Изобретение относится к телемеха нике/ а именно к устройствам, осуще ствляющим телеуправление положением затворов, перегораживающих гидротехнических сооружений, и может быт использовано в системе автоматического телеуправления подъемными механизмами, как однозатворных так и многозатворных, перегораживающих гидротехнических: сооружений. Известные устройства, позволяющи осуществлять телеуправление положением затворов, перегораживающих гид ротехнических сооружений, которые содержат телеуправление следящие электроприводы затворов, задатчик, блок отработки задания/ блок управления электроприводом/ датчик положения затвора, линии связи l . Основными недостатками извесФных решений является необходимость имет для каждого затвора обратный информационный канал/ включающий в себя значительный объем каналообразующей аппаратуры (счетчики импульсов, эле менты сравнения, генераторы импульсов и др. блоки)/ который обеспечивает передачу информации о состоянии (положении) затвора в аппаратуру телемеханики. Это существенно уменьшает надежность работы устройства и увеличивает его стоимость. Я.аиболее близким по технической сущности к предложенному является устройство для телеуправления гидротехническими объектами, содержащее на диспетчерском пункте блок телеуправления и телесигнализации, соединенный через линию связи с блоком телеуправления и телесигнализации исполнительного пункта, на каждом объекте управления блок управления, выход которого подключен ко входу электропривода, первый выход которого соединен со входом датчика синхронизации, а второй выход подключен ко входу затвора объекта управления, выход затвора первого объекта управления соединен со входом датчика положения затвора 2 . Недостатком известного устройства является низкая надежность. Целью изобретения является повышение надежности устройства. Поставленная цель достигается тем/ что в устройство введен на исполнительном пункте блок выравнивания положения затворов/ первый вход и первый выход которого соединены соответственно с выходом и входом
блока телеуправления и телесигнализации исполнительного пункта, вторые ;выходы блока выравнивания положения 1 затворов подключены ко входам блоков управления объектов управления, на каждом из которых выходы датчиков синхронизации и датчика положения затвора соединены соответственно со вторыми входами и с третьими входами блока выравнивания положения затворов исполнительного пункта который содержит, элемент И, элемент запрета, формирователь сигналов и элемент сравнения, первый и второй выходы которого подключены соответственно к первому входу элемента И и через формирователь сигналов к первому входу элемента запрета выходы которого соединены со вторыми выходами блока выравнивания положения затворов, первый вход каждого подключен ко второму входу элемента запрета, вторые входы - ко входам элемента сравнения, третий вход блока выравнивания положения затворов соединен со вторым входом элемента И, выход которого соединен с первым выходом блока выравнивания положения затворов.
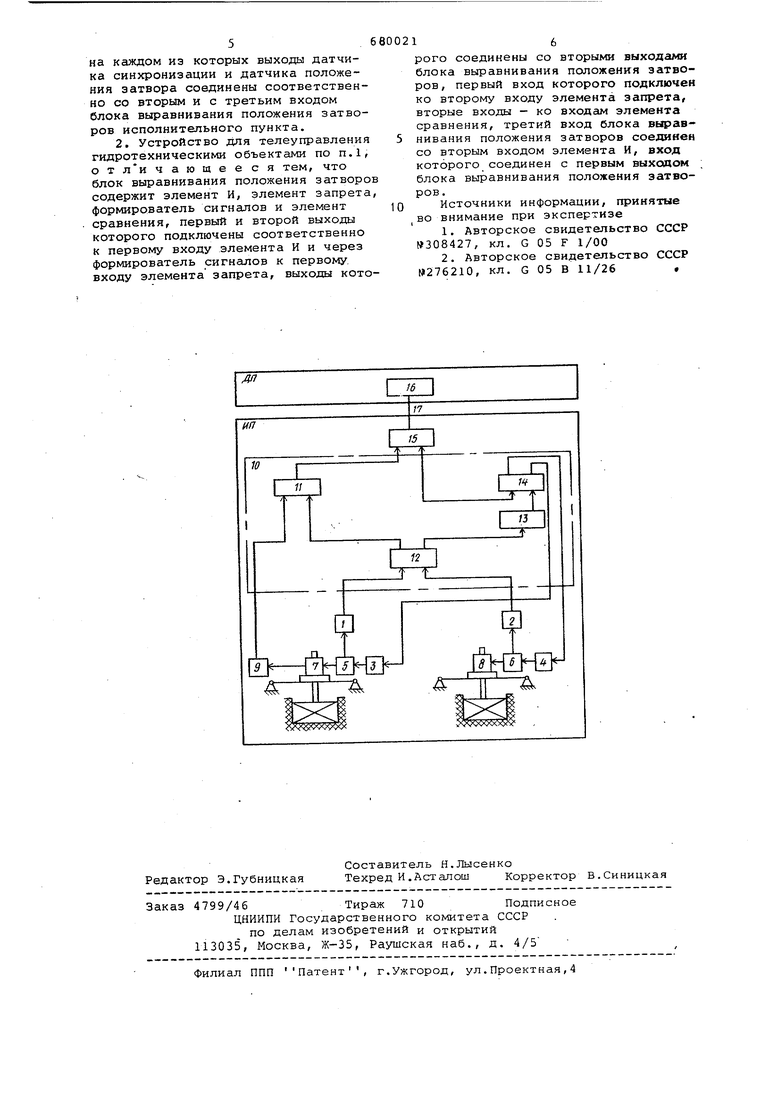
Устройство содержит датчики синхронизации 1,2, блоки управления 3,4, электроприводы 5,6, затворы 7,8, датчик положения затворов 9, блок 10 выравнивания положения затворов (состоящий из элемента И 11, элемента сравнения 12, формирователя управляющих сигналов 13 и элемента, запрета 14, блок 15 телеуправления и телесигнализации исполнительного пункта, блок 16 телеуправления и телесигнализации диспетчерского пункта, линию связи 17.
