те взаимодействия брони кабеля, бурового расвора и обсадных труб создаются гальванические элементы, ток которых изменяется вследствир нестабильного контакта брони кабеля с трубой. Воздействие помех на измерение потенциала SP сказывается еще более при исследовании морских скважин, так как трудно изолировать поверхностный электрод из-за высокой проводимости морской воды. Морская вода способствует образованию,гальванических элементов между различными металлами, ток которых также непостоянен во времени. Указанные причины делают результаты измерения потенциала SP малодостоверными.
Для устранения воздействия указанных помех предлагалось измерять дифференциал или градиент SP и интегрировать эту разность потенциалов. Однако шум постоянного тока или нестабильность усилителя приводит к значительным ошибкам.
Другой путь устранения влияния шумов, пр котором сравнивают потенциал электрода зонда с потенциалом брони кабеля, удаленной от поверхности земли и не подверженной во действию шума переменного тока, также не решает задачу защиты от шума. Любой участок брони кабеля имеет конечное удельное сопротивление и потенциал SP брони зависит от потенциала SP исследуемого пласта, вследствие чего возникают ошибки при измерениях.
Цель изобретения - повышение точности измерения потенциала SP путем исключения шумов высокой и низкой частоты.
Поставленная цель достигается тем, что в устройство, содержащее зонд с двумя разнесенными измерительными электродами, закреп1генный на кабеле, поверхностный электрод и измерительную аппаратуру, подключенную к кабелю и включающую в себя блок обработки данных, дополнительно вводят два (низкочастоны и высокочастотный) фильтра и суммирующую схему. Каждый измерительный электрод через один из этих фильтров подключен ко входу суммирующей схемы. Суммирующая схема соединена с измерительной аппаратурой.
