Изобретение относится к области автоматики и телемеханики, а именно к устройствам передачи вращательного движения с различными скоростями, и может быть использовано в роботах-манипуляторах, указателях пеленга, верньерах, устройствах управления летательными аппаратами в
двух плоскостях (по крену и тангажу), оптических устройствах слежения за различными движущимися обьектами, механизмах наведения на цель различного оружия и пр. Целью изобретения является повышение мобильности управления при обеспечении его высокой точности и сохранении
неизменными диапазонов отработки входных и выходных осей.
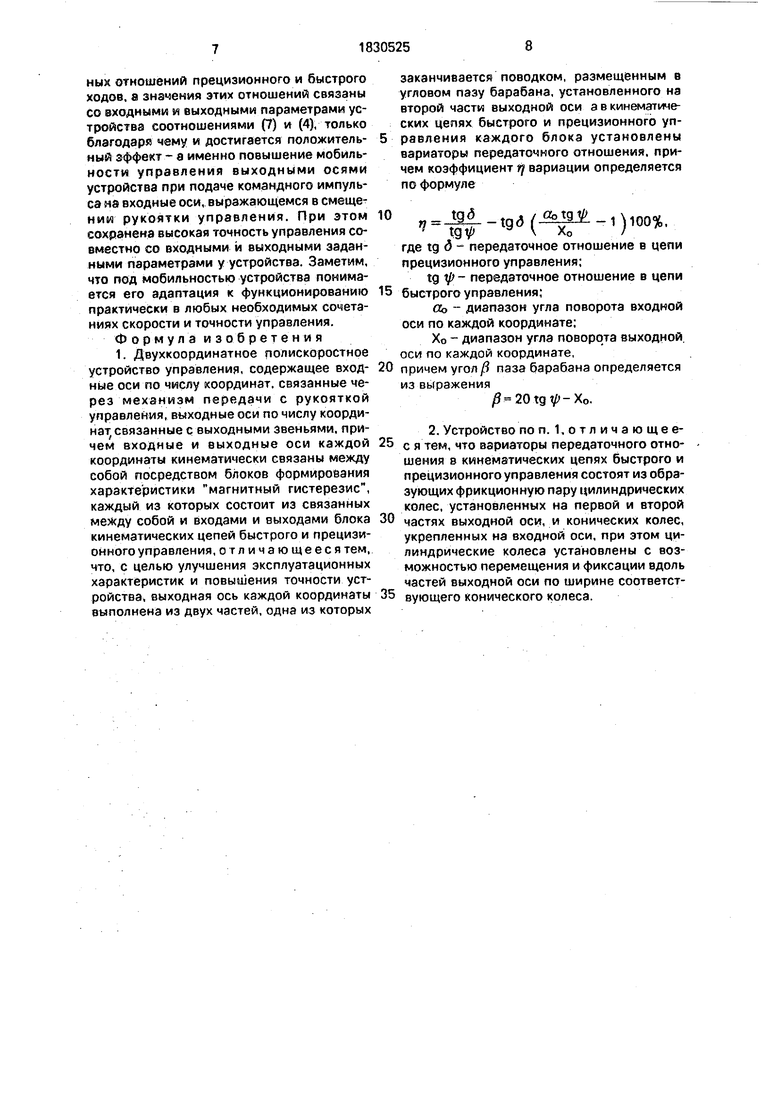
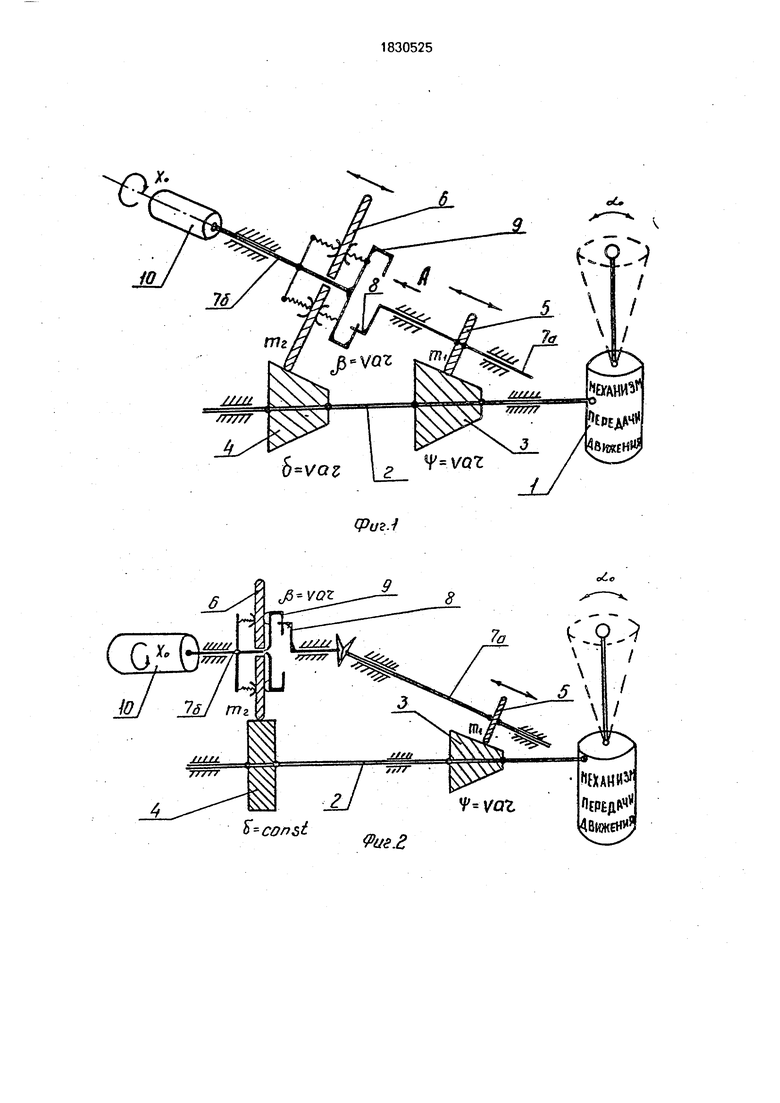
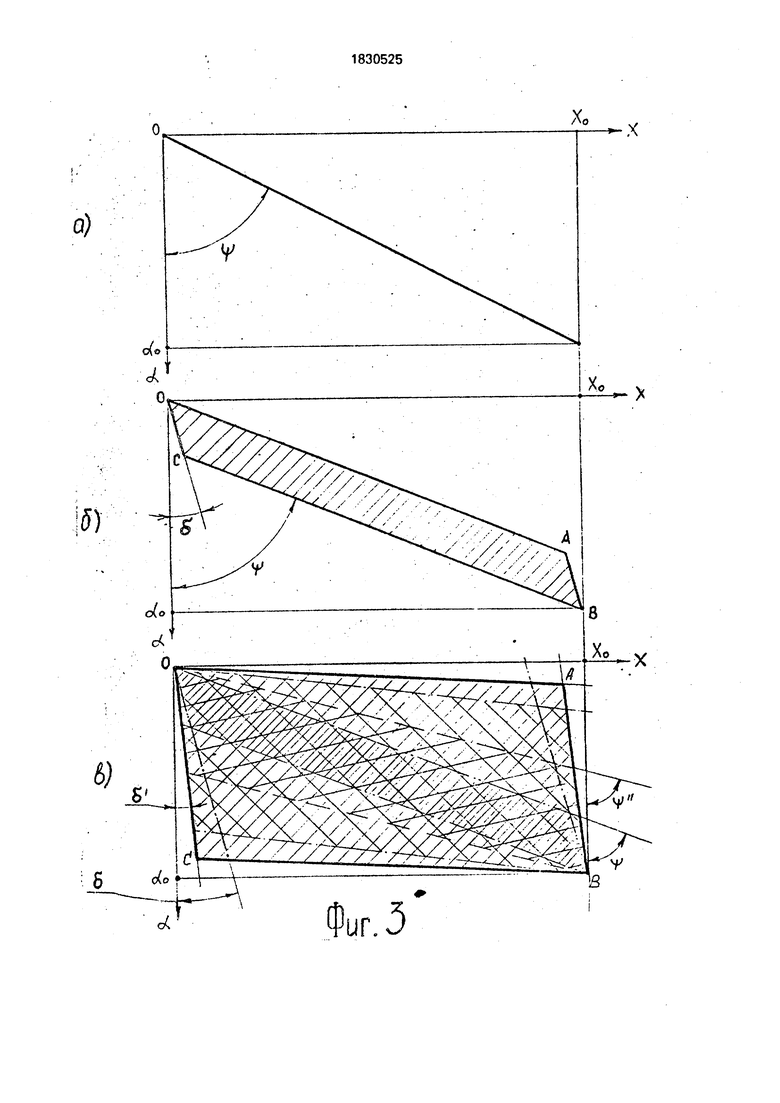
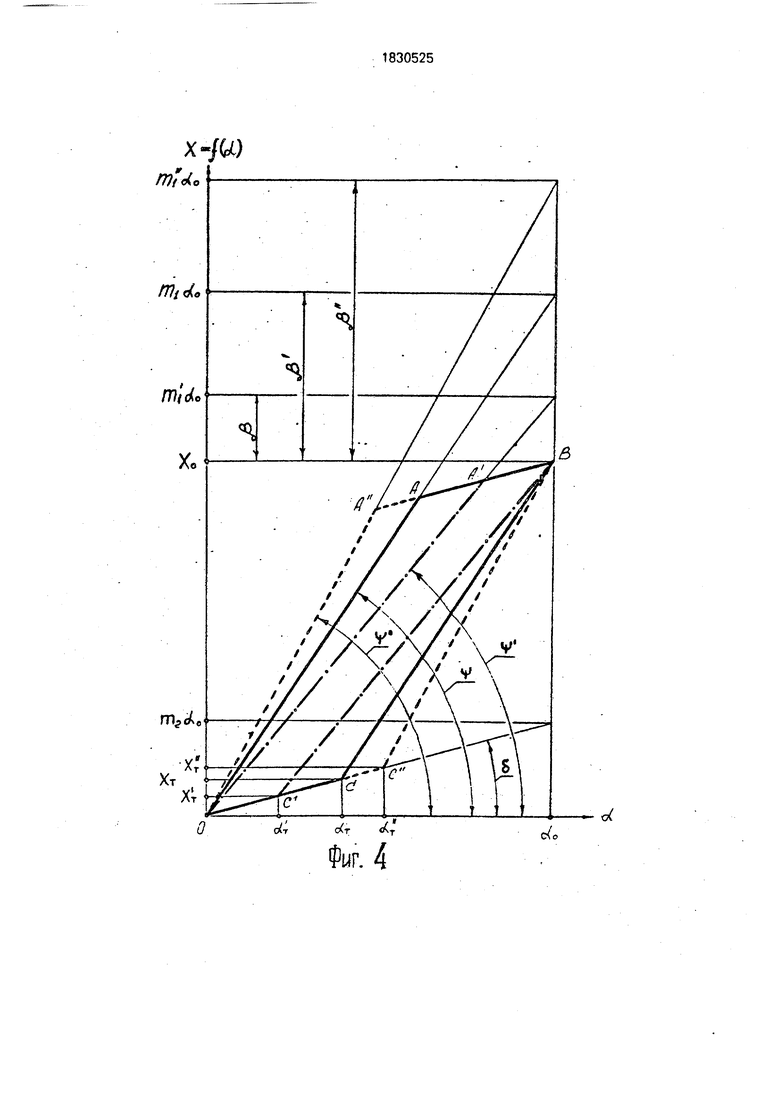
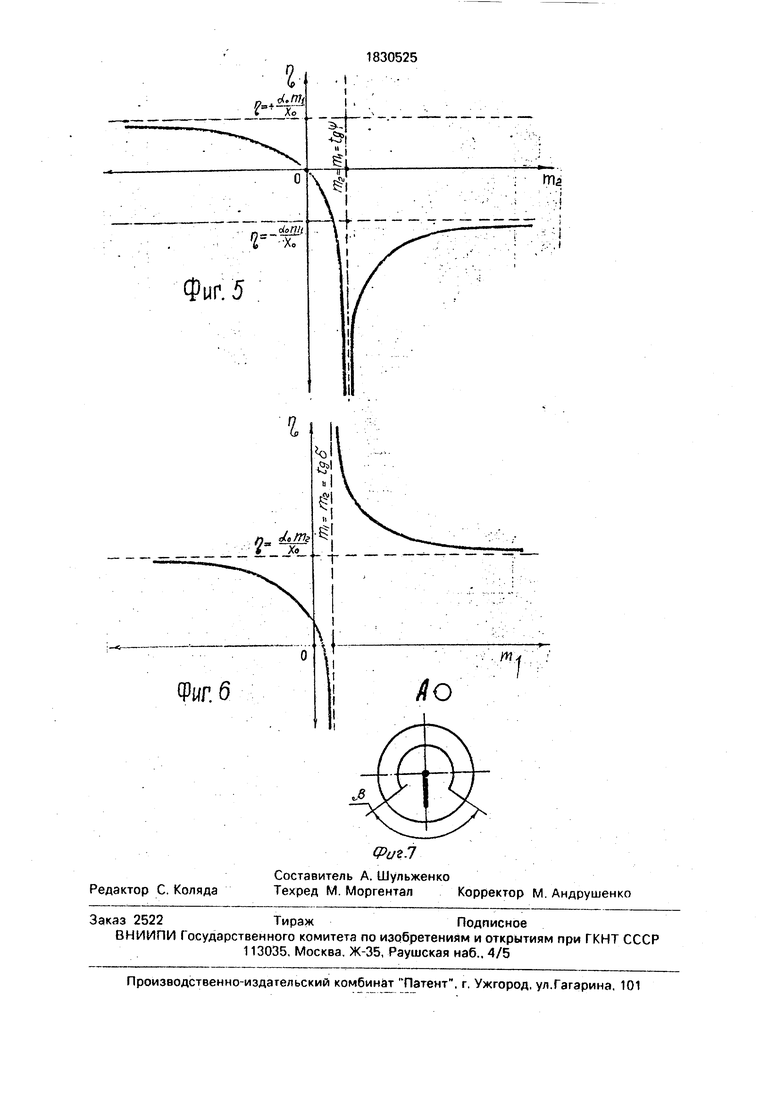
Иллюстрации заявляемого технического решения представлены: фиг. 1 - кинематическая схема устройства с вариаторами в цепях быстрого и прецизионного управлений (вторая координата аналогична); фиг. 2 - кинематическая схема устройства с вариатором в цепи быстрого управления (вторая координата аналогична); фиг, 3 - принцип действия устройств-аналогов (а), прототипа (б) и заявляемого технического решения (в); фиг, 4 - принцип действия заявляемого устройства с вариатором только в цепи быстрого управления; фиг. 5 - график зависимости коэффициента вариации г от передаточного отношения та вариатора цепи прецизионного управления при фиксированном значении передаточного отношения mi в цепи быстрого управления; фиг, 6 - график зависимости коэффициента вариации /от передаточного отношения гщ вариатора цепи быстрого управления при фиксированном значении передаточного отношения та
в цепи прецизионного управления.
