узел нормирования нелинейности типа Люфт 4, образующие сигнгшизатор знака производной, причем первое и второе сопла элемента 3 соединены соответственно с соплами элементо1в 1 и 2, а обе проточные камеры с атмосферой 4iSpe3 дроссель 5, и выходным каналом Р вых, который может быть подключен, например, к нормирующему усилителю 6, содержащему одномембранный элемент 7, дроссель 8 и реле 9, причем глухая камера элемента 7 соединена с входом усилит ля б, соединенным с проточными камерами элемента 3, проточная камера элемента 7 соединена с атмосферой, а сопло - через дроссель 8 с источником питания и через реле 9 с выходом усилителя Входы формирователя соединены: вход регулируемой величины с проточной камерой элемента 1, с глухой камерой элемента 2 и с глухими 1самерами элемента 3, причем с первой из них непосредственно, а с второй через узел 4 вход Pi - с глухой камерой элолента; 1 и с проточной камерой элемента 2, Узел 4 состоит из параллельно соеди ненных элементов запоминания максимума 10 и минимума 11, вьаполненных каждый на одномембранном элементе с пружиной в глухой камере, и подклю ченной к их выходам пневмоемкости 1 причем входы и выходы элементов 10 и 11 соединены соответственно с вхо дом и выходом узла 4. Формирователь работает следующим образом. Сигнал датчика регулируемой вели ны йодается на вход PI , а сигнал с задатчика уставки регулируемой вели чины - на вход PJ. . Регулирумщее уст ройство формирует закон регулирован и выдает сигнал на исполнительный орган системы регулирования в зависимости от значений Р и Р и своей структуры, определяемой состоянием узла переключения, которое, в свою очередь, определпется сигналом поступающим на вход узла переключения с выхода формирователя. Функционирование формирователя определяет ся только значениями сигналов Р и Pj. - - - - .. V Формирователь функции переключен формирует на своем выходе сигн в зависимости от отключ ения регулируемой величины Sa установленные границы зоны нечувствительности и от знака производной регулйруемэй величины следующим образом. Если регулируемая величина Р от клонилась от своего заданного значе ния Pj не более, чем на Л - заданну пружинами элементов 1 и 2 величину зоны нечувствительности, то есть, если PJ Pi + u, то на мембр нах элементов 1 и 2 имеют место неравенства Pj + и PI + л 7 PI соответственно, в соответствии с чем. контакты KI и Kj этих элементов сказываются разомкнутыми (К 0, К 0). Если регулируемая величина Р выила за верхнюю границу зоны нечувствительности, то есть если Р Pj +Д , то на мембранах элементов 1 и 2 имеют место неравенства PI Р + Д и 1 + в соответствии с чем контакт Kj элемента 1 замкнется{К4 1), а контакт к элемента 2 останется разомкнутым (Kj 0); если в дальнейшем величина Р вновь уменьшится так, что Р Р +й fio контакт К вновь разомкнется. , Если регулируемая величина Pt вышла за нижнюю границу зоны нечувствитальности, то есть если Р Р, - А , то на мембранах элементов 1 и 2 имеют место неравенства Pj PZ + Д и PJ Р, + Д соответственно; контакт Kj элемента 1 останется разомкнутым (KY 0), а контакт K элемента 2 замыкается (К 1) ; если в дальнейшем величина Р, вновь возрастает, так, что Р Р| - U , то контакт Kj. вновь разомкнется. Состояние элемента 3 определяется разностью давлени й.в его глухих камерах/ которая, в свою очередь, задается узлом 4, реализующим Фуикцйю вида:i-« Р. +1 Pj( - .(+ при cf - гд где величина установленной зоны нелинейности в узле 4, которая берется равной или большей, дифференциала срабатывания элемента 3; Р - значение дaвJ:Ieния на выходе узла 4; Р - значение давления, запоминаемого на выходе узла 4 при смеие направления изменения давления Рд на входе узла 4. Если регулируемая величина возрасdPiтает, то есть, если О, то Р. - Рд в соответствии с первым управлением функции, реализуемой узлом 4), и первый контакт Kj элемента 3 замыкается, а второй К размыкается (Кз 1, Ki, 0). Если реализуемая величина уменьшается, то есть, если ctP,/dt О, то Рд - (в соответствии с вторым уравнением функции, реализуемой узлом 4), и первый контакт KJ элемента 3 размыкается, а второй контакт К, замлкаётся .