Уст юйс1%о позволяет измерять потенциалы SP на каждом скважинном электроде и устранять шумы, осложняющие эти измерения.
Зонд, состоящий из двух подвижных либо фиксированных электродов, расположенных на скважинном приборе, обеспечивает измерение потенциалов SP каждого электрода и их градиента. Градиент потенциала затем интегриру-ется. Высокочастотные составляющие Р сигналов, измеренные между электродом зонда и броней кабеля, в сочетании с низкочастотными составляющими сигналов, измеренными между электродом зонда и поверхностным хчектродом, позволяет получить неискаженное
значение естественного потенциала SP в скважине.
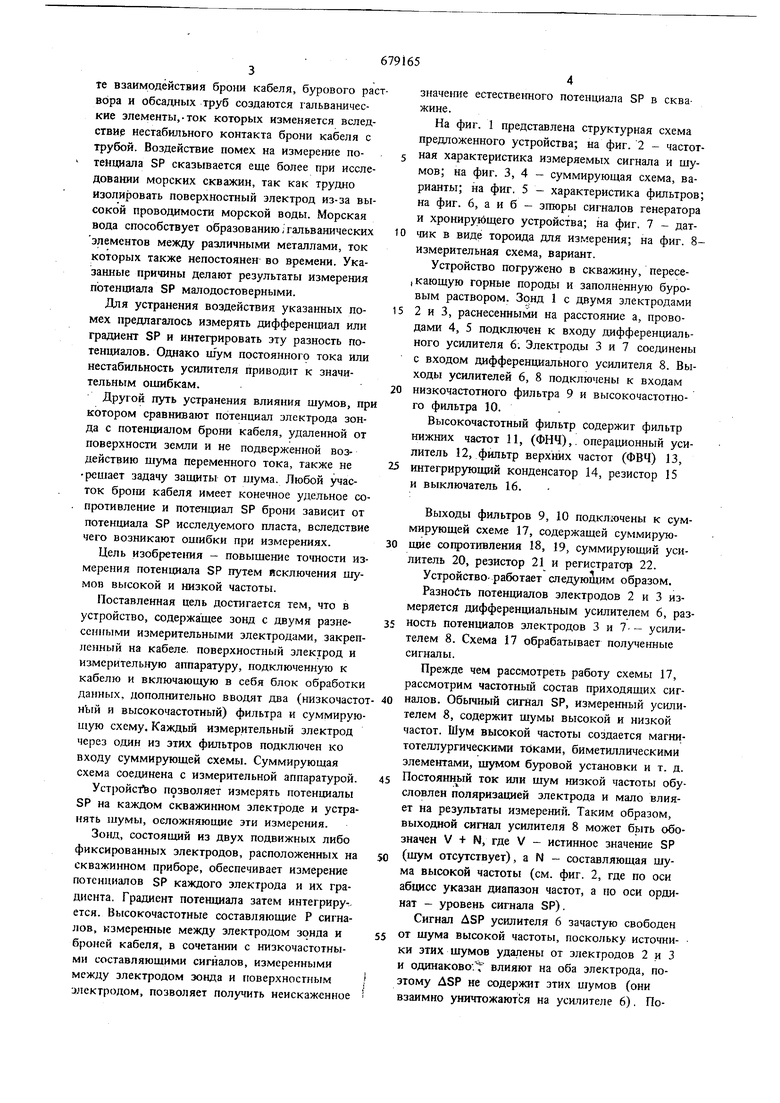
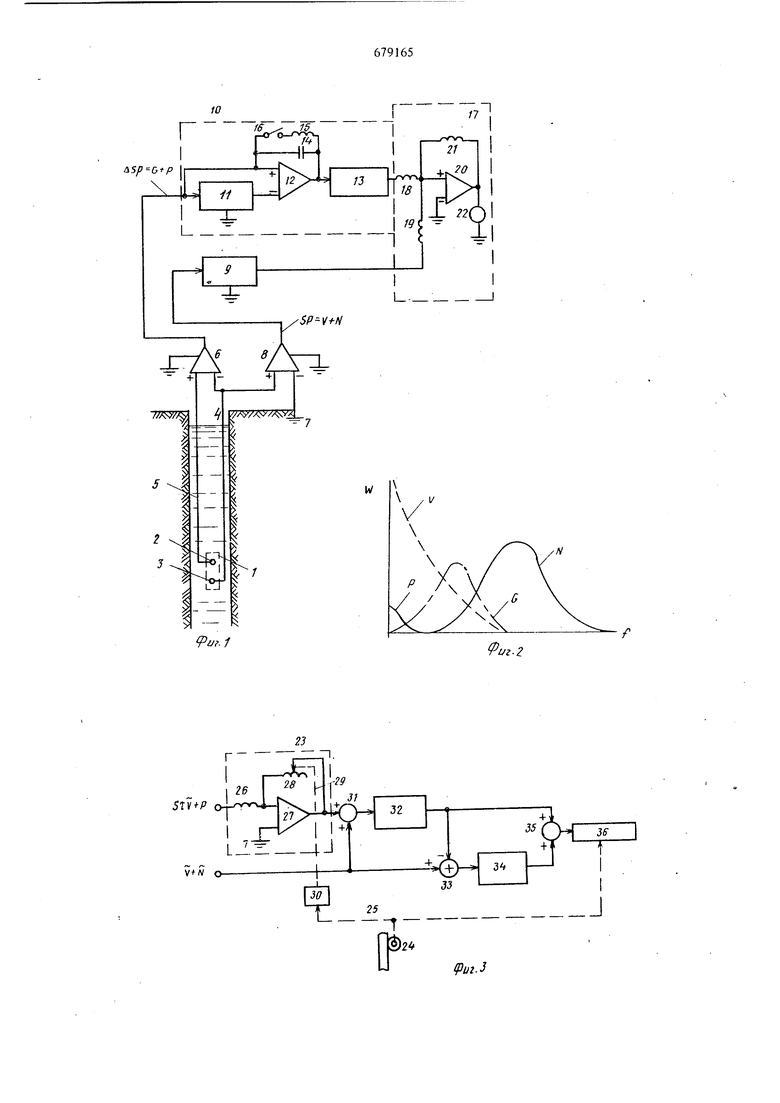
На фиг. 1 представлена структурная схема предложенного устройства; на фиг. 2 - частотная характеристика измеряемых сигнала и щумов; на фиг. 3, 4 - суммирующая схема, варианты; на фиг. 5 - характеристика фильтров; на фиг. 6, а и б - эпюры сигналов генератора и хронирующего устройства; на фиг. 7 - датчик в виде тороида для измерения; на фиг. 8измерительная схема, вариант.
Устройство погружено в скважину, пересе(Кающую горные породы и заполненную буровым раствором. Зонд 1 с двумя электродами
2 и 3, раснесенными на расстояние а, проводами 4, 5 подключен к входу дифференциального усилителя 6. Электроды 3 и 7 соединены с входом дифференциального усилителя 8. Выходы усилителей 6, 8 подключены к входам
низкочастотного фильтра 9 и высокочастотного фильтра 10.
Высокочастотный фильтр содержит фильтр нижних частот 11, (ФНЧ),. операционный усилитель 12, фильтр верхних частот (ФВЧ) 13,
интегрирующий конденсатор 14, резистор 15 и выключатель 16.
