(54) ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1981 |
|
SU968787A1 |
| Пневматическое устройство для формирования функции переключения | 1980 |
|
SU860085A1 |
| Пневматическое устройство для моделирования нелинейных функций | 1976 |
|
SU630632A1 |
| Формирователь вункции переключения для пневматических регуляторов с переменной структурой | 1976 |
|
SU690441A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНОГО СИГНАЛА | 1992 |
|
RU2050574C1 |
| Пневматическое устройство выбора максимума | 1982 |
|
SU1084818A2 |
| Пневматический трехпозиционный регулятор | 1976 |
|
SU652531A1 |
| Пневматический двухпозиционный регулятор с зоной возврата | 1981 |
|
SU996993A1 |
| Пневматический пропорциональныйРЕгуляТОР | 1979 |
|
SU851336A1 |
| ПНЕВМАТИЧЕСКИЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1985 |
|
SU1289244A1 |
1
Изобретение относится к приборостроению, а именно к пневматическим регуляторам.
Известен пневматический регулятор, содержащий сигнализаторы границ зоны нечувствительности и формирователь выходного сигнала 1.
В известном регуляторе реализуется трехпозиционный закон регулирования, причем уровни сигналов всех трех позиций настраиваются вручную и в процессе регулирования остаются неизменными, что ограничивает область его применения объектами, подверженными незначительным возмущениям.
Наиболее близок к предлагаемому по технической сущности регулятор, содержащий два одномембранных элемента с пружиной, постоянный и переменный дроссели, емкость и усилитель, причем проточная камера первого одномембранного элемента с пружиной через постоянный дроссель соединена с каналом питания, вход,усилителя через последовательномежду собой соединенные переменный дроссель и емкость соединен- с глухими камерами обоих одномембранных элементов с пружиной, а выход его - с выходным каналом регулятора. В указанном регуляторе уровни сигналов всех трех позиций меняются автоматически. в. зависимости от времени нахождения регулируемой величины вне пределов заданной зоны нечувствительности, т.е. в законе регулирования имеется интегральная составляющая, что позволяет применять такой регулятор на объектах, подверженных большим воз10мущениям, максимально уменьшив при этом разность между уровнями сигналов крайних позиций и, следовательно, величину автоколебаний в установившемся режиме 2 .
15
Однако, как известно, ввод интеграла в закон регулирования уменьшает запас устойчивости системы регулирования, поскольку интегральная составляющая в выхрдком сигнале ре20гулятора отстает по фазе от входного сигнала. Угол отставания равен 90, что позволяет обеспечить удовлетворительйое качество регулирования лишь в системах, где возмущающие
25 воздействия меняются во времени медленно .
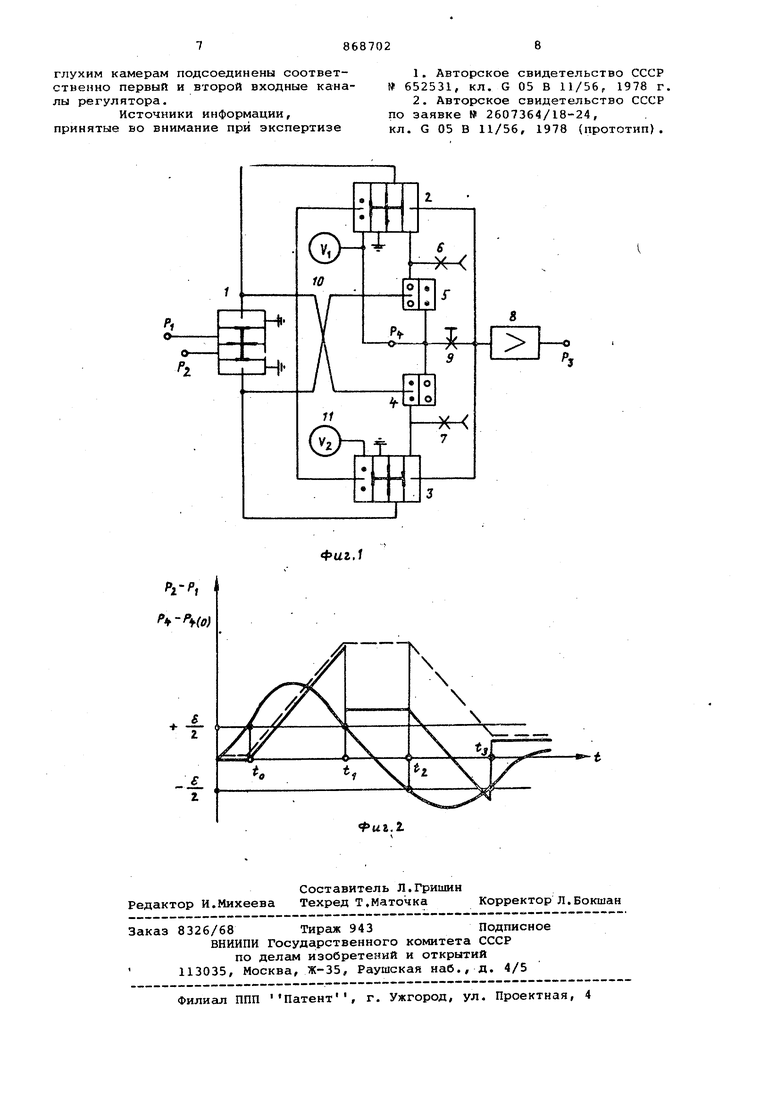
Цель изобретения - улучшение динамических характеристик трехпозицирнного регулятора, содержащего интег30ральную составляющую в законе регули рования. Поставленная цель достигается тем что в регулятор, содержащий два одномембранных элемента с пружиной, постоянный и переменный дроссели, ем кость и усилитель, причем проточная камера первого одномембранного элеме та с пружиной через постоянный дроссель соединена с каналом питания, вход усилителя через последовательно между собой соединенные переменный дроссель и емкость соединен с глухими камерами обоих одномембранйых эле ментов с лружиной, а выход его - с выходным каналом регулятора, введены второй постоянный дроссель, вторая . ёмкость, трехмембранный элемент срав нения и два двухконтактных клапана, причем: через второй дроссель проточ ная камера второго одномембранного элемента с пружиной соединена с каналом питания; через нормально разомкнутый контакт каждого из клапанов проточная камера соответствующего одномембранного элемента с пружиной соединена со входом усилителя; через последовательно между собой соединенные нормально замкнутые контакты клапанов вторая емкость соединена с первой; через первый (второй) контакт трехмембранного