Предметом изобретения является однофазный индукционный двигатель с пусковой обмоткой, ось которой сдвинута на 90° электрических относительно оси главной обмотки. От известных двигателей подобного рода предлагаемый двигатель отличается тем, что эта пусковая обмотка приключена к вспомогательной обмотке, трансформаторно связанной с главной обмоткой двигателя.
При этом вспомогательная и пусковая обмотки могут быть выполнены для каждого полюса в виде коротко-замкнутых обмоток, последовательно соединенных между собою, а для регулирования работы двигателя с одной его стороны могут быть расположены передвижные дугообразные шины, предназначенные для замыкания накоротко требуемого количества стержней обмотки.
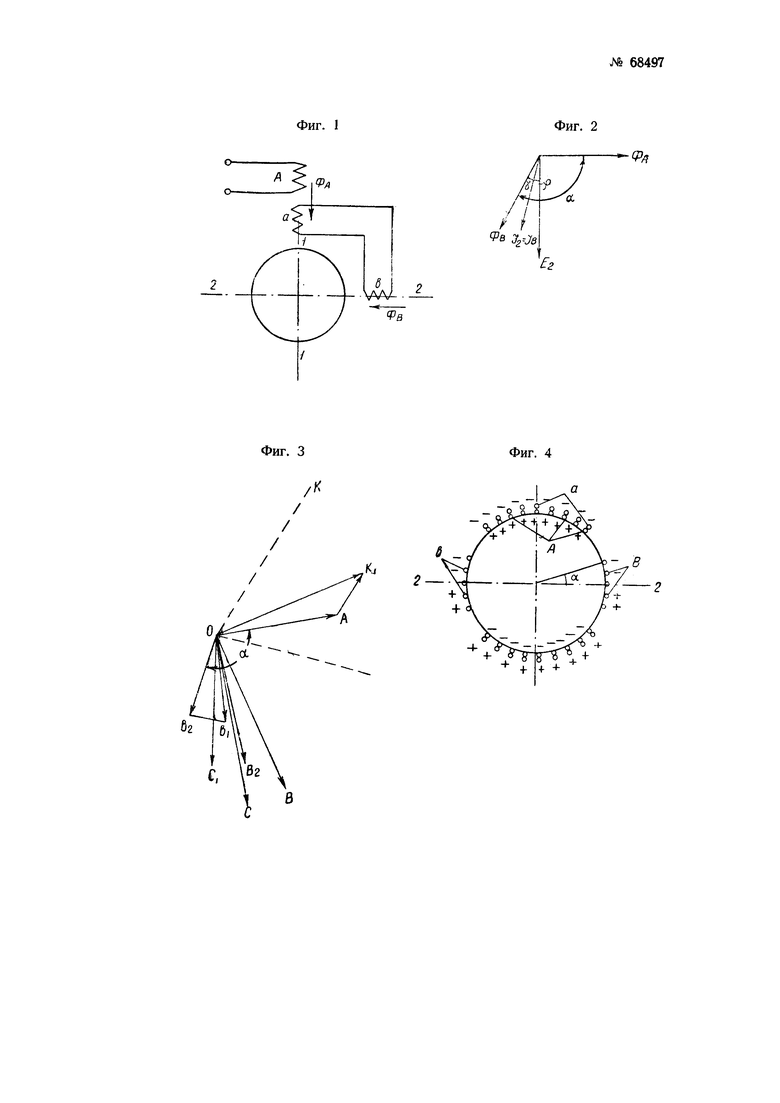
Сущность изобретения поясняется фиг. 1, на которой приведена общая схема двигателя. На фиг. 2, 3 и 7 показаны векторные диаграммы, поясняющие действие двигателя, а на фиг. 4, 5, 6, 8, 9, 10 и 11 показаны схемы расположения и соединения обмоток двигателя для различных форм выполнения.
Для получения вращающего момента в предлагаемом двигателе используется сдвиг по фазе потоков за счет добавочной трансформации (фиг. 1).
Ротор двигателя выполняется как у обычных асинхронных двигателей, например, типа «беличьей клетки».
