1
Изобретение относится к системам автоматического управления, а именно к электроприводам с цифровым управлением.
Известны цифровые систе№Л управления электроприводом 1.
Однако эти системы обладают бо)1ьшой сложностью.
Известен также репейный электропривод, содеряса11р1й усилитель, знаковое устройство,соединенное с первым входом усилителя, релейные коммутирующие элементы и три группы последовательно соединенных резисторов, первая из которых установлена в цепи обратной связи усилителя, второй и третий входы которого через вторую и третью группы- резисторов соединены соответственно с общей точкой диодов и элементом обратной связи, параллельно одному из резисторов каждой группы подключены соответствующие нормально разомкнутые контакты знакового устройства; параллельно каждому из резисторов в каждой группе подключены нормально разомкнутые контакты соответствующего репейного элемента 2,
Недостатком известного привода является его сложность, заключающаяся в необходимости применения операционного усилителя и нескольких источников питания.
Для упрощения цифрового привода первая группа резисторов одним концом подключена к первому выходу блока знака и к общей точке двух
0 встречно включенных диодов, один из которых п.одключен к первому входу первого усилителя, второй - к первому входу второго усилителя, а вторым концом первая группа резис5торов подключена к первому выводу второй группы резисторов, к средней точке потенциометра обратной связи .и ко вторым йходам усилителей, второй вывод второй группы резисторов
0 подключен через добавочный резистор ко второму выходу, блока знака, ;движок потенциометра рбратной связи подключен к общей точке двух других встречно вк.шоченных диодов, пер5вый из которых подключен к третьему входу первого усилителя, а второй - к третьему входу второго усилителя.
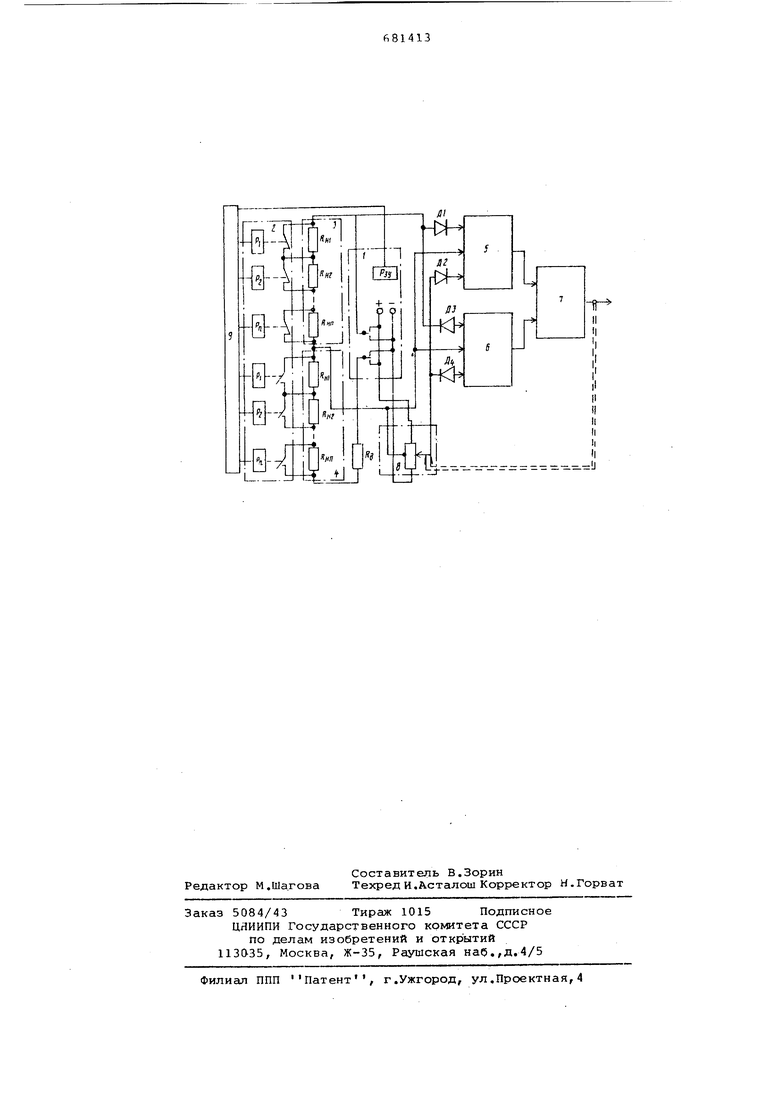
На чертеже дана схема предпагаеQ мого цифрового привода..