элемента сравнения камера управления первого (второго) клапана и сопло второго (первого) одномембранного з лемента с пружиной соединены с атмосферой, а к его первой и второй глухим камерам соединены с атмосферой, а к его первой и второй глухим камерам подсоединены соответственно первый и второй входные каналы регу лятора . На фиг. 1 представлена принципиальная схема предлагаемого регулятора; на фиг, 2 - график формирован сигнала средней позиции регулятора. Входные каналы Р и Р2 регулятор соединены с первой и второй камерам ;управления элемента 1 сравнения; че рез первый (второй) контакт которог камера управления двухконтактного клапана 2 (3) и сопло одномембранно элемента 4(5) с пружиной соединены с атмосферой; проточная камера элемента 5(4, через дроссель 6(7) соединена с каналом питания, а через нормально разомкнутый контакт клапа на 2(3) - со входом уси 1ителя 8, че рез переменный дроссель 9 соединенного с глухими камерами элементов 5 и 4 и с емкостью 10, которая через нормально замкнутые и последователь но включенные Контакты клапанов 2 и 3 соединяется с емкостью 11 выход усилителя 8 соединен с выходным каналом Р, регулятора. Регулятор работает следующим образом. Пусть задание и регулируемая величина подаются в каналы Р и Р соответственно; пусть также на элементе 1 установлен дифференциал срабатывания , а на элементах 5 и 4 установлены положительное и отрицательное смещения соответственно, абсоЛ19тные величины которых взяты одинаковыми и обозначены через Л . Позиционная составляющая закона регулирования формируется следующим образом. Если то оба контакта элемента 1 замкнуты, камеры управления клапанов 2 и 3 через эти контакты соединены с атмосСерой и оба клапана находятся в исходном положении. При этом вход усилителя 8, соединен через дроссель 9 с емкостями 10 и 11 и непосредственно с глухими камерами элементов 5 и 4, все эти элементы образуют замкнутый объем, в котором устанавливается давление Pi , равное давлению в емкости 10. Следовательно, Р Рд , что соответствует, сигналу среднай позиции. , то первый контакт элемента 1 разомкнут, а второй замкнут камера управления в клапане 2 соединена с каналом питания через контакт элемента 4 и дроссель 7, а в клапане 3 - с атмосферой, так что первый из них находится в переключенном, а второй в исходном положениях. При этом вход усилителя 8 через замкнутый контакт клапана 2 соединен с проточной камерой элемента 5, образующего совместно с дросселем 6 схему повторителя с положительным смещением;следовательно, РЭ соответствует сигналу верхней позиции. Если Р - f то первый контакт элемента 1 замкнут, а второй разомкнут; камера управления в клапане 2 соединена с атмосферой, а в клапане 3 - с каналом питания через контакт элемента 5 и дроссель 6, так что первый из них находится в исходном, а второй в переключенном положениях. При этом вход усилителя 8 через замкнутый контакт клапана 3 соединен с проточной камерой элемента 4, образующего совместно с дросселем 7 схему повторителя с отрицательньм смещением; следовательно, Р f55-& что соответствует сигналу нижней позиции. Сигнал Рц представляет собой интегральную составляющую закона регулирования и формируется следующим образом. Пусть до момента времени to имеет место неравенство ( тогда в замкнутом объеме, содержащем соединенные между собой емкости io и 11, давление неизменно, т.е. Рд РдСоГ Пусть с момента времени to выполняется неравенство Р - 7-f i.,. тогда емкость 11 отключается от емкости 10 и в ней заполняется давление Р,/о а емкость 10 оказывается подключенной через дроссель 9 к выходу повто рителя с положительным смещением, о разованного элементом 5 и дросселем 6. Этот/повторитель благодаря образовавшейся положительной обратной СВЯЗИ с выхода на вход его через дроссель 6 и емкость 10 превращаетс в интегратор, и вследствие действия этого интегратора давление в емкост 10 начинает расти по закону , 4 4(0)+ Ч-Д-t где к - коэффициент интегрирования определяемый параметрами . емкости 10 и дросселя 9; t - время прошедшее с момента Пусть с момента времени Ц вновь выполняется неравенство /Pg - тогда схема возвращается в состояние, при котором емкости 10 и.11 соединены между собой. В момент их соединения в емкости 10 давление со тавляет ) -о кости II - Р4/О) поэтому результиру щее давление в них после их соедине НИН составляет 4-f 4(l)-P4CO)S.