Выходы фильтров 9, 10 подключены к суммирующей схеме 17, содержащей суммирующие сопротивления 18, 19, суммирующий усилитель 20, резистор 21 и регистратор 22. Устройство, работает следующим образом. Разность потенциалов электродов 2 и 3 измеряется дифференциальным усилителем 6, разность потенциалов электродов 3 и 7 - усилителем 8. Схема 17 обрабатывает полученные сигналы.
Прежде чем рассмотреть работу схемы 17, рассмотрим частотный состав приходящих сигналов. Обычный сигнал SP, измеренный усилителем 8, содержит шумы высокой и низкой частот. Шум высокой частоты создается магнитотеллургическими токами, биметиллическими элементами, шумом буровой установки и т. д.
Постоянн ый ток или щум низкой частоты обусловлен поляризацией электрода и мало влияет на результаты измерений. Таким образом, выходной сигнал усилителя 8 может бь1ть обозначен V + N, где V - истинное значение SP
(шум отсутствует), а N - составляющая шума высокой частоты (см. фиг. 2, где по оси абцисс указан диапазон частот, а по оси ординат - уровень сигнала SP).
Сигнал ДВР усилителя 6 зачастую свободен
от шума высокой частоты, поскольку источни- ки этих шумов удалены от электродов 2 и 3 и одинаково . влияют на оба электрода, поэтому Д5Р не содержит этих шумов (они взаимно уничтожаются на уси-пителе 6). Поэтому выходной сигнал усилителя 6 (ДЗР, или градиент) содержит истинный сигнал градиек- i та, обозначенный через G, и шум поляризации, обозначенный через Р, т.е. Д8Р G + Р. Фиг, 2 иллюстрирует зависимость мощности W от частоты для составляющих измеряемого сигнала. Сигнал SP является суммой V + N, а сигнал Д5Р - суммой G+ Р, поэтому из сигнала усилителя 8 можно отфильтровать низкочастотную составляющую сигнала, а из сигнала усилителя 6 - высокочастотную составля1ощую сигнала SP.
Описываемое устройство позволяет измерить сигналы SP и ДЗР в схеме 17 и получить сигнал SP, в котором скомпенсировано влияние помех. Другими словами, составляющие N и Р сигналов отфильтровьгоаются от компонент V и G в цепи обработки сигнала.
Выходной сигнал градиента ДЗР на выходе усилителя 6 выражается следующим образом:
()-VfZbp o|| |(f;
где V(z)- истинное значение SP на глубине
Z в скважине; V()- истинное значение SP на глубине
Z + а в скважине.
В функции от времени уравнение (1) имеет вид:
5P a...|.p.(2)
где V §r скорость движения электродов. Записывая уравненне (2) через оператор Лапласа, имеем:
L((Z), СЗ)
1. («/) где f - параметр времени;
S - комплексное число. Тогда на выходе усилителя 8 имеем:
р у(г). (5)
где Vo - потенциал электрода 7. Обычно VQ равно нулю без учета составляющих щума N, и уравнение (5) записьтается следующим образом
, (6) Преобразование Лапласа для уравнения (6) дает
L(sP)--VCl -t- М .(7)
Для простоты вместо X(Z) будем писать V. Из фиг. 2 следует, что оба члена уравнения (7) отличаются но частоте. Поэтому выражение для выходного сигнала схемы 17 должно иметь следующий вид;
,)) (а) или
(9)
eo() ,
где L н Н - соответственно низко- и высокочастотные функции.
Усилитель 8 соединен с ФНЧ 9, имеющим переходную характеристику L уравнения (9). Низкочастотный сигнал через суммирующее сопротивление 19 подается на вход суммирующего усилителя 20, снабженного резистором 21 в цепи обратной связи.
Аналогично сигнал Д5Р усилителя 6 подается на вход операционного усилителя 12, снабженного ре:и1стором 15 в цепи обратной связи, т.е. сигнал Д5Р поступает в высокочастот Ный фильтр 10, переходная характеристика которого описывается функцией Н из уравнения (9). ФНЧ 11 имеет характеристику L и пропускает только низкочастотную часть сигнала Д5Р к вычитающему входу усилителя 12, к положительному входу которого подается сигнал ДЗР от усилителя 6. Усилитель 12 с конденсатором 14 образует интегратор, выход которого соединен с ФВЧ 13, имеющим переходную характеристику Н. Выходной сигнал ФВЧ .13 через усилитель 20 записывается регистратором 22.
Функции схемы 17 выражены уравнениями (8) и (9). Из уравнения (9) условие точного воспроизведения истинной части V сигнала SP выражается как:
L, $rH.CiO)
Переписывая уравнение (10) в ф нкции Н получим: j j-Lj i)
$t Для фильтра 10 переходная характеристика Н
выражается следующим образом:
Н С (12.)
