1
Изобретение относится к автомати ке и приборостроению и может быть ипользовано в системах управления роботами-манипуляторами, а также в индикаторных комплексах радиоэлектронной аппаратуры.
Известны устройства слежения и вьщачи координат, в которых датчики вькодных координат приводятся в действие сферической головкой, которую можно поворачивать в любом. направлении Ц . Независимыми фрикционньали передачг1ми она связана с датчиками выходных координат.
Недостатком такого устройства является малая скорость управления да1;чиками выходных координат.
Наиболее близким по технической сущности к даннс лу изобретению является устройство содержащее орган движения ручки ввода координат, кинематически связанный с механизмом передачи движения, который посредством зубчатых колес связан с датчиками вертикальной и. горизонтальной составляющих координатСЙНедостатксм этого устройства является невЕзЮокая точность выработки координат, кроме того, устойчивость работы устройства падает, например,
при работе устройства на неподвижном объекте в условиях вибрации.
Целью изобретения является повышение точности определения и вьздачи координат.
Эго достигается тем,что в предлагаемое устройство для слежения и ввдачи координат введены блоки формирования характеристики магнит0ный гистерезис , входные оси которых кинематически связаны с механизмом передачи движения, а выходные - с соответствующими датчиками выходных координат; кроме того,каж5дый блок воспроизведения характеристики магнитный гистерезис выполнен из механического звена типа люфт и фрикционной муфты необратимого действи.