(VtoVy .t где V. .и V - объемы емкостей 10 и 11 соответственно. nocKOJibKy отношениеV |(V., то подключение емкости 11 к емкостз-с 10 в момент входа регулируемой величин в зону нечувствительности вызывает скачкообразное уменьшение приращения сигнала Р , имеющее место на участке t - t, В дальнейшем, пока /Р2. - 15| / J I емкости 11 и 10 остак(тся соединенными между собой, а давление в них Рд РДО) const Пусть в момент времени t возника ет неравенство Р2 § тогда работает интегратором схема, состоящая из элемента 1, дросселей 7 9 и емкости 10|При этом давление в емкости 11 остается неизменным, а в емкости 10 изменяется по закону Р Р4(-{) - ц-1- д с момента времени t вновь выполняется неравенство / Pj - 1 тогда емкости 10 и 11 вновь соединяются между собой и давление в них устанавливается на уровне. Р4(2)).- у;;;уа т.е. снова приращение сигнаша ., имевшее место за время выхода регулируемой величины иэ пре;;елов зоны нечувствительности, скачком уменьшается BV4/() раз. Если положить tj ti to, Vj Ч, и g О, -то в момент Р « gj происходит полный сброс интегрального прираицения, накопленного ял ЛЧПАмя, когда Р 2 Р. а характеристика изменения во времени этого приращения принимает пилообразный вид; в этом случае интегральная составляющая выходного сигнала-регулятора отстает по фазе от входного сигнг ла его примерно на 30. Если же положить V2 О, то характеристика не имеет скачков, что совпадает с законом изменения интегральнойсоставляющей в известном регуляторе, при этом угол отставания равен 90 (на фиг. 2 характеристика для этого случая представлена штриховой кривой). ;ТЬким образом, в предлагаемом регуляторе интегральная составляющая закона регулиоования отстает по фазе на меньший угол от вводного сигнала, чем в известном регуляторе. Благодаря этому в системе регулирования, содержащей предлагаемый регулятор, обеспечивается более высокий запас устойчивости, что создает технико-экономический эффект в виде повышения качества регулирования заданного объекта регулирования и расширения класса допустимых объектов при заданном качестве регулирования. Формула изобретения Пневматический регулятор, содержащий два одномембранкых элемента с пружиной, первый дроссель, переменный дроссель, первую емкость и усилитель, причем проточная камера первого одномембранного элемента с пружиной через первый дроссель соединена с каналом питания, вход усилителя черюз последовательно между собой включенные переменный дроссель и i первую емкость соединен с глухими камерами одномембранных элементов с пружиной, а выход его - с выходным каналом регулятора, отлич ющ и и с я тем, что, с целью улучшения динамических характеристик регулятора, он содержит второй дроссель, через который проточная камера второго одномембранного элемента с пружиной соединена с каналом питания, два двухконтактных клапана, через нормально разомкнутый контакт каждого из которых проточная камера соответствующего одномембранного элемента с пружиной соединена со входом усилителя, вторую емкость, соединенную с первой емкостью через последовательно между собой включенные нормально замкнутые контакты обоих клапанов, и трехмек бранный элемент сравнения, через первый контакт которого камера упра В1ления первого клапана и опло второго одномембранного элеента с пружиной, а через второй конакт - камера управле1;ия второго клаана и сопло первого одномембранного лемента с пружиной соединены с атосферой, а к его первой и второй.
глухим камерам подсоединены соответственно первый и второй входные каналы регулятора.
Источники информации, принятые во внимание при экспертизе
кл. G 05 В 11/56, 1978 (прототип).
