1
Изобретение относится к вентильной преобразовательной технике и может быть использовано для управления вентильным преобразователем частоты со слежением по току (или по напряжению) при работе на двит атель переменного тока.
Известны способы слежения за током нагрузки (или напряжением) в вентильных преобразователях, которые применяются как в собственно частотно-токовых системах, в которых основным заданием является задание на ток fl, так и в системах подчиненного регулирования, в которых контур регулирования по току является вспомогательным 2. Эти способы основаны на выработке импульсов управления в моменты равенства опорного сигнала и сигнала с выхода пропорционального или пропорционально-интегрального регулятора тока, на вход которого подают сигнал пропорциональный разности тока управления и тока нагрузки.
Известные способы слежения в вентильных преобразователях частоты не обеспечивают достаточную точность.
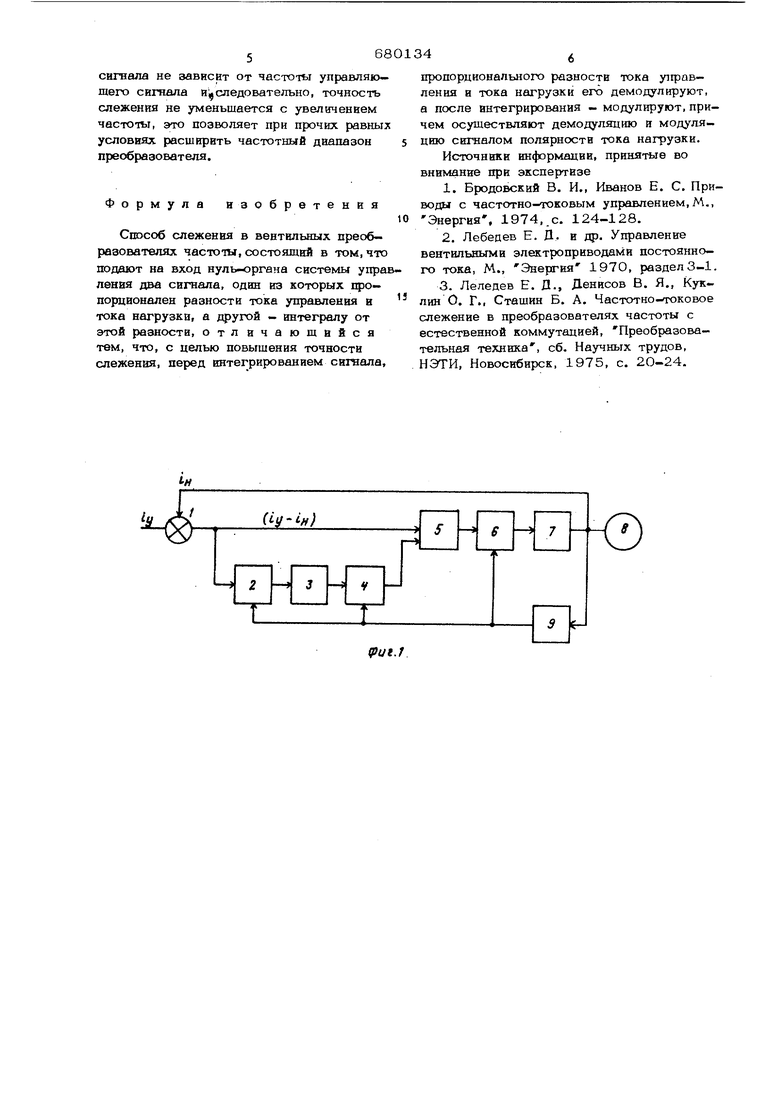
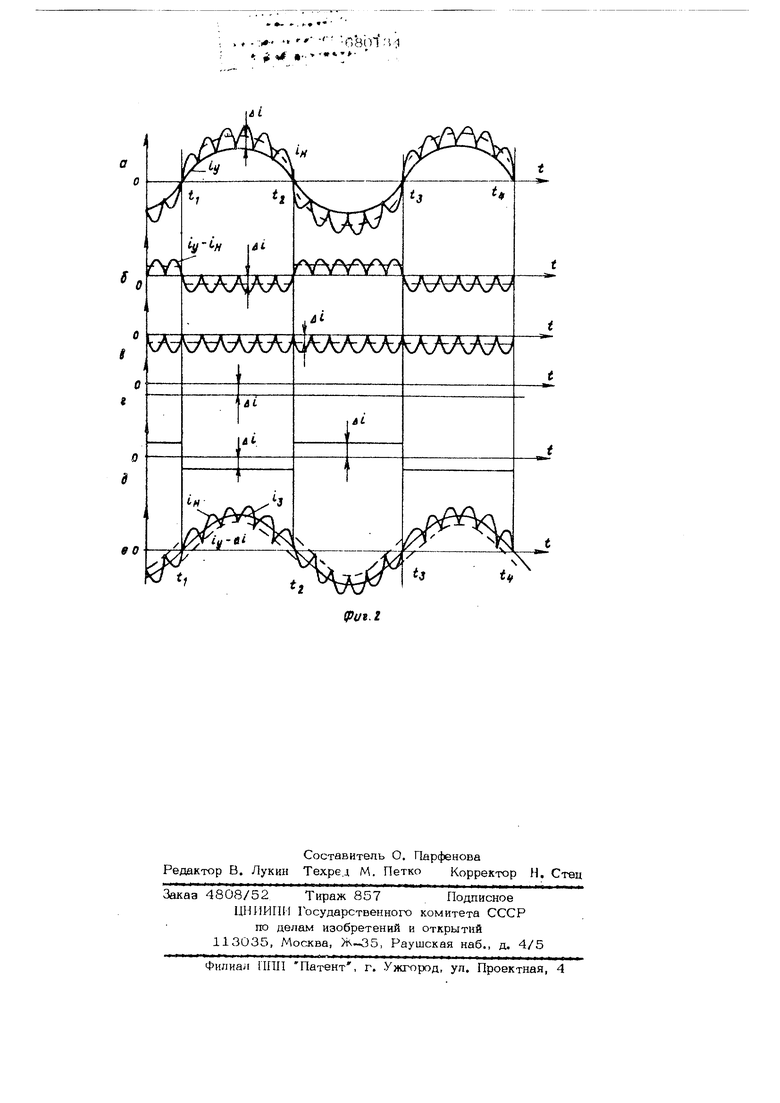
Известен способ слежения в вентильных преобразователях частоты, при котором на вход нуль-органа системы управления подают два сигнала, один из которых пропорционален разности тока управления и тока нагрузки, а другой - интегралу От этой разности З, что является наиболее близким к описываемому изобретению по технической суииюсти и достигаемому результату. Однако, для обеспечения устойчивой работы преобразователя, пульсации сигнала пропорционального интегралу от разности входного и выходного тока должны быть меньше, чем пульсации первого сигнала, пропорционального разности входного и выходного тока. Это означает, что постоянная времени ин- тегрируюшей цепи выбрфается сравнительно большой. Поэтому в преобразователях частоты на средних и iibici KHX частотах сказывается инерционность шгтегрируюше- ГО звена, и точность слежения ухудшается. Целью данного изобретения является повышение точности слежения. Эта цель достигается тем, что в способе сленсения в вентильных преобразователях частоты, состоящем в том, что подают на вход нуль органа системы управления два сигнала, один из которых пропорционален разности тока управления и тока нагрузки, а другой - интегралу от этой разности, перед интегрированием сиг нала, пропорционального разности тока управления и тока нагрузки, его демодулируют, а после интегрирования модулируют причем осуществляют демодуляцию и моду ляцию сигналом полярности тока н 1грузки Устройство, реализующее описываемый способ приведено на фиг. 1, а эпю1ы токов и напряжений - на фиг. 2. Устройство, реализующее описываемый способ (фиг. 1) состоит из сумматора 1 демодулятора 2, интегратора 3, модулятора 4, нуль-органа 5, распределителя 6, силовой части ви1тильного преобразователя частоты 7, асинхронного двигателя 8, устройства раздельного управления 