Статор выполняется также по типу нормального статора однофазного двигателя. Однако в отличие от него здесь на статоре помещаются две добавочные обмотки а и b. Вспомогательная обмотка а трансформаторно связана с основной рабочей обмоткой А статора и электрически связана с пусковой обмоткой b, расположенной под углом в 90° (электрических) к обмоткам А и а.
Допустим, что обмотка А двигателя включена на сеть однофазного тока. Обе обмотки А и а создают результирующий трансформаторный поток ФА, пульсирующий по оси 1-1 двигателя. Под влиянием этого потока в обмотке а индуктируется отстающая на 90° э.д.с. Под углом φ к этой э.д.с. определяемым величиной сопротивлений обмоток а и b через последние протекают токи I2=I3. Под некоторым углом γ вследствие потерь в железе на диаграмме показан поток ФВ обмотки b. Для простоты пояснения на схеме (фиг. 2) не показано размагничивающее влияние ротора, сдвигающее и несколько изменяющее величины потоков ФА и ФВ.
В итоге ротор двигателя оказывается под действием двух пространственно сдвинутых потоков ФА и ФВ, которые создают вращающий момент, равный:
М=с·j·ФА·ФВ·sinα·cosφр,
где ƒ - частота,
α - угол сдвига между потоками,
φр - угол сдвига в роторе.
Так как
ФВ=c1·IB=c2E2=с3·ƒ·ФА,
где с1 с2, с3 - некоторые постоянные коэфициенты, то момент будет равен:
M=с·ƒ·с3·ƒ·ФА·ФА·sinα·cosφр=c4·ƒ2Ф2 А·sinα·cosφp.
Из этого выражения видно, что характеристика данного двигателя подобна характеристикам сериесных и репульсионных двигателей.
На фиг. 3 показана соответствующая диаграмма. Результирующий поток по оси 1-1 сквозь междужелезное пространство обозначен OA; ОС - напряжение E2 в роторе и ОС1 - ток в роторе по оси 1-1; ОК - направление результирующей м.д.с. статора и ротора по оси 1-1; АК1 - идущий по этому направлению поток, сцепленный только с обмотками A и а; ОК1 - результирующий поток обмоток А и а; ОВ - напряжение в обмотке а (отстает на угол 90° от ОК1); ОВ2 - ток в цепи обмоток а и b (отстает на угол φ); ОВ1 - поток, вызванный током ОВ2 в обмотке b; ОВ2 - результирующий поток в междужелезном пространстве по оси 2-2; угол сдвига вызван размагничивающим действием ротора и рассеянием; α - угол между потоками, создающими момент.
Из диаграммы видно, что:
1) наличие потока, сцепленного с обеими обмотками статора и не пересекающего ротор, уменьшает угол сдвига между потоками, создающими вращающий момент;
2) наличие потоков рассеяния в роторе и в дополнительных обмотках а и b увеличивает этот угол.
При погружении в большей или меньшей степени обмоток А и а в железо статора осуществляется требуемое соотношение потоков, замыкаемых вокруг обмоток статора и пересекающих ротор, и требуемый сдвиг между потоками ФА и ФВ.
Величина напряжения в обмотках а и b так же, как и в роторе, значения не имеет ввиду взаимодействия ампервитков (потоков) при получении момента. Поэтому обмотки а и b можно выполнить из небольшого числа стержней, благодаря чему обмотки получаются весьма простыми.
Направление вращения двигателя изменяется при переключении концов обмоток а и b или при изменении направления тока в обмотке b.
Достоинством предлагаемого двигателя является возможность регулирования начального и рабочего моментов вращения при изменении силы тока в цепи обмоток a и b, а следовательно, и создающих момент потоков.
Регулирование силы тока целесообразно осуществлять включением или выключением части стержней обмоток а и b, либо соединением секций этих обмоток в последовательные, параллельные или смешанные цепи.
При описании схемы, показанной на фиг. 1, условно предполагалось, что в пусковой обмотке b, создающей сдвинутый в пространстве и по фазе магнитный поток ФВ, электродвижущие силы от непосредственного действия потока главной обмотки ФА не возбуждаются.