Двухкоординатное полискоростное устройство управления содержит механизм передачи движения 1, например, ручку управления летательным аппаратом, свя- занную с установленными на входных осях 2 коническими колесами 3 и 4, С колесами 3, 4 фрикционно взаимодействуют цилиндрические колеса 5 и 6 соответственно. Пары колес 3-5 и 4-6 образуют вариаторы быст- рого и прецизионного управления соответственно. Колесо 5 установлено на первой части 7а выходной оси 7, снабженной образным поводком 8, входящим в угловой паз шириной /3 барабана 9, скрепленного со второй частью 76 выходной оси 7, управляющей блоком 10 (например, ротором сельсина). С возможностью фрикционного проскальзывания относительно барабана 9 на оси 76 расположено колесо 6, составля- ющее пару трения качения с коническим колесом 4. Устройство, показанное на фиг. 2. не имеет вариатора в цепи прецизионного управления, поэтому колесо 4 выполнено цилиндрическим. Диапазон угла отклоне- ния механизма передачи движения 1 (рукоятки) составляет величину «ъ, диапазон угла отработки части 76 выходной оси 7 (ротора блока 10) составляет величину Х0. Передаточное отношение пары колес 3-5 обозначе- но mt. передаточное отношение пары 4-6 обозначено тг. На фиг. 4 mi tg ip, Ш2 - tg д другими словами угол б arctgma угол ty -drctgmi.
Рассмотрим принцип синтеза заявляемого устройства. Весь диапазон Х0 угла отработки выходной оси 76, а тем самым и ротора управляемого блока 10. складывается из углов прецизионной Хт и быстрой Ху отработки. Аналогично, диапазон оъ отклонения рукоятки складывается из углов ат и % (фиг. 4).
Х0 Хт + Ху a, tg д + (аь-сгт) tg V (1)
При движении механизма передачи движения 1 (рукоятки) в диапазоне ат угол поворота поводка 8 полуоси 7а в пазу угловой шириной /8 барабана 9 складывается из самого угла угла поворота барабана 9 на оси 76, составляющего величину От tg д , т.е.
ат tg tgd. «т ( tg - tg д ).
(2) (3)
Данные исходные уравнения получены автором на основании экспериментальных исследований при моделировании на целом ряде макетов-образцов. Подставляя (3) в (1) и разделяя параметры, получим:
Ч
А
(«о Ј
tg у - tg д
)
) -tg.V.
откуда после сокращений и преобразований будем «меть
/ OotgV -Х0.
(4)
Если теперь в выражение (1) подставить значение Хт г Х0, где г - коэффициент вариации, и значение Д из выражения (4), получим
Хо
.). tg V - tg д I Y
После ряда преобразований получим
4
П , v-v« Х0 tgV
(5)
Выражения (4) и (5) образуют систему уравнений
-Хо
«о П + 1 -Ч Х0 tgV Объединяя (4) и (5) в выражении (1) пол(6)
учим
А.
K-tqg-tgd) а после ряда преобразований выражение
, 1дб , ОоЪУ .ч.-ппо, ™ (Хо 1) 100% (7)
являющееся оригинальным и названным автором формулой коэффициента вариации для синтеза и настройки двухкоорди- натного полискоростного устройства управления. Примечательно, что в выражение (7) параметр / (угловой размер паза барабана 9) явно не входит, поскольку /Зне зависит от tg б (параметра, определяющего передаточное отношение вариатора в цепи быстрого управления) и определяется только значениями оъ. Х0. tg ip в соответствии с выражением (4).
Физический смысл коэффициента вариации - это для диапазона Хт прецизионного управления в полном диапазоне Х0 угла отработки выходной оси 76, который принят равным 100%.
Устройство работает следующим образом.