(Kj О, K, 1). ЕСЛИ же регулируемая величина сменив направление своего движения, начала изменяться в новом направлении, то на участке d движения в новом направлении от точ ки реверса разность давлений в глу камерах элемента 3 будет сохранять свой знак и элемент 3 будет находи ся в прежнем положении, а в момент когда /PJ РА / О давления в глу хих камерах элемента 3 сравняются (в соответствии с третьим уравнением функции, реализуемой узлом 4), элемент 3 переключается и состояния контактов Кд и К меняются на обрат ные. Таким образом, величинаДопределяет зону нечувствительности регулятора к перемене направления движения. Далее, давление на дроссел 5 является результатом вэаимодейстВИЯ контактов всех трех сигнализато ров это давление равно атмосферном от комбинации состояния контактов ,Kj, Кд, Кз и Кц , которая определяет ся логическим уравнением Рвы11: Ki-Кз + Ка-Ч. Это уравнение определяет закон функционирования формирователя и, однако сигиал Р не может быть пОдан непосредственно на выход формирователя, так как он не нормализо ван по уровню и не дискретен. Следовательно,, давление 1 долж но быть соответствующим образом пре образовано. С этой целью в состав формирователя введен нормирующий усилитель 6, состоящий из последова тельно соединенных усилителя давления с большим коэффициентом усиления, образованного элементом 7 и дросселем 8, и преобразователя непрерывного сигнала в релейный, выпол ненного на реле 9, которое включено по логической схеме Да. Работа усилителя 6 очевидна и специальных пояснений не требуется. Следует отметить при этом, что, когда давление равно атмосферному, то давление на выходе усилителя 6 тоже равно атмосферному, а Йы PI bwT г ° давление Выж равно давлению питания, то есть- в логическом отношении усилитель 6 является повторителем, так что , РЬИ«Г Следовательно 6« t Kj + KjKi,. Подставляя сюда вышеопределенные значения; при Р, РО - Кз О, К 1 получим закон функционирования формирователя в виде при /Р - Pi / А при Р PJ ч-А и CLPi/fllt 0 при PI «. Р - Д и dPi О при р ,Pi +д и dPi/«а о Q при РО -4 и dfJdt О, то можно интерпретировать следующим образом, если регулируемая величина удаляется от заданного значения, то на выходе формирователя сигнал равен нулю, пока регулируемая величина отклонилась от зашания менее, чем на Д , и становится равным единице в дальнейшем своем движении в том же направлении; если регулируемая величина приближается к заданному значению, то на выходе формирователя сигнал равен единице, пока регулируемая величина отклонилась от своего значения в точке реверса менее. чемнасГ, и становится равном нулю в дгшьнейшем своем движении в том же направлении. Узел 4 работает следующим образом. Пусть в исходном состоянии давление PJ на входе узла 4 ргшно давлению Рц на его выходе. Тогда на мембране элементов 10 и 11 имеют место неравенства Pj РЛ + сГн Р + сГ РЯ соответственно; при этом контакт в каждом из этих элементов разомкнут, и давление на выходе оказывается замкнутым в глухом объеме, то есть Рд Рд при Р,| РЛ Если в дальнейшем давление Р будет произвольным образом меняться в пределах «tfOT своего значения в исходном состоянии, то неравенства Рд Чйи PI +d РА на мембранах элементов 10 и 11 сохраняются и контакт в обоих элементах останется разомкнутым, так что Р - (Г Рд Рд + «f при Рд РО .. 2) Если давление Р, , возрастая отклонится от своего значения в исходном состоянии более, чем на Г, то на: мембранах элементов 10 и 11 будут выполняться неравенства Р Рд + «Г и PJ + d Рд , при этом контакт элемента 10 переходит в проводящее состояние, а контакт элемента 11 остается разомкнутьм; дгшление Рд начинает возрастать; как только скорость его изменения сравняется со скоростью изменения давления Р|, переходный процесс закончится при некотором определенном значении сопротивления контакта в элементе 10 и при разности давлений на выходе и входе практически равной величине б, так что Рд « Р - (f при ,/di ) Это равенство в дальнейшем будет сохраняться при любых значениях скоростй изменения давления Pj в диапазоне от нуля до некоторого максималь ного значения, соответствующего такому положению мембраны относительно сопла в элементе 10, при котором контакт элемента имеет минимально возможное сопротивление, то есть контакт полностью открыт, ЕСЛИ давление Р/ уменьшаясь, от клонится от своего значения в исходном состоянии более чем на сГ, то на мембране элемента 11 возникает небаланс давления Р +tf Р , а на мембране элемента 10 сохранится неравенство PJ Р + при этом кб такт элемента 11 переходит в проводящее состояние, а контакт элемента 10 остается разомкнутым; давление Pjf начинает уменьшаться, как только скорость эго изменения сравняется со скоростью изменения-давления Р , переходный процесс заканчивается при некотором определенном значении сопротивления контакта в элементе 11 и при разности давлений на йыходе и входе практически равной величине , так что Р + сГ при I Это равенство в дальнейшем будет сохраняться при любых значениях скорости изменения давления PJ в диапазо не от нуля до некоторого максимально значения, соответствующего такому положению мембраны относительно сопла в элементе 11, при котором контак элемента имеет минимально возможное сопротивление. Еслииз состояния, определяемого уравнением (3), давление Р, изменит направление своего изменения и начнет уменьшаться, то на мембране элемента 10 возникнет небаланс давлений PJ « Рд + cTf а на мембране элемента 11 сохранится неравенство Р + б Р/ при этом контакт элемента 10 размыка ется, а контакт элемента 11 остаетс разомкнутым; давление Рд перестает изменяться и становится науровне, которого оно достигло в момент размыкания контакта элемента 10; так ка к ра эмыканйё контакта .элёмёнта Тб dP-f происходит в момент, когда - 0 ТО последующее уменьшение давления F происходит уже при разомкнутом контакте элемента 10, так как давле ние РЛ при своем изменении повторя ет (со сдвигом) изменение давления Р , то, следовательно, в момент ра мыкания контакта элемента 10 давле ние Pyj также имело нулевую скорость, а до этого момента также монотонно возрастало; поэтому в момен рад№ канйя контакта, элемента 10 дав ление Р остановилось на уровнёу р& ном максимальному значению, достигнутому при движении вверх до момента остановки, итак Рд .P РНОКС дальнейшем, когда давление Р будет уменьшаться, схема переходит в сосгояние, описываемое уравнением (2). Аналогично, из состояния, определяемого Уравнением (4), при перемене направления изменения давления-р, схема переходит в состояние, описываемое уравнением (2), где под Р подразумевается значение минимума давления Рд , достигнуто при движении вниз. Таким образом, при циклическом изменении давления Р на входе узла 4 давление Р, на его выходе изменяется циклически, реализуя уравнения (2), (3), (4) и их взаимные переходы. Как известно, система этих уравнений (то есть система (1)) является аналитическим выражением нелинейности типа Люфт. Точность работы предлагаемой схемы выше, так как сигнализатор знака производной в ней может работать в широком диапазоне изменения скоростей регулируемой величины, .а погрешность определения знака производной фиксиров.ана и определяется чувствительностью трехмембранного элемента сравнения, входящего в состав сигнализатора. В предлагаемой схеме точность поддерживания заданной зоны чувствительности зависит от давления и стабильности задаваемого пружиной смещения, в то время как в регуляторе -.прототипе кроме этих факторов на стабильность установленной зоны оказывает влияние состояние дросселей, входящих в состав задатчиков, и колебания давления питания, так что стабильность задания зоны нечувствительности в предлагаемой схеме вьше. Более высокая точность формирования функции переключения улучшает технико-экономические пока.затели системы регулирования, в которую входит предлагаемый регулятор, и расширяет область применения таких регуляторов. В формирователе функции переключения предлагаемого регулятора имеется возможность создавать зону нечувствительности при смене направления изменения регулируемой величины (путем соответствующих настроек в устройстве для реализации нелинейности типа Люфт), что позволяет, вопервых, избежать переключений регулятора при флуктуаци регулируемой величины и тем самым повысить срок службы его, и, во-вторых, может служить дополнительной составляющей закона регулирования и тем самым улучтааить качество регулирования в соответствующих случаях и расширить область применений предлагаемого формирователя.