Работает устройство следующим образом.
При подъеме или опускании затворов перегораживающих сооружений , 8 от датчиков синхронизации 1,2 на входы блока выравнивания положения Затворов 10 (на входы элемента сравнения 12 поступают сигналы, характеризующие движение затворов (относительно друг друга) перегораживающих сооружений 7,8 -(например, импульсы выдаются через каждый сантиметр движения) Элемент сравнения 12: сравнивает сигналы от датчиков синхронизации 1,2 и при их рассогласовании на величину, превышающую, заданную, вырабатывает .сигнал,, поступающий в формирователь управляющих сигналов 13, последний вырабатывает сигнал на останов затвора, находящегося впереди по ходу движения, который поступает на один из
входов элемента запрета 14, На второй вход элемента запрета 14 поступают управляющие сигналы от блока 16 диспетчерского пункта {ДО) через линию связи 17 и блок 15 исполнительного пункта (ИП) с заданном режиме работы электроприводов.
Схема запрета 1,4 выдает сигнгш в блок управления (3 или 4) электропривода (5 или б) затворов (7 или 8) 5 перегораживающего сооружения, при этом осуществляется останов затвора находящегося впереди по ходу движения.
После того как положение затворов сравняется,запрет снимается и их движение продолжается.
При поступлении сигнала из блока 15,16 на останов электроприводов (5 или 6) затворов (7 или 8) формиg рователь управляющих сигналов 13 выдает сигнал на элемент запрета 14, который вырабатывает сигнал, относящийся к тому затвору, который отста. ет по ходу движения, и независимо от наличия или отсутствия сигнала о рассогласовании движения последнего продолжается до тех пор, пока его положение не сравняется со вторым затвором.
При равенстве положения затворов 5 с датчика положения затворов 9 (который совместно с элементом И 11 составляет обратный информационный канал) и с элемента сравнения 12 поступают сигналы в элемент И 11 на 0 :разрешение прохождения сигнала о положении затворов перегораживающе.;ГО сооружения в аппаратуру телемеханики 15 и 16. д
Таким образом, предложенное устройство обладает большой надежностью работы.
Формула изобретения
1 о Устройство для телеуправления гидротехническими объектами, содержащее на диспетчерском пункте блок телеуправления и телесигнализации, соединенный через линию связи с блоком телеуправления и телесигнализации исполнительного пункта на каждом объекте управления блока управления, выход которого подключен ко входу электропривода, первый выход кото,рого соединен со входом датчика
синхронизации, второй выход подключен ко входу затвора объекта управления, выход затвора первого объекта управления соединен со входом
5 датчика положения затвора, отличающееся тем, что, с целью повышения надежности устройства в него введен на исполнительном пункте блок выравнивания положения заQ творов, первый Ёход и первый выход которого соединены соответственно с выходом и входом блока телеуправления и телесигнализации, вторые выходы блока выравнивания положения
5 затворов подключены ко входам блоков управления объектов управления,
56
на каждом из которых выходы датчика синхронизации и датчика положения затвора соединены соответственно со вторым и с третьим входом блока выравнивания положения затворов исполнительного пункта.
2. Устройство для телеуправления гидротехническими объектами по п.1, отличающее ся тем, что блок выравнивания положения затворов содержит элемент И, элемент запрета, формирователь сигнешов и элемент сравнения, первый и второй выходы которого подключены соответственно к первому входу элемента И и через формирователь сигналов к первому, входу элемента запрета, выходы которого соединены со вторыми выходами блока выравнивания положения затворов, первый вход которого подключен ко второму входу элемента запрета, вторые входы - ко входам элемента сравнения, третий вход блока ВЕфавнивания положения затворов соединен со вторым входом элемента И, вход которого соединен с первым выходом блока выравнивания положения затворов .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №308427, кл. G 05 F 1/00
2.Авторское свидетельство СССР №276210, кл. G 05 В 11/26 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для телеуправления гидротехническими объектами | 1981 |
|
SU974391A1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Система автоматического регулирования расходов воды (его варианты) | 1981 |
|
SU1043605A1 |
| Способ для циклического опроса рассредоточенных объектов | 1974 |
|
SU519753A1 |
| Система телемеханики для циклического опроса рассредоточенных объектов | 1977 |
|
SU691912A1 |
| Устройство для формирования команд телеуправления и телесигнализации | 1975 |
|
SU554551A1 |
| Устройство для телеуправления и телесигнализации | 1981 |
|
SU1023381A1 |
| Система телеуправления и телесигнализации | 1985 |
|
SU1332356A1 |
| Система телемеханики | 1977 |
|
SU690530A1 |
| ВСЕСОЮЗНАЯ Л. А. Шойхет, А. С. Белима, А. Г. Мелик-Аскаров, }j^,..^,..,.. ^^^,,,,.,.^^В. М. Гаврилюк, Б. И. Семеняк и А. А. Казьмина р^"—"!Н1'~1':ХН'''-;5\?{ЛЯ | 1970 |
|
SU287550A1 |
13