При наклоне рукоятки механизма передачи.движения 1 в пределах телесного угла Оо происходит вращение оси 2 с укрепленными на ней коническими колесами 3 и 4. приводящими во вращение цилиндрические колеса 5 и 6 соответственно. Если поводок 8 оси 7а не взаимодействует с барабаном, движение на ось 76 передается за счет фрикционного контакта колеса 6 с барабаном 9 и осью 76, но при взаимодействии поводка 8 с гранями паза барабана 9, движение на ось 76 передается с колеса 5, а колесо 6 проскальзывает относительно барабана 9 и оси 76. Изменение передаточных отношений mi в паре колес 3-5 и та в паре колес 4-6 обеспечивается осевым смещением (сдвигом) цилиндрических колес 5 и 6 вдоль осей 7а и 76 соответственно и дальнейшей их фиксацией на этих осях в обеспечение передачи крутящего момента с конических колёс на цилиндрические. Изменение углового зазора обеспечивается перенастройкой боковых граней углового паза барабана 9. Таким образом, варьируя передаточные отношения mi, Ш2 и угловой зазор ft в строгом соответствии с выражениями (7) и (4), обеспечивают функционирование устройства в наиболее оптимальном режиме,
удобном индивидуальному оператору или наиболее качественному решению поставленной задачи. Учитывая все вышеизложенное, реальный синтез устройства возможен 5 только в том случае, если выдерживается формула коэффициента вариации (7) и выражение (4) для размера Д
Выгодным отличием заявленного технического решения является высокая МО10 БИЛЬНОСТЬ управления, обусловленная тем, что устройство может функционировать в регулируемом режиме наиболее оптимального сочетания скоростей и диапазонов прецизионного и быстрого управления,
15 чего не обеспечивало ни одно из ранее известных устройств управления по двум координатам. На основании статистического ряда экспериментальных данных можно сделать вывод, что коэффициент вариации
20 наиболее оптимально выбирать в пределах 10-30%. угол отклонения рукоятки по конструктивным соображениям и требованиям инженерной психологии выбирается в пределах 50-70°, угол отработки выходной оси
25 от 300-360° до нескольких полных оборотов, передаточное число rri2 0,2... 1, передаточное число mi 5...10. Для узлов перемещения и фиксации колес 5, 6 на осях 7а и 76 могут использоваться различные
30 приспособления, например сцепные электромагнитные муфты по ГОСТ 21573-76, 21574-76, цанговые или мембранные патроны по ГОСТ 16157-70 и проч. В качестве барабанов, обеспечивающих изменение уг35 левого зазора / относительно поводка 8, моЈут использоваться различного вида ази- мутально перенастраиваемые упоры или выступы.
Таким образом, как это наглядно под40 тверждают диаграммы фиг. 3, заявленное устройство (фиг. Зв) представляет собой новую ступень эволюции двухкоординатных устройств управления, обеспечивающих слежение и командование различного вида
45 объектами независимо по двум координатам.
Другими словами, если в прототипе площадь и форма характеристики магнитный гистерезис была неизменной, эаморожен50 ной величиной, то в заявленном устройстве удалось синтезировать т.н. плавающий магнитный гистерезис, т.е. в идеале форма и площадь характеристики может быть выбрана прямоугольника со сторонами
55 ОХо, Ojr-fo.
В свою очередь, плавающий магнитный гистерезис стал возможным благодаря тому, что в блоки формирования этой характеристики введены вариаторы передаточных отношений прецизионного и быстрого ходов, а значения этих отношений связаны со входными и выходными параметрами устройства соотношениями (7) и (4), только благодаря чему и достигается положительный эффект - а именно повышение мобильности управления выходными осями устройства при подаче командного импульса на входные оси, выражающемся в смеще- ним рукоятки управления. При этом сохранена высокая точность управления совместно со входными и выходными заданными параметрами у устройства. Заметим, что под мобильностью устройства понимается его адаптация к функционированию практически в любых необходимых сочетаниях скорости и точности управления. Формула из об р е т е н и я 1. Двухкоординатное полискоростное устройство управления, содержащее входные оси по числу координат, связанные через механизм передачи с рукояткой управления, выходные оси по числу координат связанные с выходными звеньями, причем входные и выходные оси каждой координаты кинематически связаны между собой посредством блоков формирования характеристики магнитный гистерезис, каждый из которых состоит из связанных между собой и входами и выходами блока кинематических цепей быстрого и прецизионного управления, отличающееся тем, что, с целью улучшения эксплуатационных характеристик и повышения точности устройства, выходная ось каждой координаты выполнена из двух частей, одна из которых
заканчивается поводком, размещенным в угловом пазу барабана, установленного на второй части выходной оси а в кинематических цепях быстрого и прецизионного уп- равления каждого блока установлены вариаторы передаточного отношения, причем коэффициент ц вариации определяется по формуле
- t9V
tg(()100%,
где tg д - передаточное отношение в цепи прецизионного управления;
tg V передаточное отношение в цепи быстрого управления;
Оо - диапазон угла поворота входной оси по каждой координате;
Х0 - диапазон угла поворота выходной. оси по каждой координате, причем угол/ паза барабана определяется из выражения
.