я, входы и вы0ходы которых соответственно кинематически связаны между собой и со входной и выходной осями блока.
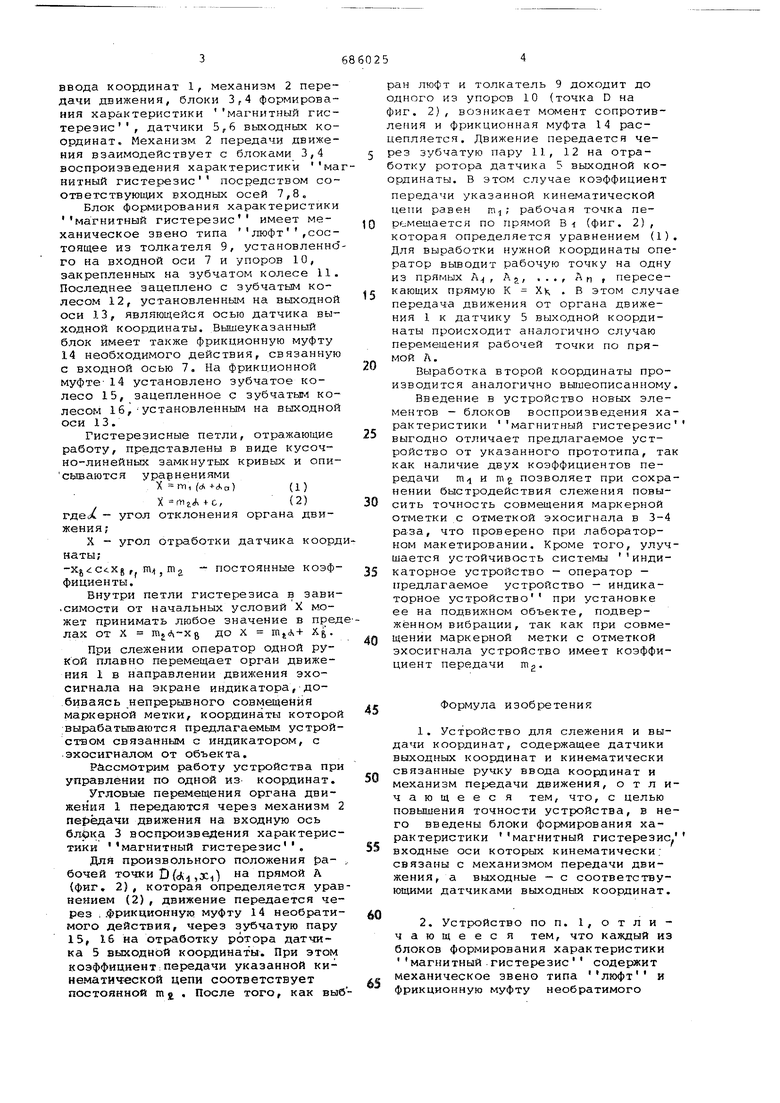
На фиг. 1 представлено предлагаемое устройство для слежения и
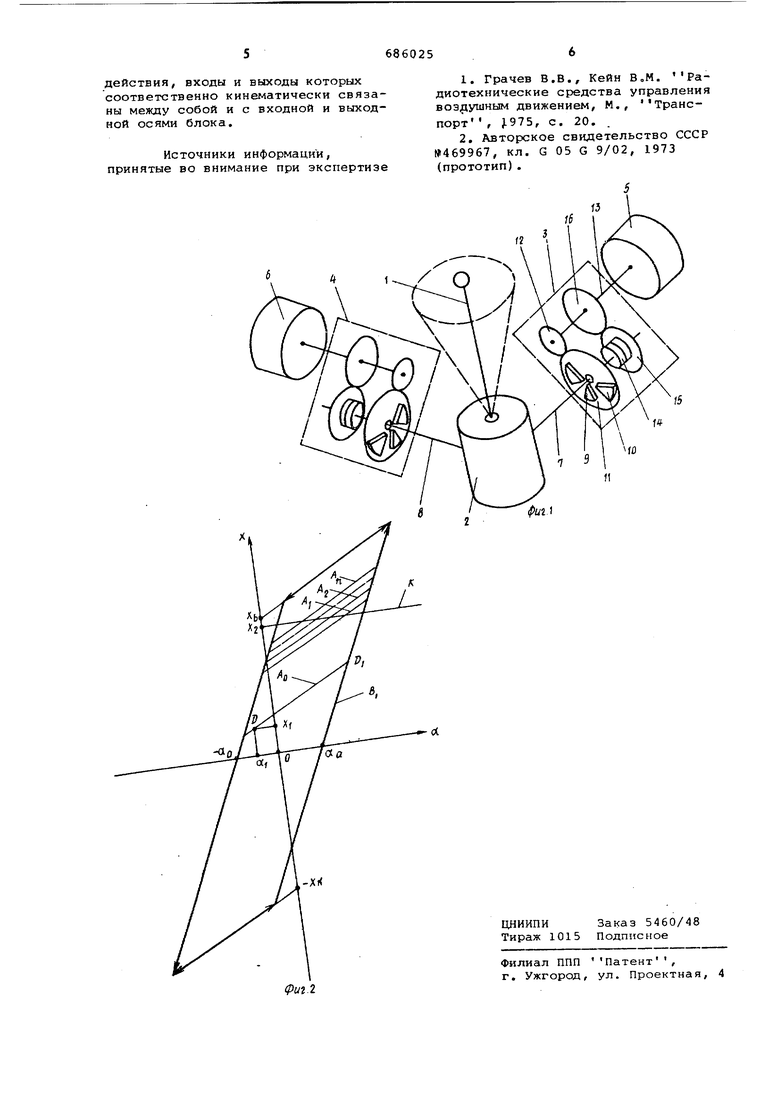
5 выдачи координат; на фиг. 2 - диаграмма работы блока воспроизведения характеристики .магнитный гистерезис .
Устройство содержит кинематичес0ки связанные орган движения - ручку ввода координат 1, механизм 2 передачи движения, блоки 3,4 формирования характеристики магнитный гистерезис, датчики 5,6 выходных координат. Механизм 2 передачи движения взаимодействует с блоками 3,4 воспроизведения характеристики манитный гистерезис посредством соответствуюпдах входных осей 7,8.
Блок формирования характеристики магнитный гистерезис имеет механическое звено типа люфт,состоящее из толкателя 9, установленного на входной оси 7 и упоров 10, закрепленных на зубчатом колесе И. Последнее зацеплено с зубчатым колесом 12, установленным на выходной оси 3.3, являющейся осью датчика выходной координаты. Вышеуказанный блок имеет также фрикционную муфту 14 необходимого действия, связанную с входной осью 7, На фрикционной муфте-14 установлено зубчатое колесо 15, зацепленное с зубчатыг колесом 16,установленным на выходной оси 13.