Й1г
Из уравнения (12) видно, что если L| L и HI 1, то уравнение (12) аналогично уравнению (11), а функция Н фильтра 10 будет удолетворять уравнениям (10) и (11). Если , то ФВЧ 13 не нужен. Однако несовершенство интегратора, уход нуля усилителя 6 и т.д. приводят к тому, что в фильтре 10 практически нужен фильтр 13, который компенсирует лю-. бые помехи в фильтре 10. С другой стороны, интегратор не обеспечивает точного воспрон:5ведения составляющих сигнала постоянного тока из-за включения в фильтр 10 ФВЧ 13. Включение переменного резистора 15 параллелно конденсатору 14 с помощью выключателя 16 обеспечивает установку постоянной времени интегратора. Если допустить, что уравненне (10) не выполняется, то и в этом случае устройство обеспечивает измерение истинного сигнала V.
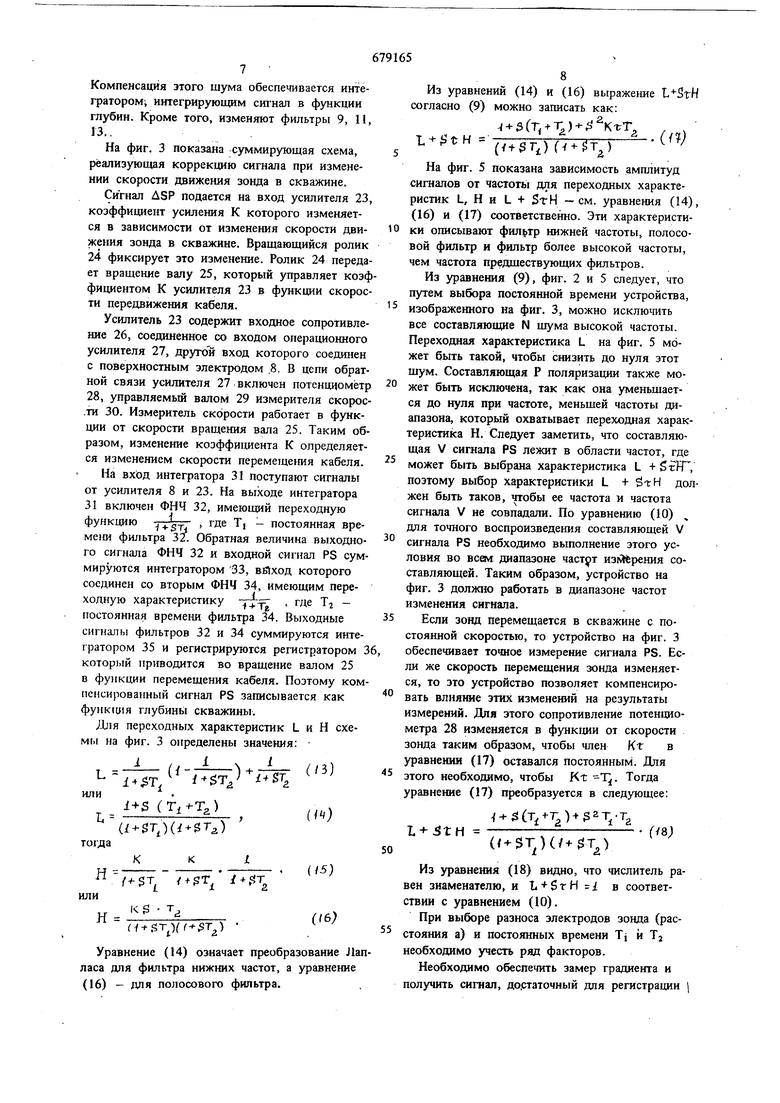
Схема 17 осуществляет измерения в функции временной, если зонд перемещается в скважине с постоянной скоростью. В случае нарушения этого условия регистрируемый сигнал осложняется шумом высокой частоты. Компенсация этого шума обеспечивается интегратором; интегрирующим сшнал в функции глубин. Кроме того, изменяют фильтры 9, 11, 13.. На фиг. 3 показана суммирующая схема, реализующая коррекцию сигнала при изменении скорости движения зонда в скважине. Сигнал Д5Р подается на вход усилителя 23 коэффициент усиления К которого изменяется в зависимости от изменения скорости движения зонда в скважине. Вращающийся ролик 24 фиксирует зто изменение. Ролик 24 переда ет вращение валу 25, который управляет козф фициентом К усилителя 23 в функции скорос ти передвижения кабеля. Усилитель 23 содержит входное сопротивление 26, соединенное со входом операционного усилителя 27, другой вход которого соединен с поверхностным электродом .8. В цепи обратной связи усилителя 27 включен потенциометр 28, управляемый валом 29 измерителя скорос .ти 30. Измеритель скорости работает в функции от скорости вращения вала 25. Таким образом, изменение козффшшента К определяется изменением скорости перемещения кабеля. На вход интегратора 31 поступают сигналы от усилителя 8 и 23. На выходе интегратора 31 включен ФНЧ 32, имеющий переходную функцию - 4- gTi 1 постоянная времени фильтра 32. Обратная величина выходного сигнала ФНЧ 32 и входной сигнал PS сум мируются интеграторам 33, вйход которого соединен со вторым ФНЧ 34, имеющим переходную характеристику Т+т постоянная времени фильтра 34. Выходные сигншты фильтров 32 и 34 суммируются интегратором 35 и регистрируются регистратором 3 который приводится во вращение валом 25 в функции перемещения кабеля. Поэтому ком пенсированный сигнал PS записывается как функ1Ц1я глубины скважины. переходных характеристик L и Н схемы на фиг. 3 определены значения: J. ,. L , L i-t-S () () /,-Зт /.