Изобретение относится к гироскопическим устройствам и может быть применено в навигации и ориентации различных объектов, а также в других областях, где необходимо обеспечить управление подвижной массой при энергетических и временных ограничениях.
Известны различные гироскопы с электростатическим подвесом ротора [1, 2] . Такие гироскопы содержат в электрическом подвесе полый или сплошной ротор, выполненный из легкого электропроводящего материала, чаще всего из бериллия. Съем сигнала об угловом положении вращающегося ротора обычно осуществляют с помощью оптических датчиков.
Наиболее близкими к предлагаемому являются электростатические гироскопы с полым ротором, в которых для создания преимущественной, т.е. главной, оси инерции масса ротора неравномерно распределена вдоль этой оси (фиг. 1): ее большая часть расположена вблизи экватора и уменьшается по мере приближения к полюсам.
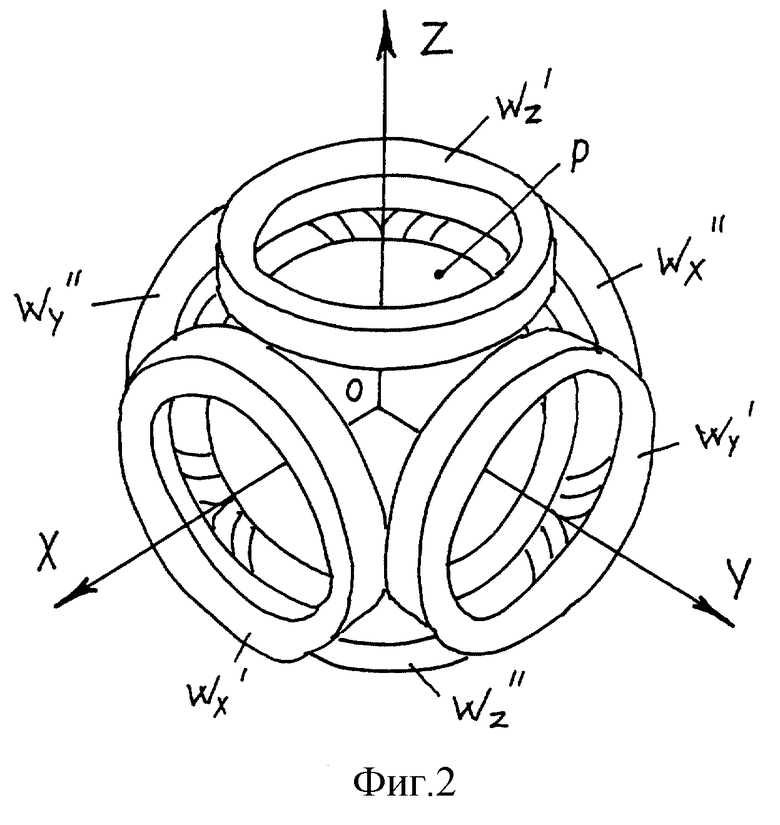
В качестве прототипа выбираем электростатический гироскоп, описанный в [1] . Этот гироскоп содержит (фиг. 2) четыре экваториальные катушки W'X, W''X; W'Y, W''Y и две полярные W'Z, W''Z, образующиe три обмотки статора WX, WY и WZ. С помощью экваториальных катушек осуществляется вращение ротора подобно двухфазному асинхронному двигателю. На одну пару соосных катушек подается напряжение требуемой частоты, а на другую пару катушек, ось которых расположена ортогонально, - напряжение той же частоты, но сдвинутое по фазе на 90o.
Достоинством прототипа является то, что кроме разгона ротора до номинальной скорости в этом гироскопе подачей постоянного напряжения на демпфирующие катушки W'Z и W''Z обеспечено приведение оси вращения ротора к оси демпфирующей обмотки и гашение нутационных колебаний ротора (пассивное приведение).
Недостатком прототипа является то, что при пассивном демпфировании в обмотке и в роторе выделяется значительная тепловая энергия, при этом время приведения ротора и демпфирования нутаций достигает 30 мин. В результате увеличивается время готовности гироскопа к высокоточным измерениям, которые осуществляют по окончании тепловых переходных процессов, вызванных разгоном ротора до номинальной скорости и приведением.
Особенно сильно эти недостатки проявляются в бескарданных электростатических гироскопах, в которых положение оси вращения ротора может быть произвольным или привязано к любой из взаимно ортогональных осей X, Y, Z статора (корпуса гироскопа).
Специалистам в области гироскопии известны способы активного управления движением ротора с помощью датчиков угла прецессии, датчиков момента и усилительно-преобразовательных устройств [3]. Однако в устройстве-прототипе нет датчиков, необходимых для активного гашения нутаций и приведения ротора. Датчик момента отсутствует, так как для повышения точности измерений гироскоп сделан неуправляемым. Оптические датчики угла "карданных" электростатических гироскопов не могут быть использованы, так как их диапазон измерений ограничен углами 3-5o, а амплитуда нутаций может достигать 90o.
В бескарданных гироскопах [1] на роторе нанесен рисунок и шесть оптических датчиков (по два на каждую пространственную ось) позволяют измерять углы поворота оси вращения ротора в пределах ±50o. Однако и эти датчики имеют крупный недостаток. Для работы таких оптических датчиков необходимо, чтобы главная ось инерции ротора совпадала с осью вращения. Но ротор взвешивается в произвольном положении, и ось вращения может быть ортогональна главной оси инерции ротора. В этом случае все оптические датчики оказываются неработоспособными и необходимо проводить пассивное приведение и демпфирование нутаций.
