Изобретение относится к области навигационного приборостроения и может быть использовано как в обычных, так и в высокоширотных главных судовых магнитных компасах, оборудованных устройствами дистанционной передачи информации о курсе.
Известны дистанционные магнитные компасы (далее - МК), содержащие корпус, заполненный демпфирующей жидкостью, картушку с магнитным чувствительным элементом (далее - МЧЭ), установленную на опоре, индукционный преобразователь, размещенный в магнитном поле МЧЭ, девиационный прибор, содержащий компенсатор полукруговой девиации компаса, и электромеханическую дистанционную передачу, например, магнитные компасы "Сектор" [Кожухов В.П., Воронов В.В., Григорьев В.В. Магнитные компасы // М.: Транспорт, 1981, стр.173-180] и КМ145-С [Кардашинский-Брауде Л.А. Современные судовые магнитные компасы //СПб. ГНЦ РФ ЦНИИ "Электроприбор", 1999, стр.60-62].
К недостаткам способа измерения магнитного курса, реализуемого в этих МК относится то, что в условиях плавания судна появляется динамическая погрешность компаса, обусловленная, прежде всего, воздействием на картушку с МЧЭ центростремительного и тангенциального ускорения от воздействия качки [Рыбалтовский Н.Ю. Магнитно-компасное дело // Л.: Государственное издательство водного транспорта, 1954, стр. 441]. Появление этих ускорений обусловлено тем, что компас установлен на некотором плече относительно центра качания судна [Ривкин С.С. Определение линейных скоростей и ускорений качки корабля инерциальным методом. Часть I. Линейные скорости и ускорения качки корабля. ЦНИИ «Румб», 1980, стр.19]. Поскольку картушка МК имеет свойства короткопериодного маятника, она отклоняется от горизонтального положения под воздействием этих ускорений, что вызывает появление в плоскости диска картушки проекции вертикальной составляющей земного магнетизма, приводящее к динамической погрешности МК. Особенно велико значение динамической погрешности при плавании в высоких широтах, так как горизонтальная составляющая магнитного поля Земли там незначительна.
За прототип способа принято техническое решение, приведенное в [патент РФ №2763685], в котором с целью подавления динамической погрешности, возникающей при воздействии качки, применяется система коррекции, использующая микромеханический датчик угловой скорости (далее - ММГ) с вертикально расположенной осью чувствительности, установленный на котелке МК. При этом коррекция производится по угловой скорости и в её основе лежит дифференцирование показаний датчика магнитного курса (далее – ДМК) компаса и вычисление разности между сигналами с выхода дифференцирующего звена и ДМК. К недостатку прототипа относится то, что для реализации такой системы коррекции требуется достаточно сложный алгоритм устранения разрыва производной при дифференцировании сигналов ДМК в области перехода угла магнитного курса с 0° на угол 360°. Указанный алгоритм требует дополнительных вычислительных ресурсов и занимает значительный объём оперативной памяти вычислителя, что может привести к снижению точности выработки курса МК во время следования судна, в частности, курсом ноль градусов.
Решаемая техническая проблема - разработка способа измерения магнитного курса на качке без применения дифференцирования сигналов ДМК, но с применением в системе коррекции МК легкореализуемой задачи фильтрации, позволяющей получить значение угла курса с помощью комплексирования показаний ДМК и ММГ.
Достигаемый технический результат – повышение точности выработки курса МК при следовании судна любым курсом, в частности, курсом ноль градусов.
ММГ с вертикально расположенной осью чувствительности измеряет угловую скорость изменения курса, и, в силу присутствия низкочастотных составляющих дрейфа, может использоваться для выработки угла курса, только ограниченное время. В то же время требуемая точность выработки угла курса МК обеспечивается только в отсутствии качки и, соответственно, действия динамической погрешности.