т КЗ т .Tp() Уравнение (14) означает преобразование Лап ласа для фильтра нижних частот, а уравнение (16) - для полосового фильтра. Из уравнений (14) и (16) выраже1ше L+SrH согласно (9) можно записать как: + 3(T + T) (,г,)Г.тр На фиг. 5 показана зависимость амплитуд сигналов от частоты для переходных характеристик L, Н и L + ЗтН - см. уравнения (14), (16) и (17) соответственно. Эти характеристики описывают нижней частоты, полосовой фильтр и фильтр более высокой частоты, чем частота предществующих фильтров. Из уравнения (9), фиг. 2 и 5 следует, что путем выбора постоянной времени устройства, изображенного на фиг. 3, можно исклюгшть все составляющие N щума высокой частоты. Переходная характеристика L на фиг. 5 может быть такой, чтобы снизить до нуля этот щум. Составляющая Р поляризации также может быть исключена, так как она уменьшается до нуля при частоте, меньщей частоты диапазона, который охватывает переходная характеристика Н. Следует заметить, что составляющая V сигнала PS лежит в области частот, где может быть выбрана характеристика L + S-cFT, поэтому выбор характеристики L + etH должен быть таков, чтобы ее частота и частота сигнала V не совпадали. По уравнению (10) для точного воспроизведения составляющей V сигнала PS необходимо выполнение этого условия во всем диапазоне частот из1А6рения составляющей. Таким образом, устройство на фиг. 3 должно работать в диапазоне частот изменения сигнала. Если зонд перемещается в скважине с постоянной скоростью, то устройство на фиг. 3 обеспечивает точное измерение сигнала PS. Если же скорость перемещения зонда изменяется, то зто устройство позволяет компенсирювать влияние этих изменений на результаты измерений. Для этого сопротивление потенциометра 28 изменяется в функции от скорости зонда таким образом, чтобы член Кт в уравнении (17) оставался постоянным. Для этого необходимо, чтобы Kt -Т. Тогда уравнение (17) преобразуется в следующее: ,) L + .St Н -Г-f s; ()( Из уравнения (18) видно, что числитель равен знаменателю, и Т + гИ i в соответствии с уравнением (10). При выборе разноса электродов зонда (расстояния а) и постоянных времени Tj и Tj необходимо учесть ряд факторов. Необходимо обеспечить замер градиента и получить сигнал, достаточный для регистрации l
дифференциальнь м усилителем 6. Компромиссное решение достигается при а 0,3 t 0,6 ivf Для выбора Т, и Т2 (TI 72) необходимо обеспечить такое время, чтобы характеристика L достигла нуля до того, как сигнал N будет существенно влиять на результаты измерений. Величина времени должна быть такая, чтобы переходная характеристика Н была бы равна нулю при частотах, на которых составляющая Р сигнала PS существует. Кроме того, скорость перемещения электродов определяет выбор TI и Tj. Для скорости 0,3 м/с приемлемые результаты получают при постоянных времени от 5 до 40 мкс.