Недостатком таких оптических датчиков является также то, что они работают на номинальной скорости вращения ротора 300-500 Гц, так как измеряют фазовый сдвиг модуляционного сигнала относительно опорного. Кроме того, они имеют узкую полосу пропускания и не способны измерять нутационные движения ротора, частота которых близка к частоте вращения.
Рассмотренные недостатки прототипа устранены в предлагаемом электростатическом гироскопе, содержащем в электрическом подвесе сферический ротор с единственной осью электрической симметрии, совпадающей с главной осью инерции, и три обмотки статора вращения, центральные оси которых расположены по взаимно ортогональным осям корпуса гироскопа и пересекаются в центре подвеса ротора, во-первых, благодаря тому, что одна из обмоток подключена к генератору частоты измерения, а две другие - к измерителям величины напряжения этой частоты. Во-вторых, благодаря тому, что в него введены первый, второй и третий источники тока, управляемые напряжением, каждый из которых выходом подключен к одной обмотке статора, и первый и второй двухвходовые измерительные сумматоры, подключенные соответственно первым входом к выходу одноименного источника тока, вторым входом через фазирующую цепь - к его входу, а выходами - к измерителям величины напряжения частоты измерения, а также двухвходовый сумматор возбуждения, выходом подключенный к входу третьего источника тока, а первым входом - к генератору частоты измерения, и генератор частоты управления, основной выход которого подключен ко второму входу сумматора возбуждения, а квадратурный выход - через управляющие устройства подключен к входам первого и второго источников тока.
Сущность изобретения поясняется чертежами, на которых изображено:
фиг. 1 - полый ротор гироскопа;
фиг. 2 - статор вращения гироскопа с тремя обмотками и шестью катушками;