С целью уменьшения динамической погрешности от качки судна предлагаемый способ измерения магнитного курса должен объединить показания ММГ и ДМК при помощи фильтра верхних частот (далее - ФВЧ) и фильтра нижних частот (далее - ФНЧ) таким образом, чтобы на выходе системы коррекции формировался угол курса, представляющий комбинацию низкочастотной и высокочастотной составляющих, соответственно, ДМК и ММГ. В этом случае в системе коррекции производится компенсация дрейфа нуля ММГ с помощью ФВЧ и динамической погрешности от качки судна в показании ДМК с помощью ФНЧ.
Предлагаемый способ основан на обеспечении условия инвариантности, при выполнении которого применяемые в системе коррекции ФВЧ и ФНЧ не оказывают влияния на полезный сигнал – вырабатываемый угол курса. Для обеспечения этого условия необходимо, чтобы сумма передаточных функций ФВЧ и ФНЧ всегда равнялась единице.
В простейшем случае в качестве ФВЧ и ФНЧ можно воспользоваться соответствующими динамическими звеньями с передаточными функциями  и
и  , где
, где  - постоянная времени ФВЧ,
- постоянная времени ФВЧ,  - постоянная времени ФНЧ, p =
- постоянная времени ФНЧ, p =  оператор дифференцирования. Равенство суммы передаточных функций ФВЧ и ФНЧ единице достигается при условии равенства постоянных времени ==
оператор дифференцирования. Равенство суммы передаточных функций ФВЧ и ФНЧ единице достигается при условии равенства постоянных времени == .
.
Для того, чтобы на выходе системы коррекции формировался угол курса по показаниям ДМК и ММГ, необходимо чтобы сигнал ММГ был вначале проинтегрирован, т.е. пропущен через звено  , и только потом к полученному выходному сигналу интегратора может быть применен ФВЧ -
, и только потом к полученному выходному сигналу интегратора может быть применен ФВЧ -  . Поскольку в результате такого последовательного соединения динамических звеньев
. Поскольку в результате такого последовательного соединения динамических звеньев  образуется передаточная функция -
образуется передаточная функция -  , то, выходной сигнал ММГ может быть пропущен через усилитель с коэффициентом усиления
, то, выходной сигнал ММГ может быть пропущен через усилитель с коэффициентом усиления  и далее подан, также как и выходной сигнал ДМК, пропущенный через усилитель с коэффициентом усиления
и далее подан, также как и выходной сигнал ДМК, пропущенный через усилитель с коэффициентом усиления  , непосредственно на вход ФНЧ:
, непосредственно на вход ФНЧ:  .
.
Таким образом, для выполнения условия инвариантности в систему коррекции вводятся два дополнительных усилителя: усилитель сигнала ДМК с коэффициентом усиления  и усилитель сигнала ММГ с коэффициентом усиления
и усилитель сигнала ММГ с коэффициентом усиления  . Сигналы с выходов усилителей далее поступают в вычислительное устройство, в котором производится выработка текущего значения угла курса.
. Сигналы с выходов усилителей далее поступают в вычислительное устройство, в котором производится выработка текущего значения угла курса.