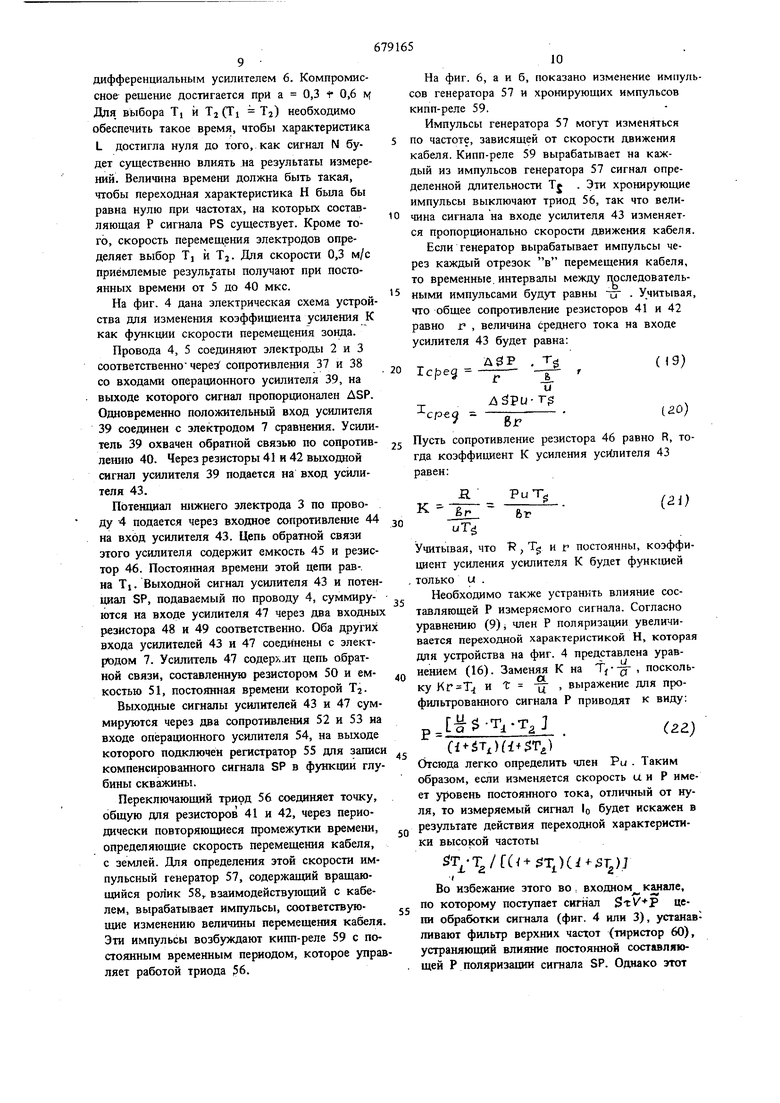
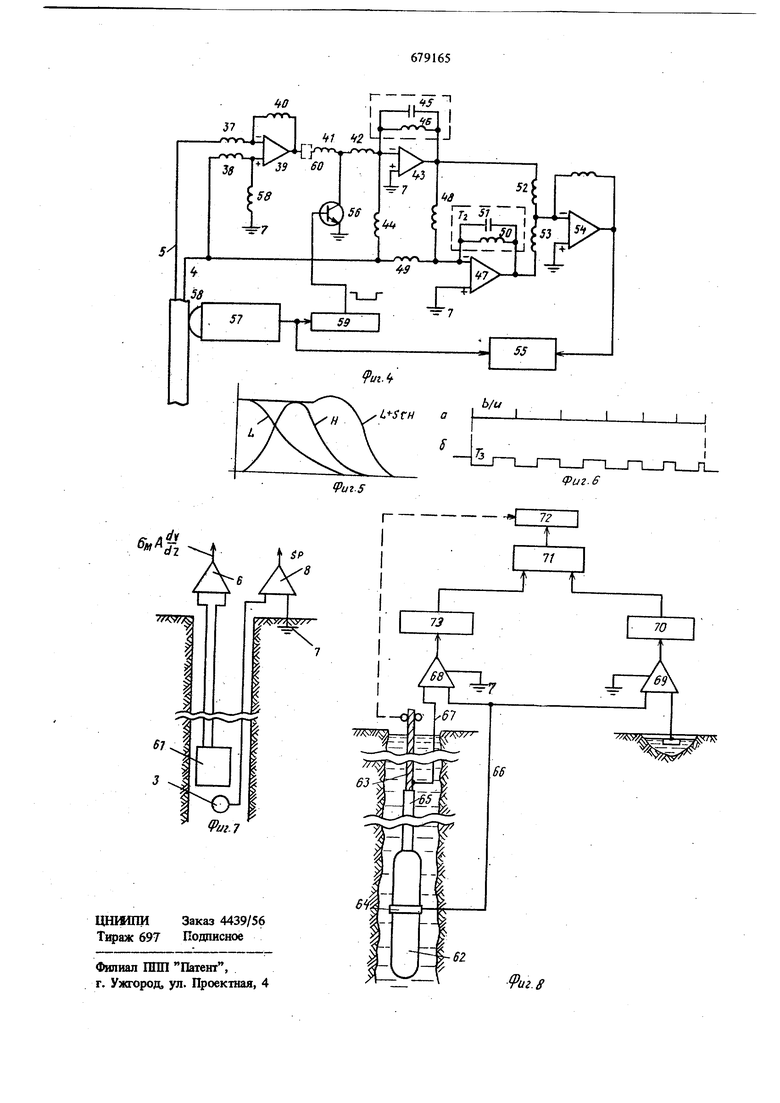
На фиг. 4 дана злектрическая схема устройства для изменения коэффиш1ента усиления К как функции скорости перемещения зонда.