Он содержит блок 1 знака, репейный блок 2,, первую группу резисторов 3, вторую группу резисторов 4, первый усилитель 5,- второй усилитель 6, силовой механизм 7, потенциометр 8 обратной связи, блок 9 управления (ЦВМ), добавочный резистор Rg и ДИОЛЬ D - 4
Отношения величин сопротивлений в группах резисторов равны 1:2:4:8. Число резисторов в каждой группе равно числу разрядов управляющей вычислительной машины.
Электропривод работает следующим образом.
В исходном состоянии все резисторы группы 3 зашунтированы нормально замкнутыми контактами релейного блока 2, а все контакты на второй группе резисторов 4 разомкнуты.
При срабатывании блока 1 знака группы резисторов 3 и 4 подключаются к источнику питания. Если напряжение на группе резисторов 3 равно нулю,, сигнал на первых входах усилителей 5 и 6 также равен нулю. Б этом случае все напряжение источника питания прикладывается к группе резисторов 4.
При подаче на привод сигнала управления в виде, например, цифры (fj) срабатывает реле Р1, размыкает свои нормально замкнутые контакты на резисторе R группы 3 и замлкает свои нормально разомкнутые контакты на резисторе Нщ группы 4,
Таким образом, происходит перераспределение падения напряжения между группами резисторов 3 и 4, т.е. если на резисторе R Hf группы 3 появляется напряжение, на группе резисторов 4 напряжение уменьшается на соответствующую вепичину. Через диод Д1 на первом входе усилителя 5 появляется сигнал.
Привод отрабатывает сигнал упраления так, чтойл сигнал с потенциометра обратной связи 8 через диод Д2 скомпенсировал сигнал на входе усилителя 5.
Перемещение силового механизма 7 будет соответствовать (+1) цифрового сигнала управления.
При подаче цифрового сигнала, нпример (+2), включается реле Р2, а реЛе Р1 выключается. В группе резиторов 3 будет расшунтирован резист , а в группе резисторов 4 эашутирован резистор RHZ сопротивлением в два раза больше, чем у резистора R щ. На входе усилителя 5 появляется сигнал, в два раза превышающий сигнал, соответствующи ( + 1).
При смене полярности сигнала управления блоком 1 знака через диод ДЗ появляется соответствующий сигнал На первом входе усилителя 6. Силовой механизм отрабатывает сигнал управления в обратную сторону 5 до тех пор, пока сигнал с потенциометра обратной связи 8 через диод Д4 не скомпенсирует сигнал управления на входе усилителя б.
Предлагаемое устройство позво0 ляет уменьшить вес и габариты цифрового электропривода.
Формула изобретения
Цифровой привод, содержащий блок управления, выходы которого подключны к релейному блоку и один выход ко входу блока знака, две группы поледовательно соединенных резисторов параллельно каждому резистору первой группы подключены нормально замкнутые контакты релейного блока параллельно каждому резистору второй группы подключены нормально разомкнутые контакты релейного блока, диоды, два усилителя, выходы которых подключены ко входам силового механизма, механически связанного с движком потенциометра обратной связи, подключенным к источнику питания привода,и добавочный резистор,о тлнчающийс тем, что, с целью упрощения цифрового привода, первая группа резисторов одним концом подключена к первому выходу блока знака и к общей точке двух встречно включенных диодов, один из которых подключен к первому входу первого усилителя, второй - к первому входу второго усилителя, а вторым концом первая группа резисторов подключена к первому выводу второй группы резисторов, к средней точке потенциометра обратной связи и ко вторым входам усилителей, второй вывод второй группы резисторов подключен через добавочный резистсчр ко второму выходу блока знака, движок потенциометра обратной связи подключен к общей точке двух других встречно включенных диодов,первый из которых подключен к третьему входу первого усилителя, а второй к третьему входу второго усилителя.
Источники инфсрмации, принятые во внимание при экспертизе
1.Цифровые cHCTeNbi управления точными механизмами . Л., Наука 1967.
2. Авторское свидетельство СССР 359634, кл.С 05 В 11/16, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой привод | 1980 |
|
SU999015A1 |
| Источник питания для дуговой сварки с регулируемой крутизной вольтамперной статической характеристики | 1983 |
|
SU1100057A1 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| Устройство для контроля исправности релейной защиты | 1988 |
|
SU1644252A1 |
| Аналого-цифровой интегратор | 1977 |
|
SU732905A1 |
| Релейный преобразователь сигналов | 1975 |
|
SU547787A1 |
| Устройство для контроля исправности релейной защиты | 1982 |
|
SU1032513A1 |
| Устройство для тепловой защиты электрического аппарата | 1982 |
|
SU1100679A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ И ВЫРАВНИВАНИЯ СТЕПЕНИ ЗАРЯЖЕННОСТИ БЛОКА АККУМУЛЯТОРОВ КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2016 |
|
RU2626378C1 |
| Регулятор | 1984 |
|
SU1269094A1 |