9. Вен тильный пробразователь частоты состоит из двух вентильных комплектов, каждый из которых пропускает ток только в одном направлении. Описываемый способ можно уяснить рассмотрев работу следящей по току системы управления (фиг. 1). На вход сумматора 1 подают два сигнала, один из которых проиорционален заданному току, а другой - току нагрузки. Разность этих сигналов подают на демодулятор 2, с выхода которого демодулированный сигнал поступает на вход интегратора 3, а затем - на модулятор 4. На нуль-орган 5 подают сигнал с выхода сумматора 1 и с выхода модулятора 4. Импульс управ- ЛШ1ИЯ, вырабатываемый нуль-органом 5, хюдают через распределитель 6 на соответствующий тиристор вентильного преобразователя частоты 7, питающий двигател 8, Напряжение управления на демодулятор 2, модулятор 4 и распределитель 6 подают с выхода устройства раздельного упрваленвя . 9, на вход которого подают сигнал, пропорциональный току нагрузки. Через распределитель 6 устройство раздельного уаравления 9 производвгг переключе- НН8 вентильных комплектов преобразовате ля 7 дрн смене полярности тока нагрузки Рассмотрим влияние демодулятора 2 и модулятора 4 на форму корректирующеГО сигнала, который поступает с выходя модулятора 4 на вход нуль-органа 5. Предположим, что на вход нуль-органа поступает только один сигнал пропорциональный разности входного в выходного сигналов. Это означает, что осуществляется слежение за мгновенным значением тока, при котором импульс управления вырабатывается в момент равенства тока нагрузки заданному току (фиг. 2а). Ошибка слежения по гладкой составляющей -IH (фиг. 2а, б) обусловлена пульсациями тока нагрузки. Оневидно, что для уменьшения ошибки слежения необходимо вести слежение не за сигналом INJ , а за сигналом - Л1 (фиг. 2а).При этом корректирующий сигнал должен иметь прямоугольную форму, как и гладкая составлг.юшая ошибки слежения (фиг. 26). Согласно блок-схеме (фиг. 1) разность заданного тока и тока нагрузки поступает на вход демодулятора 2, управляемого устройством раздельного управления 9. Демодулятор осуществляет операцию умножения на +1 или на -1 в зависимости от полярности тока нагрузки. В данном случае он без изменений пропускает сигнал на интервале работы одного вентильного комплекта t 4-tg и -t -r-fcA (фиг.2в) и изменяет знак сигнала на интервале работы другого вентильного комплекта ((i)Hr. 2в). Демодулированный сигнал пропускают интегратор 3, в качестве которого может быть использован фильтр, выделяющий гладкую составляющую (фиг. 2г). Профильтрованный сигнал затем подают на модулятор 4 (фиг. 1), управляемый устройством раздельного управления 9. Демодулятор изменяет знак отфильтрованного сигнала на интервале проводимости второго вентильного комплекта -feg -г . (фиг. 2д). В результате сигнал с выхода демодулятора имеет прямоугольную форму, т.