Провода 4, 5 соединяют злектроды 2 и 3 соответственно 4epe3f сопротивления 37 и 38 со входами операционного усилителя 39, на выходе которого сигнал пропорционален ДЗР. Одновременно положительный вход усилителя 39 соединен с электродом 7 сравнения. Усилитель 39 охвачен обратной связью по сопротивлеиию 40. Через резисторы 41 и 42 выходной сигнал усилителя 39 подается на вход усилителя 43.
Потенциал нижнего электрода 3 по проводу -4 подается через входное сопротивление 44 на вход усилителя 43. Цепь обратной связи этого усилителя содержит емкость 45 и резистор 46. Постоянная времени этой цепи равна Tj. Выходной сигнал усилителя 43 и потенциал SP, подаваемый по проводу 4, суммируются на входе усилителя 47 через два входных резистора 48 и 49 соответственно. Оба других входа усилителей 43 и 47 соединены с электродом 7. Усилитель 47 содер.лт цепь обратной связи, составленную резистором 50 и емкостью 51, постоянная времени которой Тз.
Выходные сигналы усилителей 43 и 47 суммируются через два сопротивления 52 и 53 иа входе операционного усилителя 54, на выходе которого подключен регистратор 55 для записи компенсированного сигнала SP в функции глубины скважины.
Переключающий триод 56 соединяет точку, общую для резисторов 41 и 42, через периодически повторяющиеся промежутки времени, определяющие скорость перемещения кабеля, с землей. Для определения этой скорости импульсный генератор 57, содержащий вращающийся ролик 58,. взаимодействующий с кабелем, вырабатывает импульсы, соответствующие изменению величины перемещения кабеля Эти импульсы возбуждают кипп-реле 59 с постоянным временным периодом, которое управляет работой триода 6.
На фиг. 6, а и б, показано изменение импулсов генератора 57 и хронирующих импульсов кипп-реле 59.
Импульсы генератора 57 могут изменяться по частоте, зависящей от скорости движения кабеля. Кипп-реле 59 вырабатывает на каждый из импульсов генератора 57 сигнал определенной длительности Tj . Эти хронирующие импульсы выключают триод 56, так что величина сигнала на входе усилителя 43 изменяется пропорционально скорости движения кабеля.
Если генератор вырабатывает импульсы через каждый отрезок в перемещения кабеля, то временные, интервалы между последовательными импульсами будут равны -сг . Учитывая, что общее сопротивление резисторов 41 и 42 равно г , величина среднего тока на входе усилителя 43 будет равна:
Л
09)
ГА
Д5ри-г
(20)
-Ср€
6F
Пусть сопротивление резистора 46 равно R, тогда коэффициент К усиления ус1(лителя 43 равен:
РиТ
(2i) бг
Учитывая, что 7, Т иг постоянны, коэффициент усиления усилителя К будет функцией только U .
Необходимо также устранить влияние составляющей Р измеряемого сигнала. Согласно уравнению (9) -, член Р поляризации увеличивается переходной характеристикой Н, которая для устройства на фиг. 4 представлена уравнением (16). Заменяя К на , поскольKyKr Ti и ц выражение для профильтрованного сигнала Р приводят к виду:
$-T,
Р 1. d f- -± - -(22)
(,)
Отсюда легко определить член Ри . Таким образом, если изменяется скорость и и Р имеет уровень постоянного тока, отличный от нуля, то измеряемый сигнал 1о будет искажен в результате действия переходной характеристики высокой частоты
(+$T)( Во избежание этого во, входном канале,
f л
по которому поступает сигнал цепи обработки сигнала (фиг. 4 или 3), устанавливают фильтр верхних часцот (тиристор 60), устраняющий влияние постоянной составляющей Р поляризации сигнала SP. Однако этот
11
фильтр не нуя{ен, если скорость движения скважинного снаряда стабилизирована.
Бели переходная характеристика фильтра 60 равна -А jy ° коэффициент усиления К имеет следующее выражение:
(М.т.) (23). , с, 1
Введение фильтра 60 в устройство на фиг. 4 требует уточнения переходнь1х характеристик L и Н. Однако, если- Tj Tj, Tj, то принятые значения L и Н могут быть сохранены, при этом будет наблюдаться незначительное отклонение коэффициента усиления для , приведенное в уравнении (10).