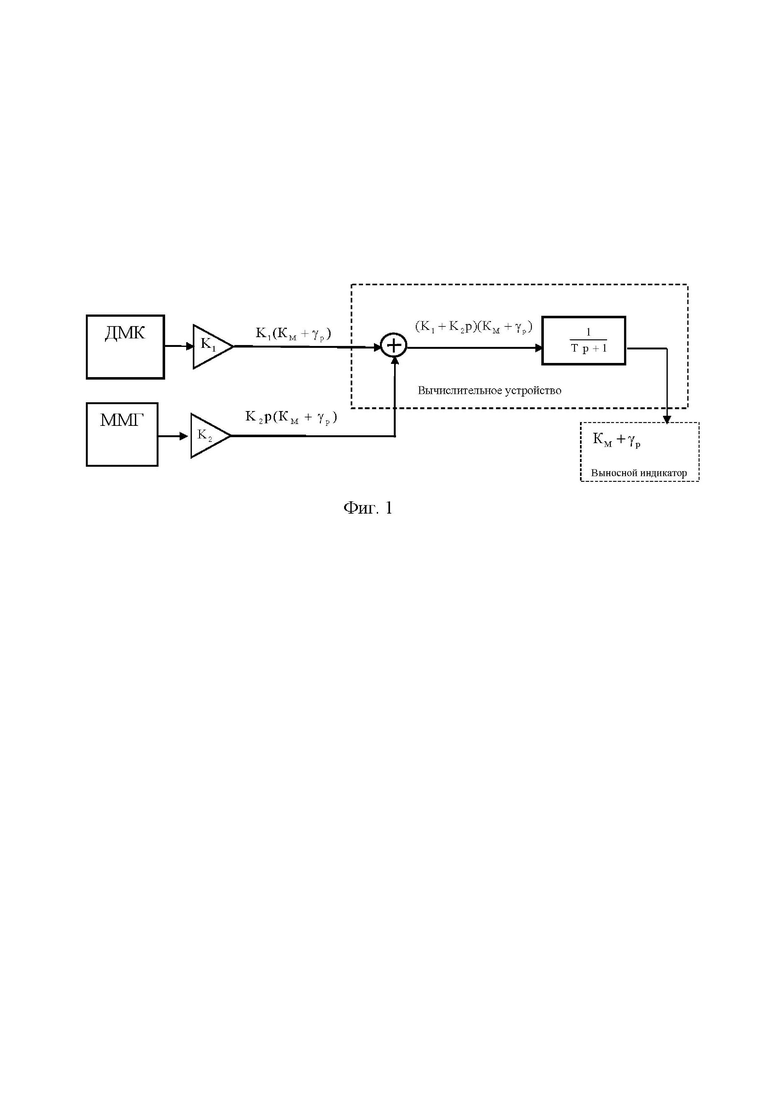
На фиг. 1 показана блок-схема реализация предлагаемого способа измерения магнитного курса. Предлагаемый способ заключается в следующем:
1. Выходной сигнал с ДМК поступает на усилитель с коэффициентом усиления , а выходной сигнал с ММГ на усилитель с коэффициентом усиления .
2. Сигнал с усилителя ДМК  суммируется с сигналом с усилителя ММГ -
суммируется с сигналом с усилителя ММГ -  ,
,
где - магнитный курс,
- магнитный курс,
 - угол рыскания.
- угол рыскания.
3. Полученная сумма сигналов подаётся на вход ФНЧ  с постоянной времени
с постоянной времени  , а на выходе ФНЧ формируется сигнал
, а на выходе ФНЧ формируется сигнал  , представляющий комбинацию низкочастотной и высокочастотной составляющих, соответственно, ДМК и ММГ, в котором отсутствует динамическая погрешность ДМК, возникающая при воздействии качки:
, представляющий комбинацию низкочастотной и высокочастотной составляющих, соответственно, ДМК и ММГ, в котором отсутствует динамическая погрешность ДМК, возникающая при воздействии качки: 
4. Сигнал подаётся на выносной индикатор.
Результаты работы МК с предлагаемой системой коррекции, в которой отсутствует дифференцирование сигналов ДМК как в прототипе, полученные на основе компьютерного моделирования, а также результаты натурных испытаний разработанного макета прибора подтверждают возможность подавления динамической погрешности ДМК при воздействии качки не менее чем в десять раз на интервале времени не менее 200 часов и, соответственно, повышение точности выработки курса, при следовании судна любым курсом, в том числе, курсом ноль градусов.
Таким образом, заявленный технический результат считается достигнутым.
1. Выходной сигнал с ДМК поступает на усилитель с коэффициентом усиления , а выходной сигнал с ММГ на усилитель с коэффициентом усиления .
2. Сигнал с усилителя ДМК суммируется с сигналом с усилителя ММГ - ,
где- магнитный курс,
- угол рыскания.
3. Полученная сумма сигналов подаётся на вход ФНЧ с постоянной времени , а на выходе ФНЧ формируется сигнал , представляющий комбинацию низкочастотной и высокочастотной составляющих, соответственно, ДМК и ММГ, в котором отсутствует динамическая погрешность ДМК, возникающая при воздействии качки:
4. Сигнал подаётся на выносной индикатор.