Это явление могло бы иметь место но лишь в том случае, если бы пусковая обмотка целиком поместилась на нейтральной линии по отношению к главному потоку Ф, чего, однако, в действительности не происходит.
На фиг. 4 показано действительное расположение обмоток и знаками плюс и минус условно показано направление токов, протекающих через главную обмотку А и трансформаторно возникающих в обмотках а и b. Если предположить синусоидальное распределение в пространстве потока главной обмотки, то во всех стержнях обмотки b возникают э.д.с., пропорциональные синусу угла между осью 2-2 и стержнем обмотки.
Под влиянием этих э.д.с. в стержнях потекут токи (условно показанные на фиг. 4), сдвинутые по фазе от э.д.с. вследствие наличия сопротивлений в цепи. Создаваемый этими токами поток, несмотря на то, что он сдвинут по фазе от главного потока, не будет создавать вращающего момента, так как ось этого потока в пространстве совпадает с осью главного потока.
Действие этих витков обмотки равносильно размагничивающему действию витков ротора (правда, весьма частичному, так как токи невелики). Согласно диаграмме, показанной на фиг. 3, главный поток будет уменьшаться, а угол между потоками ФА и ФВ увеличиваться, в результате чего момент будет уменьшаться.
Для ограничения этого явления следует использовать в работе только часть стержней в одном из секторов 2-2′ или 2-2′′ (фиг. 5), оставляя в другом секторе стержни разомкнутыми. При этом, если произвести параллельное соединение активных стержней, замыкая их в клетку на статоре (фиг. 6), то двигатель приобретает новые свойства, согласно принципу Феррариса.
Сущность этого принципа заключается в том, что при помещении на пути потока закороченных витков, та часть потока, которая проходит через эти витки, будет отставать по фазе на некоторый угол от второй части потока. Наличие же сдвинутых в пространстве и по фазе потоков создает вращающий момент.
Применение этого общеизвестного принципа в данном случае обеспечивает не только получение дополнительного момента, но и изменение взаимодействия между потоками или токами, в результате чего меняется весь режим работы двигателя.
Действительно, если обмотку а статора глухо присоединить к стержням 2-2′, как показано на фиг. 5, то возникающие в этих стержнях э.д.с. от главного потока ФА будут противодействовать и частично уменьшать ток, текущий из обмотки а в обмотку b, т.е. в стержни 2-2′.
При том же глухом присоединении к стержням 2-2′′ вместо стержней 2-2′, токи обмоток будут почти складываться, и в результате ток цепи обмоток а и b будет увеличиваться. Последнее наглядно видно на фиг. 4.
То же самое можно осуществить в обмотке а, т.е. присоединить стержни 3-3′ или 3-3′′ вместо стержней 3′-3′′, как предполагалось ранее.
Рассмотрим режим работы двигателя, который получится, если стержни 3′-3′′ обмотки а соединены параллельно в клетку и присоединены к стержням в секторе 2-2′, также замкнутым в клетку. Диаграмма потоков для этого случая схематически показана на фиг. 7, где Ф′А обозначает часть потока, проходящую через сектор 2-2′, а ФА′′ - остальную часть потока ФА, имеющую малый сдвиг по фазе по отношению к потоку ФА. Подобное соединение осуществляется также в другой половине двигателя и в результате в секторах 2-2′ и 21-2′1, т.е. на значительной части окружности ротора двигателя получается сдвиг почти на 90° между потоками ФА и ФВ через эти секторы.
В остальной части двигателя взаимодействуют потоки с углами сдвига, практически близкими к тем, которые получаются в двигателе от трансформации.
В двигателе возможен также режим работы с изменением потока ФВ, для чего должны быть замкнуты стержни обмотки а на разной длине в секторе 3′-3′′.
Указанные режимы работы обеспечиваются соответствующим конструктивным оформлением двигателя, один из вариантов которого приведен на фиг. 8.
В секторах 3′-3′′ статора прокладываются стержни, замкнутые с одной стороны в кольцо, как показано пунктиром. К кольцу присоединяются стержни, уложенные в секторах 2′-2′′ и 21′-21′′.
