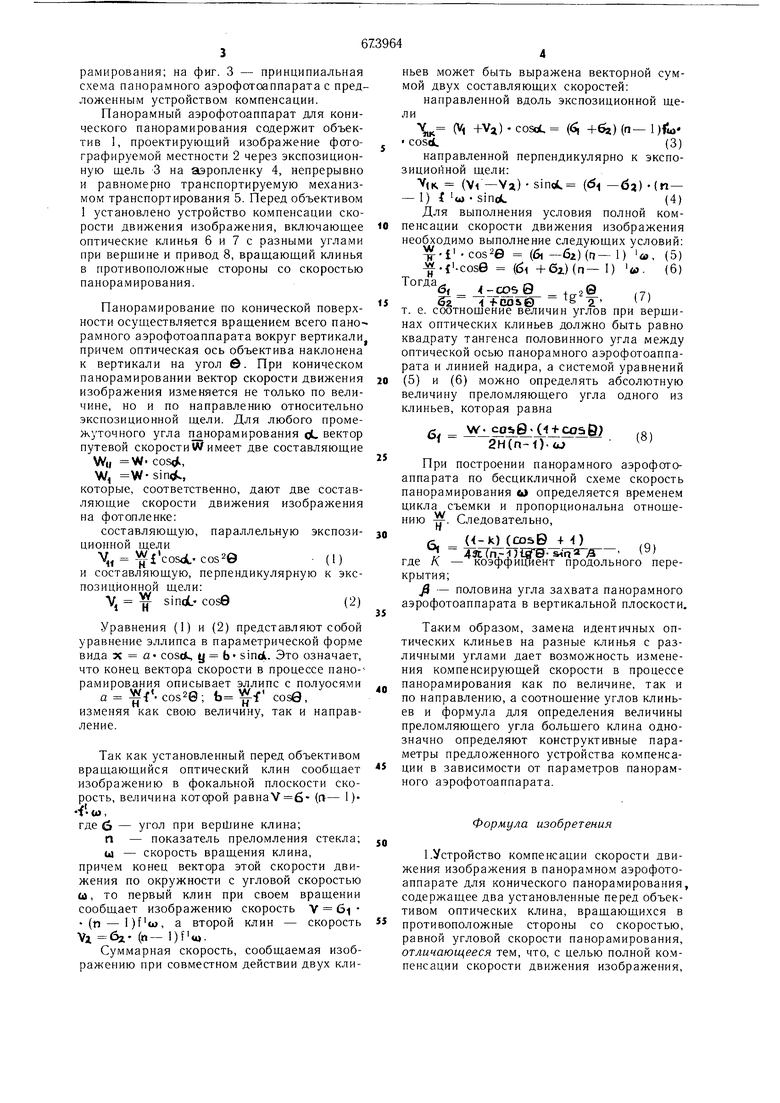
(54) УСТРОЙСТВО КОМПЕНСАЦИИ СКОРОСТИ ДВИЖЕНИЯ ИЗОБРАЖЕНИЯ рамирования; на фиг. 3 - принципиальная схема панорамного аэрофотоаппарата с предложенным устройством компенсации. Панорамный аэрофотоаппарат для конического панорамирования содержит объектив 1, проектирующий изображение фотографируемой местности 2 через экспозиционную щель 3 на аэропленку 4, непрерывно и равномерно транспортируемую механизмом транспортирования 5. Перед объективом 1 установлено устройство компенсации скорости движения изображения, включающее оптические клинья 6 и 7 с разными углами при вершине и привод 8, вращающий клинья в противоположные стороны со скоростью панорамирования. Панорамирование по конической поверхности осуществляется вращением всего панорамного аэрофотоаппарата вокруг вертикали причем оптическая ось объектива наклонена к вертикали на угол &. При коническом панорамировании вектор скорости движения изображения изменяется не только по величине, но и по направлению относительно экспозиционной щели. Для любого промежуточного угла панорамирования oL вектор путевой скорости W имеет две составляющие Wu W. cos, W, W-sin«, которые, соответственно, дают две составляющие скорости движения изображения на фотопленке: составляющую, параллельную экспозиционной щели 4i - icosdlcos e (I) и составляющую, перпендикулярную к экспозиционной щели: V, sind- созв(2) Уравнения (1) и (2) представляют собой уравнение эллипса в параметрической форме вида X а cosds у Ь sind. Это означает, что конец вектора скорости в процессе панорамирования описывает эллипс с полуосями а . COS20; Ь -f созв, изменяя как свою величину, так и направление. Так как установленный перед объективом вращающийся оптический клин сообщает изображению в фокальной плоскости скорость, величина которой равнаУ б- (о- ) itt), где 6 - угол при верШине клина; п - показатель преломления стекла; U - скорость вращения клина, причем конец вектора этой скорости движения по окружности с угловой скоростью us, то первый клин при своем вращении сообщает изображению скорость V 6i (п - l)fw, а второй клин - скорость . (n-l)fi«,. Суммарная скорость, сообщаемая изображению при совместном действии двух клиньев может быть выражена векторной суммой двух составляющих скоростей: направленной вдоль экспозиционной щели, (Vi +УЯ) . cosoL (6; +6z) (п- 1) cosdL(3) направленной перпендикулярно к экспозициойной щели: VlK (Vi -Va)-sinet (5 -бз) -(п- - 1) f « (4) Для выполнения условия полной компенсации скорости движения изображения необходимо выполнение следующих условий: i-cos e (61 -6z)(rj-1) «, (5) f-cose (61 +6i)( l::cos8 .0,,, 62 i tЮ&© ё 2 T. e. соотношение величин углов при вершинах оптических клиньев должно быть равно квадрату тангенса половинного угла между оптической осью панорамного аэрофотоаппарата и линией надира, а системой уравнений (5) и (6) можно определять абсолютную величину преломляющего угла одного из клиньев, которая равна л РА0:1 ±соз б2 2H(n-i)-,j При построении панорамного аэрофотоаппарата по бесцикличной схеме скорость панорамирования ь определяется временем цикла съемки и пропорциональна отнощению . Следовательно, («-k) (COSB + О.q, 7 - T3 n JJWB-- y S 9 где А - коэффициент продольного перекрытия;j3 - половина угла захвата панорамного аэрофотоаппарата в вертикальной плоскости. Та«им образом, замена идентичных оптических клиньев на разные клинья с различными углами дает возможность изменения компенсирующей скорости в процессе панорамирования как по величине, так и по направлению, а соотношение углов клиньев и формула для определения величины преломляющего угла большего клина однозначно определяют конструктивные параметры предложенного устройства компенсации в зависимости от параметров панорамного аэрофотоаппарата. Формула изобретения 1.Устройство компенсации скорости движения изображения в панорамном аэрофотоаппарате для конического панорамирования, содержащее два установленные перед объективом оптических клина, вращающихся в противоположные стороны со скоростью, равной угловой скорости панорамирования, отличающееся тем, что, с целью полной компенсации скорости движения изображения. обусловленной перемещением носителя, оптические клинья выполнены с различными углами при вершинах клиньев, причем отношение этих углов равно квадрату тангенса половинного угла между оптической осью фотоаппарата и линией надира. 2. Устройство по п. 1, отличающееся тем, что величина угла большего клина определяется зависимостью д Wcoe0C + COS0; где (э- угол при вершине клина (рад), путевая скорость носителя (л/с);
След оптичвсной оси на местности Н - высота полета носителя (лг); (д - угловая скорость панорамирования Q - угол между оптической осью фотоппарата и направлением надира. Источники информации, принятые во вниание при экспертизе 1.Патент США № 3221625, кл. 95-12.5, 1965. 2.Авторское свидетельство СССР № 132951, кл. G 03 В 37/02, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации скоростидВижЕНия изОбРАжЕНия | 1979 |
|
SU853599A1 |
| ПАНОРАМНЫЙ АЭРОФОТОАППАРАТ ПРЯМОГО СКАНИРОВАНИЯ | 1973 |
|
SU398820A1 |
| Панорамный фотоаппрат | 1978 |
|
SU769479A1 |
| Устройство для компенсации скорости движения изображения | 1980 |
|
SU890352A1 |
| МНОГОТРАКТОВЫЙ ЩЕЛЕВОЙ АЭРОФОТОАППАРАТ | 1992 |
|
RU2036499C1 |
| Способ устранения панорамных искажений при трансформировании аэрофотоснимков | 1983 |
|
SU1107620A1 |
| Способ трансформирования панорамных аэрофотоснимков | 1983 |
|
SU1107618A1 |
| ШИРОКОУГОЛЬНЫЙ ЩЕЛЕВОЙ АЭРОФОТОАППАРАТ | 1992 |
|
RU2036500C1 |
| Способ трансформирования выровненных в плоскость панорамных аэрофотоснимков | 1983 |
|
SU1107619A1 |
| Способ трансформирования выровненных в плоскость аэроснимков | 1973 |
|
SU454422A1 |