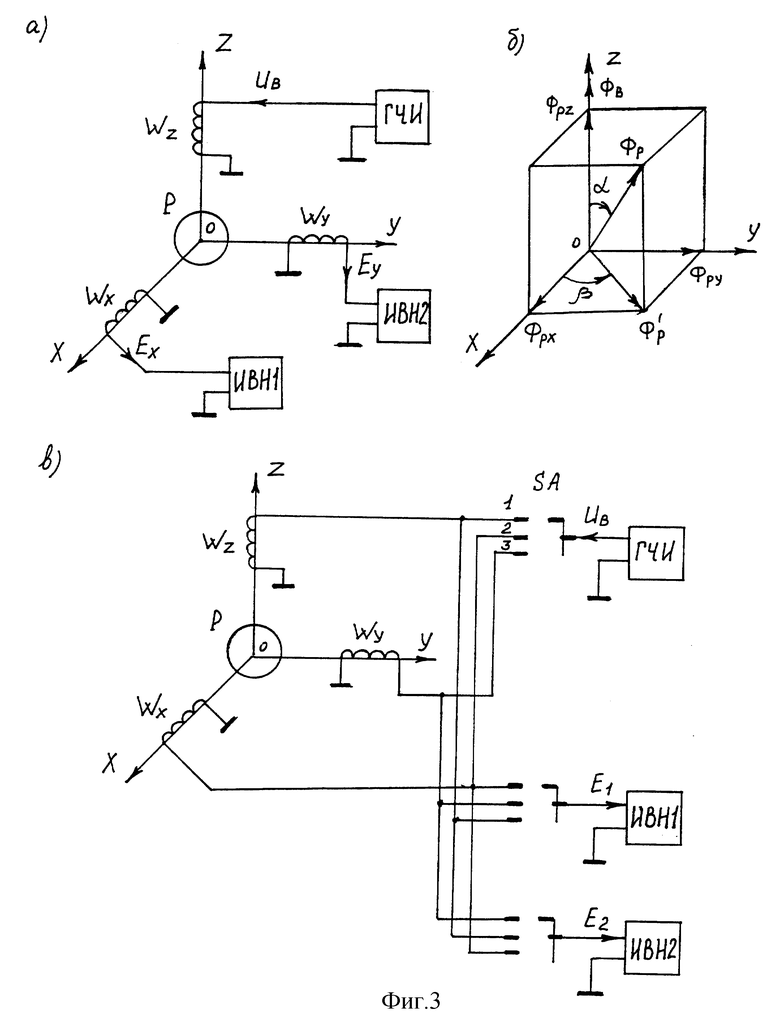
фиг. 3 - а) схема построения двухкоординатного измерителя угла поворота ротора;
б) векторная диаграмма потоков в измерителе угла;
в) трехосный измеритель угла поворота ротора;
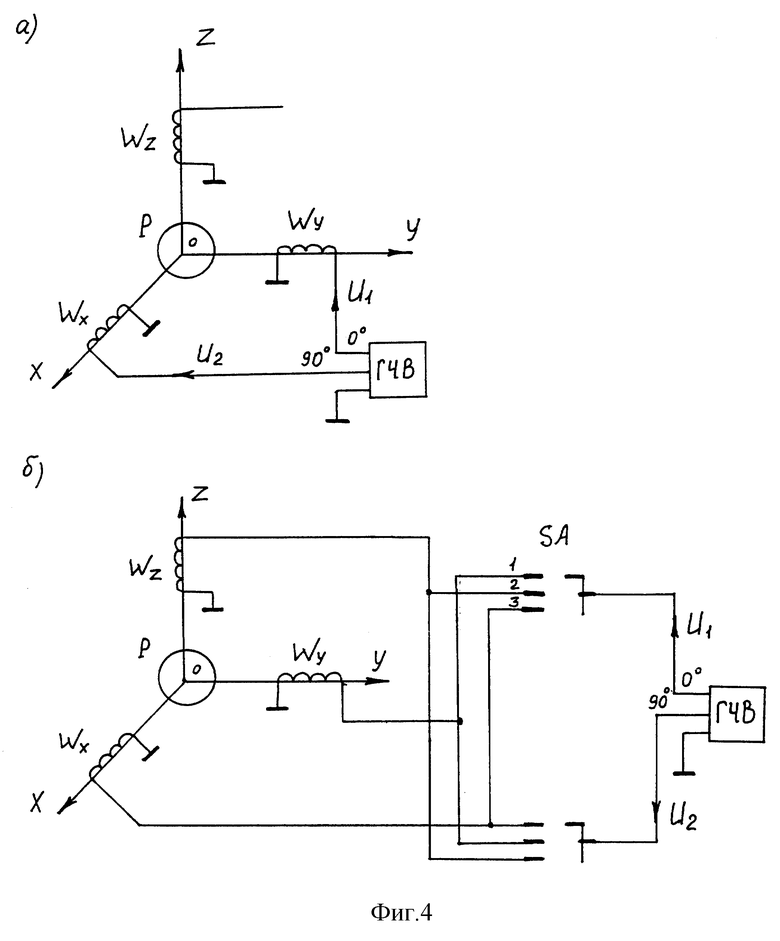
фиг. 4 - а) схема построения асинхронного двухфазного гиромотора;
б) трехосный гиромотор;
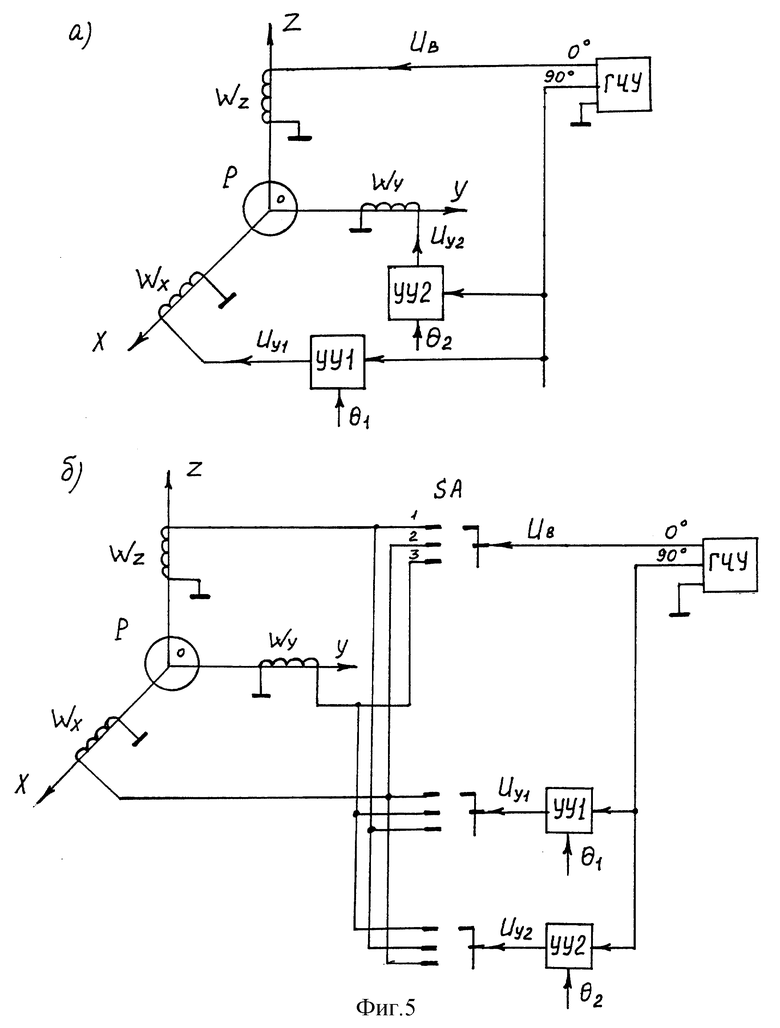
фиг. 5 - а) схема построения двухкоординатного датчика момента;
б) трехосный датчик момента;
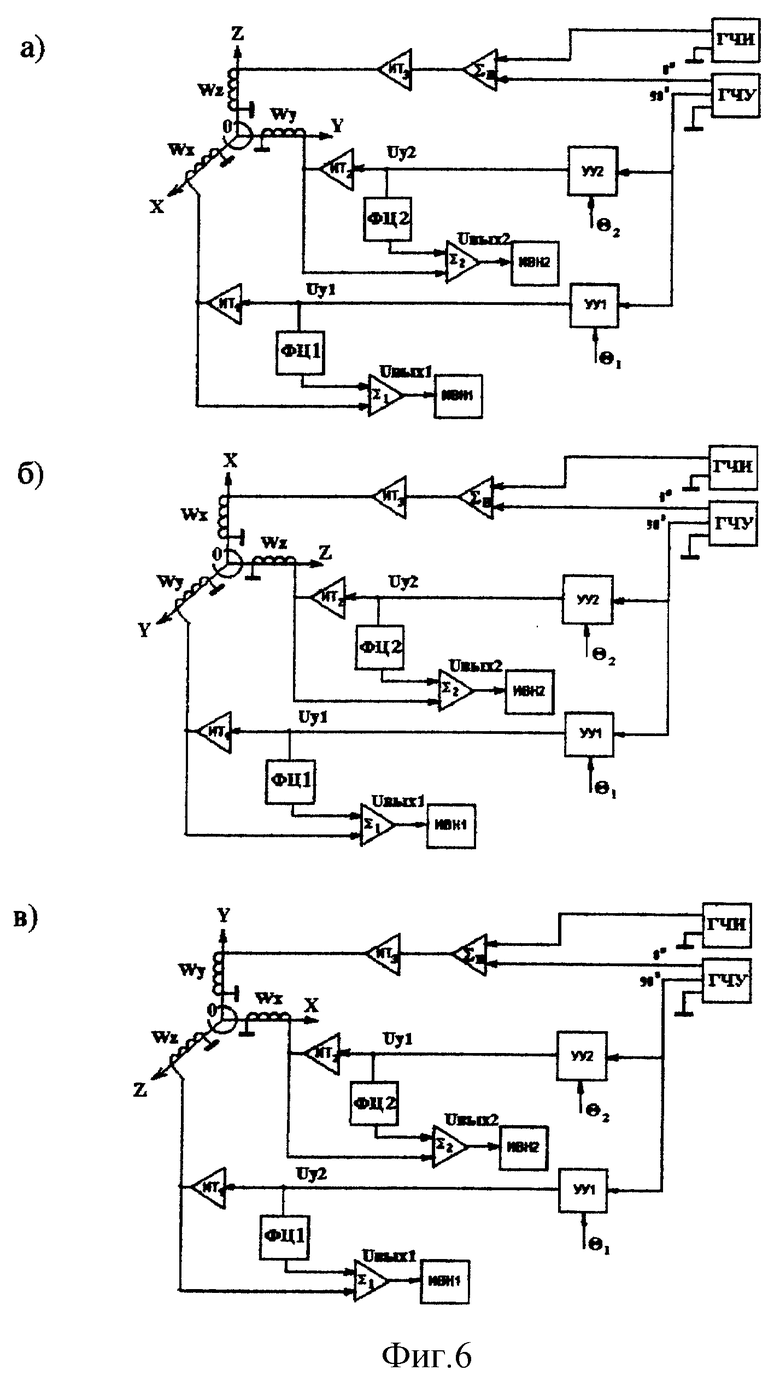
фиг. 6 - схемы гироскопа с совмещенными двухкоординатными датчиками угла и момента:
а) относительно оси Z;
б) относительно оси X;
в) относительно оси Y;
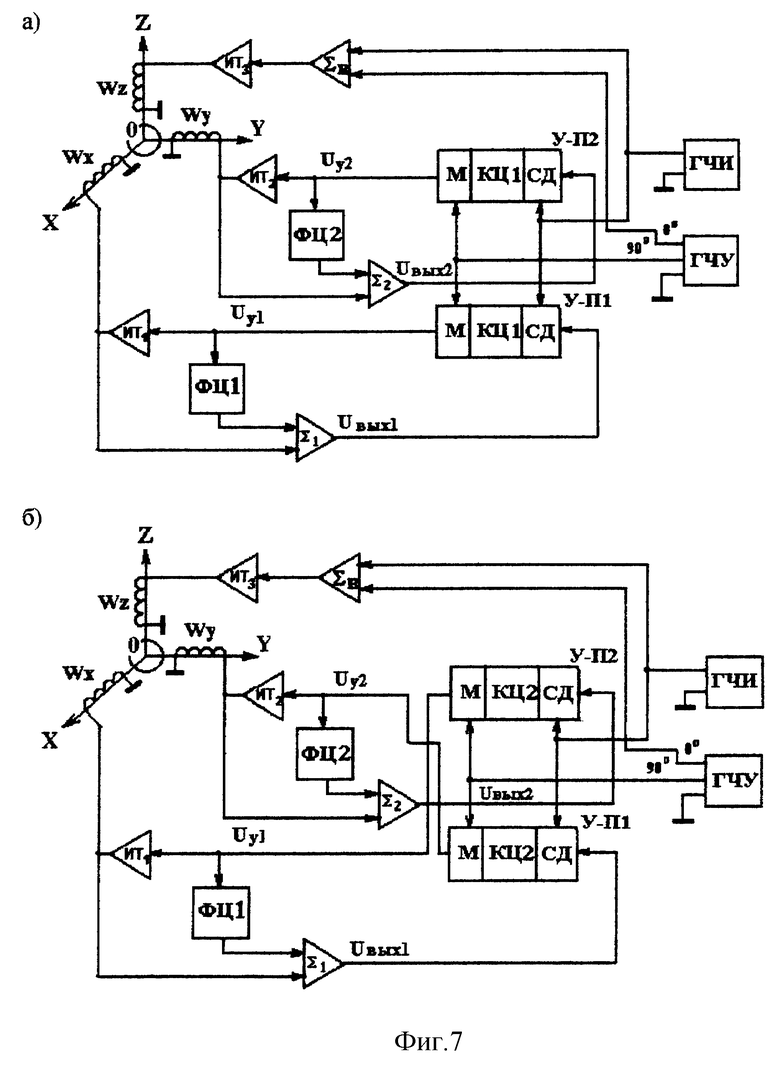
фиг. 7 - непрерывные системы управления положением оси симметрии ротора:
а) система начальной выставки невращающегося ротора;
б) система приведения и гашения нутаций ротора.