е. полностью совпадает по форме и по фазе с гладкой составляющей ошибки А1 (фиг. 2б, д). Если напряжение с выхода демодулятора подать на нуль-орган (фиг. 1,), то изменится уровень срабатьтания нуль-органа. Кривая тока нагрузки сместится вниз на интервале t-i -ттЬг и вверх на интервале -fcg 4 Ч, (фиг. 2е). В результате ошибка слежения на гладкой составляющей тока уменьшается, а точность слежения повысится. . В предложенном способе в отличие of прототипа, амплитуда корректирующего сигнала не зависит от частотьт управляющего сигнала и; следовательно, точность слежения не уменьшается с увеличением частоты, это позволяет при прочих равны условиях расширить частотный диапазон преобразователя. Формула изобретения Способ слежения в вентильных преобразователях частоты, состоящий в том, чт подают на вход нyльiopгaнa системы упр ления два сигнала, один из которых пропорционален разности тока управления в тока нагрузки, а другой - интегралу от этой разности, отл ичаюшийся тем, что, с целью повышения точности слежения, перед интегрированием сигнала пропорционального разности тока утфавления и тока нагрузки его демодулируют, а после интегрирования - модулируют, причем осуществляют демодуляцию и модуляцию сигаалом полярности тока нагрузки. Источники информации, принятые во внимание при экспертизе 1.Бродовский В. И., Иванов Е. С. Приводы с частотно-токовым управлением, М., Энергия, 1974,.с. 124-128. 2.Лебедев Е. Д. и др. Управление вентильными электроприводами постоянного тока, М., Энергия 1970, раздел3-1. 3.Леледев Е. Д., Денисов В. Я., КукЛИН О. Г., Стащин Б. А. Частотно гоковое слежение в преобразователях частоты с естественной коммутацией, Преобразовательная техника , сб. Научных трудов, НЭТИ, Новосибирск, 1975, с. 20-24.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для одноканального фазового управления вентильным преобразователем | 1977 |
|
SU660188A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| Способ слежения за выходным током вентильного преобразователя | 1975 |
|
SU540338A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ т-ФАЗНЫМ НЕПОСРЕДСТВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 1973 |
|
SU381145A1 |
| Способ управления вентильным преобразователем | 1975 |
|
SU570971A1 |
| Способ управления вентильным преобразователем с непосредственной связью и естественной коммутацией | 1980 |
|
SU1117817A1 |
| Устройство для управления @ -фазным реверсивным вентильным преобразователем | 1989 |
|
SU1837378A1 |
| Способ раздельного управления непосредственным преобразователем частоты | 1974 |
|
SU682988A1 |
| Способ управления вентильным преобразователем со слежением | 1974 |
|
SU725188A1 |
| ПОЛНОСТЬЮ КОМПЕНСИРОВАННЫЙ ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1996 |
|
RU2117377C1 |
G Л ЛЛЛ/oMcATV
во
WVWVAA
К
t