Формула изобретения
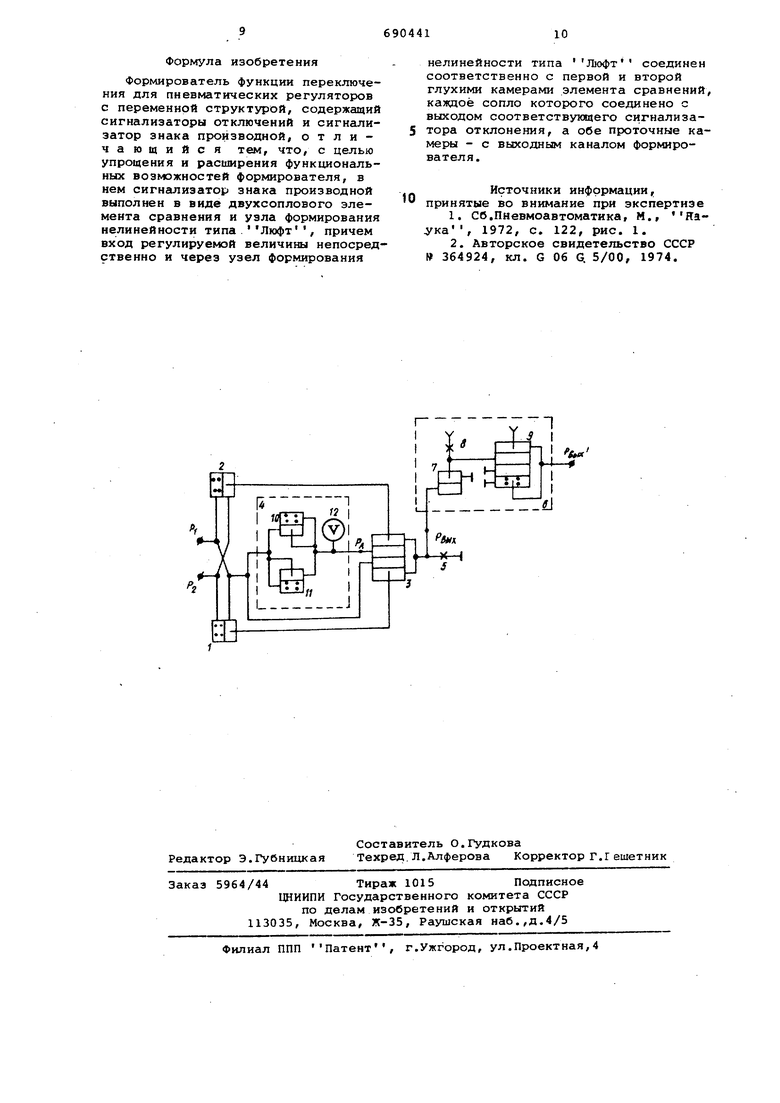
Формирователь функции переключения для пневматических регуляторов с переменной структурой, содержащий сигнализаторы отключений и сигнализатор знака производной, отличающийся тем, что, с целью упрощения и расширения функциональных возможностей формирователя, в нем сигнализатор знака производной выполнен в виде двухсоплового элемента сравнения и узла формирования нелинейности типа Люфт, причем вход регулируемой величины непосредственно и через узел формирования
-. ,:
- f :,& .-..-j ;,-
690441
10
нелинейности типа Люфт соединен соответственно с Первой и второй глухими камерами .элемента сравнений, каждое сопло которого соединено с выходом соответствухяцего сигнализатора отклонения, а обе проточные камеры - с выходным каналом формирователя.
Источники информации, принятые во внимание при экспертизе
1.Сб.Пневмоавтоматика/ М., Яаука, 1972, с. 122, рис. 1.
2.Авторское свидетельство СССР 364924, кл. G Об G 5/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство для моделирования нелинейности | 1976 |
|
SU643895A1 |
| Пневматический регулятор | 1980 |
|
SU868702A1 |
| Пневматический регулятор с настраиваемой зоной нечувствительности | 1976 |
|
SU651307A1 |
| Плотномер | 1982 |
|
SU1099243A1 |
| Пневматический регулятор | 1981 |
|
SU968787A1 |
| ПНЕВМАТИЧЕСКИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1971 |
|
SU318932A1 |
| Пневматическое множительное устройство | 1977 |
|
SU636625A1 |
| Пневматическое устройство контроля режима работы пневмопривода горной машины | 1974 |
|
SU612020A1 |
| Пневматический двухпозиционный регулятор | 1983 |
|
SU1128222A1 |
| Пневматический шаговый экстремальный регулятор | 1975 |
|
SU651313A2 |