На фиг. 1-7 приняты следующие обозначения:
X, Y, Z - пространственные взаимно-ортогональные оси статора (корпуса гироскопа);
O - центр подвеса ротора, начало координат;
O-O - ось симметрии ротора;
Wx, Wy, Wz - обмотки статора, оси которых расположены по соответствующим осям корпуса;
W'x, W''x; W'y, W''y, W'z, W''z - первая и вторая катушки соответствующих обмоток;
ГЧИ - генератор частоты измерения;
ГЧУ - генератор частоты управления;
ГЧВ - генератор частоты вращения;
ИВН1, ИВН2 - измерители величины напряжения;
EX, EY, EZ - ЭДС на выходах обмоток по осям;
Фв, Фр - электромагнитные потоки: возбуждения и ротора;
Ф' p - проекция потока ротора на плоскость XOY;
Фрх, Фру, Фpz - проекции потока ротора на оси координат;
α - угол между потоками Фв и Фр;
β - угол между осью X и потоком Ф'р;
УУ1, УУ2 - устройства управления;
θ1,θ2 - задающие сигналы по осям управления;
0o, 90o - фазовые сдвиги между напряжениями на выходах генератора;
E1, E2 - ЭДС на входе измерителей;
Р - ротор;
ИТ1, ИТ2, ИТ3 - источники тока;
Σ1,Σ2 - измерительные двухвходовые сумматоры;
Σв - двухвходовый сумматор возбуждения;
ФЦ1, ФЦ2 - фазирующие цепи;
SA - трехпозиционный переключатель;
1,2,3 - состояния трехпозиционного переключателя;
Uв - напряжение возбуждения;
Uу1, Uу2 - напряжения управления;
U1, U2 - напряжения вращения;
Uвых1, Uвых2 - выходные напряжения измерительных сумматоров;
У-П1, У-П2 - усилительно-преобразовательные устройства;
СД - синхронный детектор;
КЦ1, КЦ2 - корректирующие цепи;
М - модулятор.
Предлагаемый гироскоп (фиг. 2), как и прототип, содержит осесимметричный сферический электропроводящий ротор в электрическом подвесе и три обмотки Wx, Wy и Wz статора вращения, оси которых расположены взаимно ортогонально и пересекаются в центре подвеса ротора. Каждая обмотка содержит по две расположенные соосно и симметрично по обе стороны от ротора (от центра подвеса) катушки W'x, W''x; W'y, W''y, W'z, W''z, которые могут быть соединены параллельно или последовательно. Катушки имеют одинаковое число витков и диаметр провода. Потоки катушек одной обмотки имеют одно направление, т.е. каждая обмотка образует одну пару полюсов N-S.
Отличительной особенностью предлагаемого гироскопа прежде всего является то, что в нем одна из обмоток статора вращения, например Wz, подключена к генератору частоты измерения ГЧИ, а две другие - к измерителям величины напряжения ИВН этой частоты (фиг. 3а).
Работа такого гироскопа основана на том, что при подаче переменного напряжения от генератора ГЧИ в обмотку Wz (фиг. 3а) в гироскопе создается электромагнитный поток возбуждения Фв, который пронизывает ротор. Проведенные авторами исследования показали, что в этом случае распределенная вдоль главной оси инерции электропроводящая масса ротора ведет себя как сосредоточенный на экваторе короткозамкнутый виток, ось электрической симметрии которого совпадает с главной осью инерции ротора. Под действием потока возбуждения Фв в "витке" ротора создается ток и магнитный поток ротора Фр, направленный по оси симметрии, т.е. по главной оси инерции ротора. Поток Фр создает в ортогональных к потоку возбуждения Фв обмотках Wx и Wy статора ЭДС Eх и Eу, зависящие от углового положения ротора. По показаниям измерителей величины напряжения ИВН1 и ИВН2, подключенных к обмоткам Wx и Wy, определяются углы поворота ротора в пространстве. В качестве таких измерителей в зависимости от требуемой мощности или структуры системы могут быть использованы обычные вольтметры, селективные (т.е. настроенные на конкретную частоту) вольтметры, а также вольтметры с синхронными детекторами, измеряющие синфазную и квадратурную составляющие напряжения, аналого-цифровые анализаторы (преобразователи) и т.п. устройства.
Рассмотрим основные соотношения. Пусть (фиг. 3б) ось ротора составляет с осью обмотки возбуждения Wz угол α, а ее проекция на плоскость XOY отклонена от оси X на угол β. Тогда для магнитного потока ротора Фр и его проекции на плоскость XOY Ф'р можно записать
где k1 - комплексный коэффициент передачи, учитывающий связь между потоками.
Проекции потока Фр на оси X и Y определяются выражениями
Отсюда следует, что ЭДС Ex и Ey, наводимые потоками Фpx и Фpy в обмотках Wx и Wy, определяются выражениями
Здесь k2 - коэффициент, учитывающий число витков обмоток и частоту генератора ГЧИ.
Из (3) следует, что в предлагаемом гироскопе для определения положения главной оси инерции ротора в пространстве относительно оси потока возбуждения в пределах ±180o и для управления движением ротора в плоскостях ZOX и ZOY можно использовать ЭДС, снимаемые с обмоток. Двойная электрическая редукция, возникающая в таком измерителе угла, создает в системах управления большие преимущества, так как увеличивает крутизну сигнала вблизи нуля и улучшает отношение сигнал-помеха. Что касается ложных нулей, то они соответствуют углам поворота ротора на ±90o и оказываются на участке характеристики с отрицательным наклоном. В системе регулирования эти нули будут неустойчивыми и ось симметрии ротора будет устанавливаться по заданной оси в положение 0o или 180o.