Результаты работы МК с предлагаемой системой коррекции, в которой отсутствует дифференцирование сигналов ДМК как в прототипе, полученные на основе компьютерного моделирования, а также результаты натурных испытаний разработанного макета прибора подтверждают возможность подавления динамической погрешности ДМК при воздействии качки не менее чем в десять раз на интервале времени не менее 200 часов и, соответственно, повышение точности выработки курса, при следовании судна любым курсом, в том числе, курсом ноль градусов.
Таким образом, заявленный технический результат считается достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции магнитного курса судна | 2024 |
|
RU2839828C1 |
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| Одноосный стенд для оценки амплитудно-частотной характеристики системы коррекции магнитного компаса | 2021 |
|
RU2757536C1 |
| Способ определения динамической погрешности магнитного компаса с системой коррекции от качки и устройство для его реализации | 2022 |
|
RU2783479C1 |
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2289786C1 |
Изобретение относится к области навигационного приборостроения и может быть использовано в судовых магнитных компасах (МК). Сущность предлагаемого способа измерения магнитного курса судна на качке заключается в объединении выходных сигналов микромеханического гироскопа (ММГ) и датчика магнитного курса (ДМК) при помощи фильтров верхних частот (ФВЧ) и нижних частот (ФНЧ). При этом на выходе системы коррекции формируется угол курса, представляющий собой комбинацию низкочастотной и высокочастотной составляющих, соответственно, ДМК и ММГ. Кроме того, при реализации заявленного способа обеспечивается выполнение условия инвариантности, при котором сумма передаточных функций ФВЧ и ФНЧ равняется единице – с этой целью в систему коррекции вводятся два дополнительных усилителя: усилитель сигнала ДМК с коэффициентом усиления К1=1, а также усилитель сигнала ММГ с коэффициентом усиления К2=Т, равным постоянной времени ФНЧ. Техническим результатом, достигаемым при осуществлении заявленного изобретения, является повышение точности выработки курса МК при следовании судна любым курсом. 1 ил.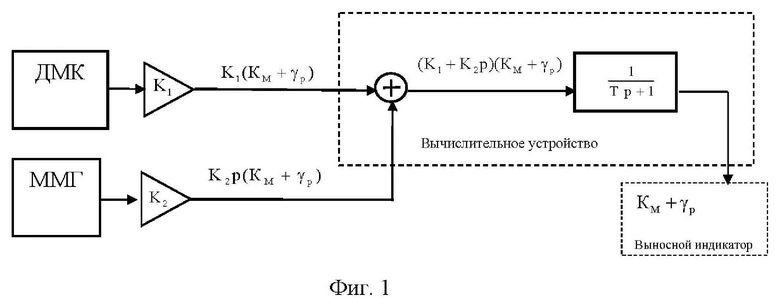
Способ измерения магнитного курса судна на качке при воздействии на магниточувствительный элемент картушки компаса вертикальной составляющей магнитного поля Земли, заключающийся в использовании сигналов датчика магнитного курса (ДМК) и микромеханического гироскопа (ММГ) с вертикальной осью чувствительности, установленного на котелке магнитного компаса, отличающийся тем, что в систему коррекции введены дополнительные усилители сигналов ДМК и ММГ с соответствующими коэффициентами усиления  и
и  , отношение которых
, отношение которых  соблюдается равным постоянной времени Т фильтра нижних частот
соблюдается равным постоянной времени Т фильтра нижних частот  , через который пропускается сумма сигналов с выходов усилителей этих датчиков для вычисления угла курса на основе комбинации низкочастотной и высокочастотной составляющих соответственно сигналов ДМК и ММГ.
, через который пропускается сумма сигналов с выходов усилителей этих датчиков для вычисления угла курса на основе комбинации низкочастотной и высокочастотной составляющих соответственно сигналов ДМК и ММГ.
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| CN 110530350 A, 03.12.2019 | |||
| WO 2004076971 A2, 10.09.2004. | |||