Следует заметить, что измерение тока сигнала SP можно использовать для получения градиента сигнала в место-применения двух расположенных рядом электродов. Для этого случая ток сигнала SP равен:
5
(
/г , д
Р ТГ с/г
где .- удельная проводимость раствора в
скважине,
А - объем жидкости, проходящей через датчик, выполненный в виде торонда;
обычно постоянна, следовательно, результат измерения пропорционален -Д , т.е этот случай аналогичен использованию двух электродов.
На фиг. 7 показано применение датчика, выполненного в виде тороида для измерения SP.
Обычно SP измеряется электродами 3 и 7, включенными на вход усилителя 8. Градиент измеряется, например, индукционным датчиком 61, подключенным к усилителю 6.
Выходные сигналы усилителей 6 и 8 обрабатываются затем по описанной схеме измерения компенсированного сигнала SP.
Вместо градиента сигнала SP для измерения высокочастотного сигнала может применяться сигнал, измеренный обычным образом электродом 3 и броней кабеля.
Указанчую возможность иллюстрирует фиг.8.
Зонд 62, укрепленный на кабеле 63, содержит электрод 64. Нижняя часть кабеля покрыта изолирующим материалом 65. Провода 66 и 67 соединяют электрод 64 и броню кабеля 63 с измерительной схемой.
Усилитель 68 регистрирует разность потенциалов броии кабеля-и электрода 7 сравнения.
12
Усилитель 69 аналогично регистрирует сигнал сравнения скважинного и поверхностного электродов. Высокочастотный сигнал SP с брони кабеля выделяется ФВЧ 70. Устройство 71 интегрирует эти сигналы, после чего они регистрируются самописцем 72 в виде функции глу-, бины скважины.
Усилитель 69 содержит низкочастотную составляющую сигнала, но искажен шумом переменного тока. Наоборот, сигнал с выхода усилителя 68 содержит высокочастотную информацию SP, но искажен низкочастотным шумом. Выделяя ннзкочастотную составляющую из пер вого измерения (ФНЧ 73) и высокочастотную
(ФВЧ 70) - из второго, можно получить неискаженное значение сигнала SP.
Следует указать, что реализация устройства возможна в виде поверхностной или скважинной схемы.
Вместо вьщеления- частотных составляющих сигнала SP с помощью описанного устройства возможна регистрация указанных составляющих SP с целью последующей обработки информации вычислительными мащииами. В этом случае применение описанного устройства не рекомендуется.
Формула изобретения
« . Устройство для измерения естественных
потенциалов в скважине, содержащее зонд с двумя разнесенными измерительными электродами, закрепленный на кабеле, поверхностный электрод и измерительную электрическую цепь, подсоединенную посредством кабеля к электродам, и включающую в себя блок обработки данных, отличающееся тем, что, с целью повышения точности измерений путем исключения высокочастотных и низкочастотных помех, устройство обработки сигналов содержит низкочастотный фильтр, подсоединенный к первому электроду, высокочастотный фильтр, подсоединенный ко второму электроду, и суммирующую схему, входы которой подключены к выходам фильтров.
Источники информации, прииятые во внима-i иие при экспертизе
1.Патент США N 2973505, кл. 340-18, 28.02.1961.
2.Дахнов В. Н. Промысловая геофизика. Гостоптехиздат, 1959, с. 527-529.
I
I1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для индукционного каротажа | 1971 |
|
SU900823A3 |
| СПОСОБ РАБОТЫ УСТРОЙСТВА ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА СРЕДЫ МАГНИТОИНДУКЦИОННОГО РАСХОДОМЕРА (ВАРИАНТЫ) И МАГНИТОИНДУКЦИОННЫЙ РАСХОДОМЕР | 2009 |
|
RU2410646C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2146806C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2008 |
|
RU2361246C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2009 |
|
RU2382385C1 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ | 1983 |
|
SU1840214A1 |
| ЭЛЕКТРОННАЯ СХЕМА ВИХРЕВОГО РАСХОДОМЕРА | 1993 |
|
RU2148797C1 |
| СПОСОБ, СИСТЕМА И СКВАЖИННЫЙ ПРИБОР ДЛЯ ОЦЕНКИ ПРОНИЦАЕМОСТИ ПЛАСТА | 2007 |
|
RU2419819C2 |
| Способ обнаружения помпажа и вращающегося срыва компрессора | 2022 |
|
RU2789169C1 |
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
Uf.l
m.Z
30