Большим преимуществом предлагаемого гироскопа перед известными является то, что в нем измеритель угла позволяет определять положение ротора в пространстве относительно любой из осей X, Y или Z. На фиг. 3в показано, как (с помощью переключателя SA или без него) подключением генератора ГЧИ и измерителей ИВН1 и ИВН2 к соответствующим обмоткам создать двухкоординатный датчик угла поворота ротора относительно любой из осей X, Y и Z.
На фиг. 4а показано, как с помощью генератора частоты вращения ГЧВ с основным и квадратурным (т.е. с напряжением, сдвинутым по фазе на 90o) выходами в предлагаемом гироскопе обеспечить вращение ротора вокруг оси Z. На фиг. 4б - как обеспечить вращение ротора вокруг любой из осей X, Y или Z.
На фиг. 5a показано, как в предлагаемом гироскопе с помощью генератора частоты управления ГЧУ с основным и квадратурными выходами создать двухкоординатный датчик момента, обеспечивающий реверсивный поворот ротора вокруг осей X и Y. Для этого один выход генератора ГЧУ необходимо подключить, например, к обмотке Wz, а другой выход - с напряжением, сдвинутым по фазе на 90o - к обмоткам Wx и Wy через управляющие устройства УУ1 и УУ2. В этом случае в гироскопе создаются вращающие моменты в плоскостях ZOX и ZOY. Здесь важно, что в плоскости XOY вращающий момент не возникает, так как фазовый сдвиг между напряжениями Uу1 и Uу2 равен нулю. В качестве управляющих устройств УУ1 и УУ2 здесь могут быть применены потенциометры, вращающиеся трансформаторы, модуляторы, цифроаналоговые преобразователи и т.п. элементы. При необходимости обеспечения мощности управления между управляющими устройствами и обмотками устанавливаются усилители. На фиг. 5б показано, как построить двухкоординатный датчик момента относительно любой из осей X, Y и Z. Изменение величины и фазы каждого из напряжений управления, т.е. величин и знаков вращающих моментов, осуществляется по сигналам управления θ1 и θ2.
На основании изложенного становится ясно, что достоинством предлагаемого гироскопа является реализованная возможность построения по любой заданной оси X, Y или Z как датчиков угла, так и датчиков момента, и, следовательно, систем начальной выставки (арретирования) при невращающемся роторе и систем приведения и гашения нутационных колебаний при вращающемся роторе. Установка невращающегося ротора в заданное положение с помощью системы начальной выставки позволяет существенно уменьшить не только время приведения ротора, но и свести к минимуму амплитуду начальных нутационных колебаний. Для построения системы необходимо, например, ЭДС Еx (фиг. 3а) подать на одноименную обмотку датчика момента через усилительно-преобразовательное устройство. Соответственно ЭДС Еу измерителя угла необходимо также через усилитель-преобразователь подать на одноименную обмотку датчика момента. В системе приведения и гашения нутаций связь между координатами датчика угла и датчика момента - перекрестная.
Таким образом, в предлагаемом гироскопе по п. 1 формулы могут быть реализованы различные схемы измерения угла поворота ротора и активного управления движением ротора, но только с разделением во времени сигналов управления, измерения и вращения. Генераторы ГЧВ и ГЧУ можно объединить, тогда частоты управления и вращения будут одинаковыми.
Функциональные возможности гироскопа по п. 1 формулы могут быть расширены, а структура систем начальной выставки, приведения и гашения нутационных колебаний ротора упрощена, если создать непрерывный контур управления без разделения во времени сигналов управления и измерения.
В соответствии с п. 2 формулы в предлагаемом гироскопе эта задача решена комплексно, благодаря тому что в нем (фиг. 6) к обмоткам Wx, Wy и Wz подключены мощные источники тока ИТ1, ИТ2 и ИТ3, управляемые напряжениями. К выходам источников тока ИТ1 и ИТ2 подключены первые входы двухвходовых измерительных сумматоров Σ1 и Σ2, выходы которых подключены к измерителям величины напряжения ИВН1 и ИВН2. Вторые входы измерительных сумматоров подключены к входам соответствующих источников тока через фазирующие цепи ФЦ1 и ФЦ2. Теперь обмотки и электронные устройства образуют функциональные узлы, способные выполнять различные функции, в том числе одновременно датчиков угла и датчиков момента. На фиг. 6 показано, что для этого генератор ГЧИ и основной выход генератора ГЧУ подключены к источнику тока ИТ3 через двухвходовый сумматор ΣВ возбуждения, а квадратурный выход генератора ГЧУ через управляющие устройства УУ1 и УУ2 подключен к входам источников тока ИТ1 и ИТ2.
Работа предлагаемого гироскопа по п. 2 формулы основана на том, что в нем на одних и тех же обмотках статора вращения обеспечено независимое и одновременное выполнение функции измерения углового положения ротора и управления движением ротора. Действительно, при подаче напряжений частот измерения и управления в обмотку возбуждения, например Wz (фиг. 6а), в гироскопе создается суммарный поток возбуждения двух различных частот. Обмотки статора электростатического гироскопа установлены без магнитопроводов (во избежание влияния остаточной намагниченности), поэтому источники тока обеспечивают линейную зависимость между входным напряжением, выходным током и потоком обмотки. При возбуждения потоков двух частот одной обмоткой без магнитопровода исключается возникновение комбинационных частот, создающих помехи при измерении углов поворота ротора.
