Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для считывания графической информации, и может быть использовано для ввода координат точек черте кей, карт и графиков в ЭВМ.
Известно устройство, содержащее блок определения координат, соединенный с блоком формирования развертки и через элемент И с блоком управления, фотоприемный элемент, выход которого через блок усиления подключен к блоку управления-и к элементу И, анализатор, соединенный с блоком определения- координат и сопряжения 1.
Недостаток этого устройства состоит в его низкой точности.
Наиболее близким техническим решением к предлагаемому является устройство, содержащее блок формирования развертки, подключенный к фотоприемному элементу, соединенному с датчиком положения и с приводом, первый блок определения координат, подключенный к съемнику координат и к блоку кодирования, выход которого соединен с одним входом блока памяти, другие входы которого подключены к блокам синхронизации и сопряжения, а выходы соединены с блоками выделения координат и синхронизации, второй блок определения координат, подключенный к датчику положения, вычислительному блоку и к блоку сравнения, входы которого соединены с блоками выделения координат, синхронизации и сопряжения, а выходы подключены к блоку синхронизации, соединенному с блоком сопряжения, и к блоку управления приводом,
соединенному с приводом, и первый анализатор, подключенный к фотоприемному элементу, к блокам управления приводом, синхронизации и формирования развертки, и планщет 2.
Его недостаток заключается в недостаточно высоком быстродействии устройства.
Цель изобретения состоит в повышении быстродействия устройства.
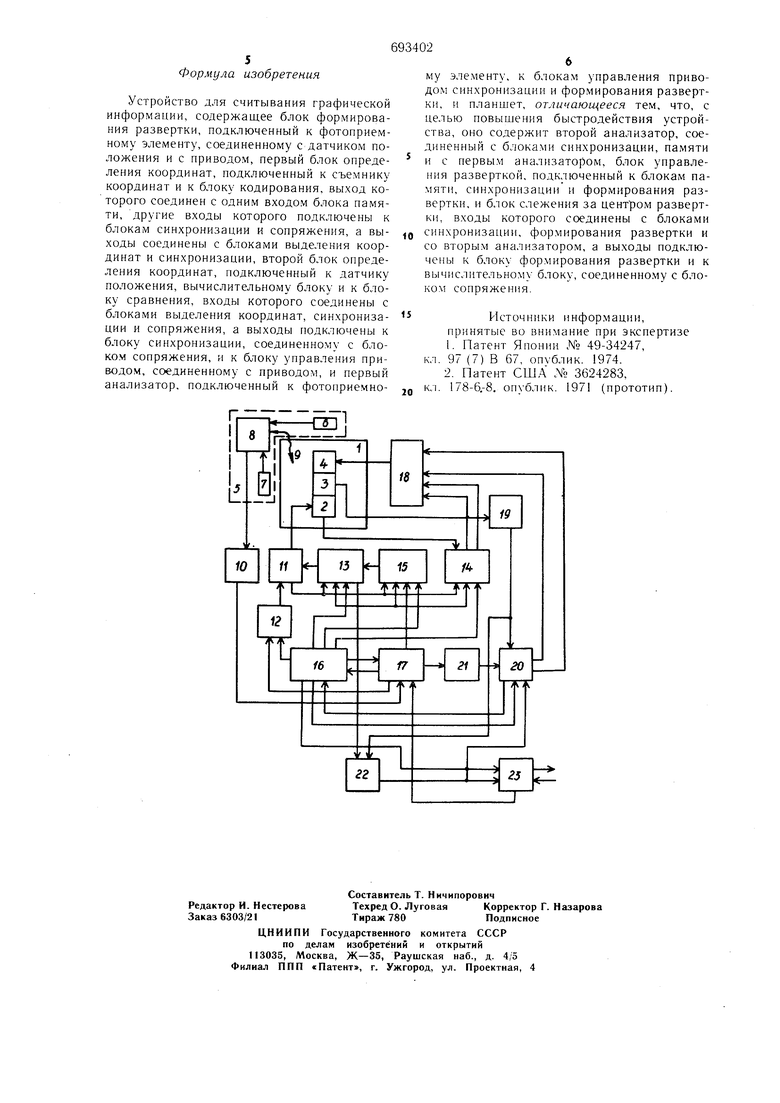
Поставленная цель достигается тем, что оно содержит второй анализатор, соединенный с блоками синхронизации, памяти и с первым анализатором, блок управления разверткой, подключенный к блокам памяти, синхронизации и формирования развертки, и блок слежения за центром pa3BepTkH, входы которого соединены с блоками синхронизации, формирования развертки и со вторым .анализаторов, а выходы подключены к блоку формирования развертки и к вычислительному блоку, соединенному с блоком сопряжения. На чертеже представлена блок-схема устройства. Устройство включает планшет 1, фотоприемный элемент 2, датчик 3 положения, привод 4, первый блок 5 определения координат, содержащий датчики 6, 7 и узел 8 формйрования численного значения координат, съемник 9 координат, блок 10 кодирования, блок 11 формирования развертки, блок 12 управления разверткой, блок 13 слежения за центром развертки, первый анализатор 14, второй анализатор 15, блок 16 синхронизации, блок 17 памяти, блок 18 управления приводом, второй блок 19 определения координат, блок 20 сравнения, блок 21 выделения координат, вычислительный блок 22 и блок 23 сопряжения. Устройство работает следующим образом. На планшете 1 находится чертеж, координаты точек которого необходимо преобразовать в цифровую форму путем отслеживания фотоголовкой линий чертежа. При наличии сложного чертежа, или когда необходимо отследить только ойределенную часть чертежа, составляется программа работы устройства. Программа может задаваться как автоматически с блока 23, так и оператором. Оператор с помощью блока 5 определения координат характерных точек чертежа в определенной последовательности считывает узловые точки линий. Одновременно в блоке 10 кодирования программы однозначно фиксируются существенные признаки точек (то ли точкапересечений линий, начало линии, экстремум и т. д .) а также вид перехода - фотоприемный элемент 2 между парами координат характерных точек, т. е. с передачей координат промежуточных точек в ЭВМ (отслеживание линии), без передачи координат (движение по кратчайшему расстоянию до заданной точки, например, при выходе - фотоприемный элемент 2 на начало линии), слежение по краю линии, по центру линии и т. д. Вся эта информация в строго определенном порядке запоминается в блоке Т7. Предположим, что фотоприемный элемент 2 находится в какой-то произвольной тбчке чертежа и необходимо в первом кадре осуществить переход по кратчайшему расстоянию к началу какой-либо линии, приближенная координата которой задана в программе и называется координатой конечной точки кадра. Информация о первом кадре разветвляется на координату конечной точки, которая выделяется в блоке 21, и на существенные признаки кадра (как указы валось, это вид движения, признак точки и т. д.). В то же время в блоке 19 по