2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что вариаторы передаточного отношения в кинематических цепях быстрого и прецизионного управления состоят из образующих фрикционную пару цилиндрических колес, установленных на первой и второй частях выходной оси, и конических колес, укрепленных на входной оси, при этом цилиндрические колеса установлены с возможностью перемещения и фиксации вдоль частей выходной оси по ширине соответст
вующего конического колеса.
Ju
Ьvaz
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод барабанных летучих ножниц | 1973 |
|
SU524687A1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР НЕФРИКЦИОННОГО ТИПА | 2016 |
|
RU2622178C1 |
| ПРИВОД КООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА С ЧПУ | 1990 |
|
RU2047473C1 |
| Фрикционный вариатор | 1977 |
|
SU752076A1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2001 |
|
RU2204749C1 |
| Фрикционный вариатор | 1982 |
|
SU1203273A1 |
| Устройство управления механизмом подачи топлива и фрикционным многодисковым вариатором транспортного средства | 1987 |
|
SU1449379A1 |
| Устройство для прецизионной намотки нитевидного материала | 1989 |
|
SU1736887A1 |
| Двухрежимная трансмиссия транспортного средства | 1989 |
|
SU1708669A1 |
Изрбретение относится к области автоматики и телемеханики, а именно к устройствам передачи вращательного движения с различными скоростями, и может быть использовано в роботах-манипуляторах, указателях пеленга, верньерах, устройствах управления летательными аппаратами в двух плоскостях, оптических устройствах слежения за различными движущимися объектами, механизмах наведения на цель различного оружия и т.п. Цель изобретения - улучшение эксплуатационных характеристик и повышение точности устройства. Двухкоординатное полискоростное устройство управления содержит пару входных осей и пару выходных осей, кинематически связанных посредством блоков формирования характеристики магнитный гистерезис, состоящих из кинематических цепей быстрого и прецизионного управления. Новым в устройстве является то, что блоки фор- мирования характеристики типа магнитный гистерезис снабжены вариаторами передаточного отношения кинематических цепей быстрого и прецизионного управления, коэффициент 0которых связан с кинетическими параметрами устройства управления приведенного соотношением. Кроме того, вариаторы составлены образующими фрикционную пару цилиндрическими колесами, установленными на выходной оси, и коническими колесами, укрепленными на входной оси, а выходная ось выполнена из двух частей, одна из которых заканчивается Г-образным поводком, находящимся в угловом пазу барабана, выполненного на второй части выходной оси, при этом угол паза / оъ tg ty - Х0 , а цилиндрические колеса имеют возможность перемещения и фиксации вдоль выходной оси по ширине ответного конического колеса. 1 з.п. ф-лы, 7 ил. (Л С со СА О (Л ю ел
&-const
Фиг.1
HfXAHII П№ЈД
Движет
x-/W
/77/об
mid
I
4}
ЛьГПг
Хо
§
т
VФШ1. 6
т:
До
| Устройство для слежения и выдачи координат | 1973 |
|
SU469967A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для слежения и выдачи координат | 1978 |
|
SU686025A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