Информация об угле поворота ротора снимается с обмоток Wx и Wy, ортогональных к обмотке возбуждения Wz, и проходит в виде напряжения частоты измерения через сумматоры Σ1 и Σ2.
Однако напряжения на выходах сумматоров Σ1 и Σ2 содержат также напряжения на частоте управления от источников тока ИТ1 и ИТ2, поэтому на второй вход каждого измерительного сумматора Σ1 и Σ2 подано входное напряжение источника тока, компенсирующее это напряжение помехи. С помощью фазирующих цепей ФЦ1 и ФЦ2 осуществляется подбор фазового сдвига компенсирующего напряжения, в результате чего напряжение управления в канале измерения уменьшается не менее чем в 100 раз. Дальнейшая фильтрация напряжения частоты управления полностью исключает его влияние на измерение углов поворота ротора.
Напряжения управления, поступающие на вход источников тока ИТ1 и ИТ2 преобразуются в токи и потоки обмоток Wx и Wy, которые взаимодействуют с потоком возбуждения той же частоты, и создают в ортогональных плоскостях XOZ и YOZ вращающие моменты. Эти моменты в системах управления обеспечивают установку оси симметрии (инерции) ротора по оси потока возбуждения или другое необходимое воздействие на ротор. В результате создается не только движение оси симметрии ротора к заданной оси "в среднем", т.е. приведение, но и более сложное движение, обеспечивающее ускоренное гашение нутационных колебаний.
Наличие в предлагаемом гироскопе источников тока и измерительных сумматоров не только обеспечивает одновременное функционирование устройств управления и измерения, но и создает много других преимуществ.
В реальном гироскопе из-за конструктивных особенностей не удается сделать все катушки статора вращения одинаковыми. Одинаковы в них только число витков и диаметр провода, а геометрические размеры и конфигурация экваториальных и полярных катушек различна, т.е. различна и индуктивность. Кроме того, даже экваториальные катушки по осям X и Y отличаются не только размерами, но и наличием "посторонних" устройств: вакуумного насоса, оптических датчиков и т.п. В предлагаемом гироскопе все эти различия устраняют источники тока, так как преобразование из напряжения в ток и поток идет без искажений по амплитуде и фазе. Для высокоточной работы систем очень важно, что это преобразование не зависит от величины омического сопротивления обмоток, от изменения этого сопротивления (как при изготовлении, так и от температуры), от различий индуктивностей и т.п.
В результате фазовые сдвиги напряжений в каналах измерения, влияющие на крутизну, точность и стабильность нуля систем, практически не зависят от параметров обмоток статора. Кроме того, фазовые сдвиги между магнитными потоками в датчике момента, влияющие на его коэффициент передачи, также не зависят от параметров обмоток, а поддерживаются равными 90o в строгом соответствии со сдвигом между напряжениями на выходах генератора ГЧУ.
Другое важное преимущество предлагаемого гироскопа перед известными проявляется при необходимости изменения ориентации вектора кинетического момента гироскопа, например, по осям X, Y и Z. Для этого в предлагаемом гироскопе достаточно изменить ориентацию суммарного потока возбуждения датчика угла и датчика момента при начальной выставке и соответственно изменить ориентацию потоков управления и схему подключения измерительных каналов (фиг. 6а, б, в). Переориентация ротора осуществляется, таким образом, при неизменном положении корпуса гироскопа в течение 5 с при невращающемся роторе.
На фиг. 7а дан пример построения системы начальной выставки ротора гироскопа. Выходы сумматоров Σ1 и Σ2 подключены соответственно через усилители-преобразователи У-П1 и У-П2 к входам источников тока ИТ1 и ИТ2. Каждый усилитель- преобразователь содержит синхронный детектор СД, цепь коррекции КЦ1 и модулятор М. Опорные цепи синхронных детекторов подключены к выходу генератора ГЧИ, а опорные цепи модулятора - к квадратурному выходу генератора ГЧУ.
Работа системы основана на том, что при подаче напряжения двух частот на вход источника тока ИТ3 обмотка Wz создает в гироскопе по оси Z потоки возбуждения датчика угла и датчика момента. На выходах сумматоров Σ1 и Σ2 возникают напряжения рассогласования между осью возбуждения и осью симметрии ротора. Эти напряжения в усилителях-преобразователях У-П1 и У-П2 преобразуются по величине и частоте в напряжения управления Uу1 и Uу2 и поступают соответственно через источники тока ИТ1 и ИТ2 в обмотки Wx и Wy. Потоки обмоток Wx и Wz, а также Wy и Wz создают вращающие моменты, под действием которых главная ось инерции ротора устанавливается по оси Z, и напряжения на выходах сумматоров Σ1 и Σ2 становятся равными нулю. Устойчивость системы обеспечивается одинаковыми цепями коррекции КЦ1.
Для построения системы приведения и гашения нутаций (фиг. 7б) необходимо после разгона ротора поменять местами выходы преобразователей У-П1 и У-П2 и переключить цепи коррекции на КЦ2.
В схемах фиг. 7а,б функции измерителей ИВН1 и ИВН2 выполняют синхронные детекторы СД усилителей-преобразователей У-П1 и У-П2. Постоянные напряжения на выходе этих синхронных детекторов отражают положение ротора в координатах X и Y относительно оси Z. Функцию управляющих устройств УУ1 и УУ2 выполняют модуляторы М преобразователей У-П1 и У-П2. Они преобразуют постоянные напряжения с выходов синхронных детекторов, прошедшие через цепи коррекции КЦ1 (или КЦ2), в напряжения переменного тока частоты управления.