информации с датчика 3 формируется численное значение координаты фотоприемного элемента 2. Координаты сравниваются в блоке 20 и определяется направление к заданной точке, которое поступает в блок 18, управляющий работой привода 4. Фотоприемный элемент 2 движется по кратчайшему направлению к заданной точке. При приближении к заданной точке в некоторой зоне, которая определяется по площади его «видимости, блоком 20 выделяется сигнал «торможения, поступающий в блок 18 и блок 16 синхронизации. Блок 12 формирует управляющие сигналы для блока 11, определяющие вариант развертки в зависимости от режима работы устройства, который задается из блока 17. Сигнал из блока 15 поступает в блок 13 слежения за центром развертки, который вырабатывает соответствующее воздействие на блок 11 и осуществляет перенос центра развертки в характерную точку. Теперь сформированы следующие данные: точное положение фотоприёмного элемента 2 в блоке 19, которое однозначно соответствует центру экрана и на этом же экране центр развертки, зафиксированный в характерной точке с достаточно высокой точностью, определяемой разрещающей способностью фотоприемного элемента 2 (диссектора). Разница в их положении в численном виде из блока 13 поступает в блок 22 для вычисления точной координаты линии, где складывается с координатой истинного положения фотоприемного элемента 2 и вычисляется точная координата точки линии, поступающая как в блок 23, так и в блок 20. Блок 20 сравнивает точные координаты и вырабатывает сигнал на блок 18, в котором происходит коррекция положения фотоприемного элемента 2 до совпадения этих координат. .Совпадение координат является сигналом конца отработки кадра и устройство подготавливается к приему новой команды.. Предположим, что в следующем кадре необходимо отследить участок кривой линии от ее начала до какой-либо характерной точки, например, до пересечения с другой линией. Из блока 17 памяти вызывается информация о следующем кадре, которая опять распределяется на координату конечной точки и режимы работы. В соответствии с этим и выбирается порядок работы устройства. Введение новых блоков и новых конструктивных связей позволило существенно повысить быстродействие устройства. Формула изобретения Устройство для считывания графической информации, содержащее блок формирования развертки, подключенный к фотоприемному элементу, соединенному Сдатчиком положения и с приводом, первый блок определения координат, подключенный к съемнику координат и к блоку кодирования, выход которого соединен с одним входом блока памяти, другие входы которого подключены к блокам синхронизации и сопряжения, а выходы соединены с блоками выделения координат и синхронизации, второй блок определения координат, подключенный к датчику положения, вычислительному блоку и к блоку сравнения, входы которого соединены с блоками выделения координат, синхронизации и сопряжения, а выходы подключены к блоку синхронизации, соединенному с блоком сопряжения, и к блоку управления приводом, соединенному с приводом, и первый анализатор, подключенный к фотоприемно 62 му элементу, к блокам управления приводом синхронизации и формирования развертки, и планшет, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит второй анализатор, соединенный с блоками синхронизации, памяти и с первым анализатором, блок управления разверткой, подключенный к блокам памяти, синхронизации и формирования развертки, и блок слежения за центром развертки, входы которого соединены с блоками синхронизации, формирования развертки и со вторым анализатором, а выходы подключены к блоку формирования развертки и к вычислительному блоку, соединенному с блоком сопряжения. Источники информации, принятые во внимание при экспертизе 1.Патент Японии № 49-34247, кл. 97 (7) В 67, опублик. 1974. 2.Патент США № 3624283, кл. 178-6.-8. опублик. 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема координат с экрана электроннолучевой трубки | 1983 |
|
SU1144128A1 |
| Устройство для считывания изображений микрообъектов | 1978 |
|
SU678495A1 |
| Устройство для считывания графической информации | 1976 |
|
SU675436A1 |
| Устройство для съема координат сэКРАНА элЕКТРОННО-лучЕВОй ТРубКи | 1979 |
|
SU849196A1 |
| Устройство для считывания координат | 1990 |
|
SU1770963A1 |
| СПОСОБ ВИДЕОСОПРОВОЖДЕНИЯ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2716005C2 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2650789C2 |
| Устройство для считывания информации | 1981 |
|
SU982039A2 |