На открытые, не замкнутые кольцом части стержней укладываются дугообразные шины а-а и b-b. Между шинами а и b так же, как и между шинами a1 и b1 производится соединение.
Шины а и b можно соединить со стержнями наглухо, выбрав наилучший режим работы двигателя. Можно также осуществить двигатель с передвигающимися по стержням шинами, что позволит регулировать силу тока и вращающий момент во время работы двигателя. Регулирование возможно также путем изменения силы тока, создающего поток ФВ при включении сопротивления между шинами а и b и между шинами а1 и b1.
На фиг. 8 стержни под шинами а и а1 условно показаны погруженными и железо статора глубже, чем под шинами b и b1.
Соответствующим смещением шин можно всегда обеспечить сдвиг на 90° между потоками, создающими вращающий момент.
Изменение направления вращения двигателя легко осуществляется либо передвижением осей системы шин на 90°, либо переключением шин, т.е. соединением шины а с b1 и а1 с b вместо соединения, показанного на фиг. 8.
Общими достоинствами предлагаемого двигателя являются простота конструкции, широкое регулирование момента вращения, имеющего сериесный характер и, наконец, простое реверсирование двигателя.
На фиг. 10 и 11 показаны несколько измененные формы выполнения предлагаемого двигателя, причем для сравнения на фиг. 9 приводится также соединение по основному варианту.
При соединении по схеме фиг. 9, как это было указано выше, стержни а соединяются параллельно в витки, охватывающие весь поток, и последовательно с этими стержнями соединяются стержни b, также соединенные в витки.
Возможно также выполнение пусковой и вспомогательных обмоток на каждый полюс в виде короткозамкнутых обмоток, соединяемых последовательно между собой, как показано на фиг. 10.
При соединении обмоток по схеме фиг. 11, где показана одна половина двухполюсного статора, стержни а соединяются в параллельные витки, так же как и по схеме фиг. 10. Изменяется лишь соединение стержней а со стержнями b, создающими поперечный поток. Группа стержней b, не соединенных в витки, с одной стороны статора соединяется с группой витков, состоящих из стержней а. Такая схема соединений приводит к большим токам в цепи обмоток а и b ввиду малого сопротивления обмотки b и к большим значениям поперечного потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный двигатель | 1941 |
|
SU66575A1 |
| СИНХРОННАЯ МАШИНА С САМОВОЗБУЖДЕНИЕМ | 2000 |
|
RU2168833C1 |
| Однофазный серверный коллекторный двигатель | 1933 |
|
SU41074A1 |
| СТАТОР РЕВЕРСИВНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2121206C1 |
| УСТРОЙСТВО ПИТАНИЯ ОБМОТКИ ВОЗБУЖДЕНИЯ В БЕСКОНТАКТНЫХ ВЕНТИЛЬНЫХ ДВИГАТЕЛЯХ С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2277291C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПОСТОЯННОГО ТОКА | 1934 |
|
SU51345A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАБОТЫ АСИНХРОННОЙ КОРОТКОЗАМКНУТОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И АСИНХРОННАЯ КОРОТКОЗАМКНУТАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2393613C1 |
| Электрическая машина постоянного тока | 1990 |
|
SU1836787A3 |
| ОДНОФАЗНЫЙ КОЛЛЕКТОРНЫЙ СЕРИЕСНЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА | 1937 |
|
SU53442A1 |

1. Однофазный индукционный двигатель с пусковой обмоткой, ось которой сдвинута на 90° электрических относительно оси главной обмотки, отличающийся тем, что указанная пусковая обмотка приключена к вспомогательной обмотке, трансформаторно связанной с главной обмоткой двигателя.
2. Форма выполнения двигателя по п. 1, отличающаяся тем, что вспомогательная и пусковая обмотки выполнены для каждого полюса в виде короткозамкнутых обмоток, последовательно соединенных между собой.
3. Применение в двигателе по пп. 1 и 2 с целью регулирования его работы расположенных с одной стороны двигателя передвижных дугообразных шин, предназначенных замыкать накоротко требуемое количество стержней обмоток.