В предлагаемом гироскопе подачей соответствующих напряжений на входы источников тока ИТ1, ИТ2 и ИТ3 можно обеспечить вращение ротора не только по осям X, Y и Z, но и в любом направлении.
Начальная выставка ротора, приведение и гашение нутационных колебаний также могут быть осуществлены не только по осям X, Y и Z, но и в любом направлении. Для этого на входы усилителей-преобразователей У-П1 и У-П2 (фиг. 7) необходимо подать дополнительные напряжения, соответствующие угловым отклонениям ротора от осей.
Таким образом, в предлагаемом гироскопе обеспечивается выполнение всех необходимых функций датчика угла, датчика момента и гиромотора, что позволяет создавать различные системы управления.
В результате удалось создать гироскоп, обладающий принципиально новыми свойствами. В нем впервые обеспечены:
- начальная выставка главной оси инерции невращающегося ротора в любое заданное направление;
- раскрутка ротора в любом заданном направлении;
- активное приведение оси вращения ротора к заданному направлению.
Список литературы
1. Малеев П.И. Новые типы гироскопов. Л.: Судостроение, 1971, с. 19-23.
2. Leger P., Bihan F. Le Gyroscope a suspension electrostatique.- Navigation, 1984, avril, vol. 32, # 126, p. 223-238.
3. Бесекерский B.A., Фабрикант E.A. Динамический синтез систем гироскопической стабилизации.- Л.: Судостроение, 1968, с. 313-324.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА | 1998 |
|
RU2154257C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056643C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056642C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| Активный виброизолятор | 1986 |
|
SU1328616A1 |
Гироскоп предназначен для установки главной оси инерции ротора в любом направлении за минимальное время при ограниченной мощности. Гироскоп содержит сферический ротор в электрическом подвесе, три обмотки статора вращения. Одна из обмоток подключена к генератору частоты измерения, а две другие - к измерителям величины напряжения этой частоты. На трех взаимно ортогональных обмотках статора вращения обеспечено функционирование трехосного двухкоординатного датчика угла, трехосного двухкоординатного датчика момента, трехосного гиромотора, а также системы начальной выставки невращающегося ротора и системы приведения и гашения нутации. 1 з.п. ф-лы, 7 ил.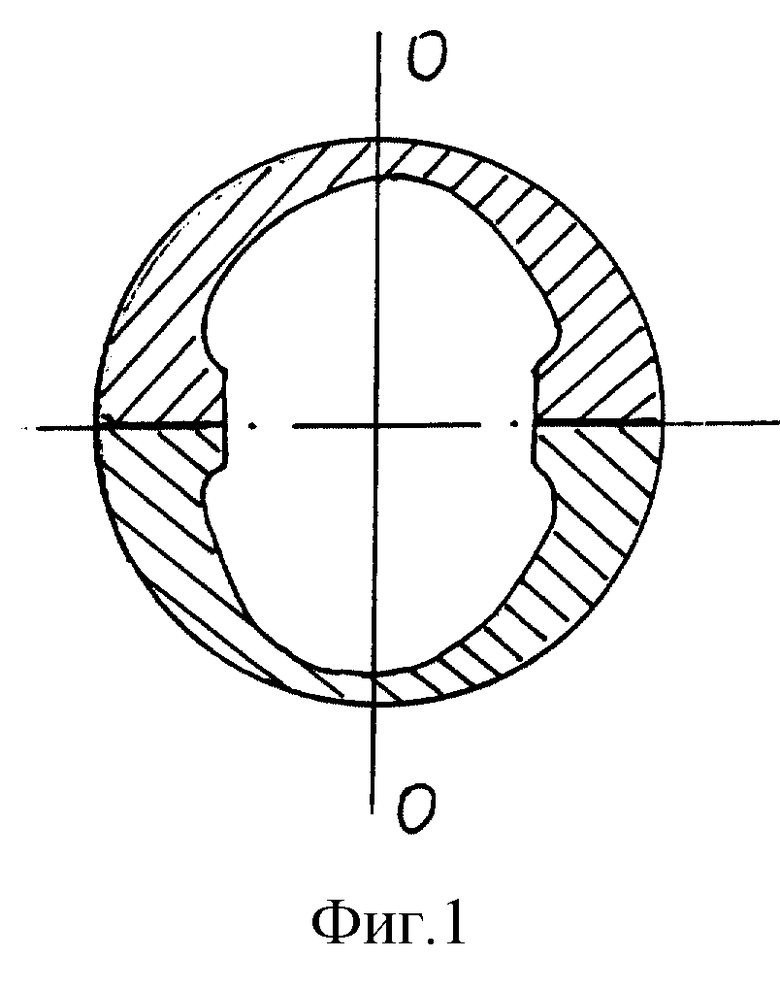
| Малеев П.И | |||
| Новые типы гироскопов | |||
| - Л.: Судостроение, 1971, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| СТАТОР СФЕРИЧЕСКОГО МАГНИТНОГО ПОДВЕСА | 1992 |
|
RU2069313C1 |
| US 3906804, 23.09.1975 | |||
| СПОСОБ ПОЛУЧЕНИЯ РЕДКИХ ТУГОПЛАВКИХ МЕТАЛЛОВ, КРЕМНИЯ И ИХ СОЕДИНЕНИЙ | 1999 |
|
RU2153016C1 |