Гистерезисные петли, отражающие работу, представлены в виде кусочно-линейных замкнутых кривых и описываются уравнениями
Х т, (л +с,а) (1 )
X тгА +с, (2)
где(/ - угол отклонения органа движения;
X - угол отработки датчика коорднаты;
, т, т - постоянные коэффициенты.
Внутри петли гистерезиса в зависимости от начальных условий X может принимать любое значение в предлах от X до х Xg.
При слежении оператор одной рукой плавно перемещает орган движения 1 в направлении движения эхосигнала на экране индикатора,-добиваясь непрерывного совмещений маркерной метки, координаты которой вырабатываются предлагаемым устройством связанным с индикатором, с эхосигналом от объекта,
РЙ.ССМОТРИМ работу устройства при управлении по одной из координат.
Угловые перемещения органа движения 1 передаются через механизм 2 передачи движения на входную ось 3 воспроизведения характеристики магнитный гистерезис .
Для произвольного положения рабочей точки t)(i ,Xi) на прямой А (фиг. 2), которая определяется уравнеиием (2), движение передается через . .фрикционнуг(з муфту 14 необратимого действия, через зубчатую пару 15, 16 на отработку ротора датчика 5 выходной координаты. При этом коэффициент;передачи указанной кинемати №ской цепи соответствует постоянной т . После того, как выбран люфт и толкатель 9 доходит до одного из упоров 10 (точка D на фиг. 2), возникает момент сопротивления и фрикционная муфта 14 расцепляется. Движение передается через зубчатую пару 11, 12 на отработку ротора датчика 5 выходной координаты. В этом случае коэффициент передачи указанной кинематической цепи равен m-i; рабочая точка перемещается по прямой Hi (фиг. 2),
которая определяется уравнением (1). Для выработки нужной координаты оператор выводит рабочую точку на одну из прямых Л , AJ, , . . , АП , пересекающих прямую К Хц .В этом случае передача движения от органа движения 1 к датчику 5 выходной координаты происходит аналогично случаю перемещения рабочей точки по прямой Л.
Выработка второй координаты производится аналогично ВЕЛшеописанному.
Введение в устройство новых элеMetiTOB - блоков воспроизведения характеристики магнитный гистерезис
выгодно отличает предлагаемое устройство от указанного прототипа, так как наличие двух коэффициентов передачи т и mji позволяет при сохранении быстродействия слежения повысить точность совмещения маркерной отметки с отметкой эхосигнала в 3-4 раза, что проверено при лабораторном макетировании. Кроме того, улучшается устойчивость системы индикаторное устройство - оператор - предлагаемое устройство - индикаторное устройство при установке ее на подвижном объекте, подверженном вибрации, так как при совмещении маркерной метки с отметкой эхосигнала устройство имеет коэффициент передачи rrig.
Формула изобретений
1. Устройство для слежения и выдачи координат, содержащее датчики выходных координат и кинематически
связанные ручку ввода координат и
механизм передачи движения, о т л ичающеес я тем, что, с целью повышения точности устройства, в него введены блоки формирования характеристики магнитный гистерезис
входные оси которых кинематически; связаны с механизмом передачи движения, а выходные - с соответствующими датчиками выходных координат.
2. Устройство по п. 1, отличающееся тем, что каждый из блоков формирования характеристики магнитный гистерезис содержит механическое звено типа )т и фрикционную муфту необратимого
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатное полискоростное устройство управления | 1991 |
|
SU1830525A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2176014C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2677425C1 |
| ПРИВОД ЗАБОРНОГО ОРГАНА ЩЕБНЕОЧИСТИТЕЛЬНОЙ МАШИНЫ | 2000 |
|
RU2175943C1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Устройство для привода цепной струговой установки | 1991 |
|
SU1811557A3 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2678397C1 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2789364C1 |
| Предвключенный производитель сжатого воздуха системы кондиционирования воздуха летательного аппарата | 2018 |
|
RU2689927C1 |
| Манипулятор агрегатного типа | 1985 |
|
SU1293014A1 |
