Изобретение относится к ракетной технике, в частности, к оптическим координаторам систем телеуправления малогабаритных ракет и реактивных снарядов, стабилизируемых в полете вращением. Предлагаемое устройство может быть использовано, например, в оптических командных системах наведения однокональных противотанковых и зенитных ракет и артиллерийских снарядов.
Известна система наведения беспилотного летательного аппарата (ЛА) по линии визирования цели [1]. Система содержит установленные на ЛА источник света, который вырабатывает световой луч, направленный в сторону пусковой установки, приемник команд, задающее логическое устройство и ракетные двигатели одноразового действия, размещенные на наружной поверхности ЛА, и установленные на пусковой установке прицельные устройства, светочувствительные элементы ( приемника лучистой энергии), а также первое и второе устройства выработки управляющих команд и передатчик команд.
В известной системе наведения измерение координат ЛА осуществляется в горизонтальной и вертикальной плоскостях путем определения положения изображения трассера на светочувствительных элементах приемника лучистой энергии. Недостатком системы является наличие существенных ошибок наведения, обусловленных появлением неконтролируемых фазовых сдвигов между измерительной и исполнительной системами координат по крену (эффект скручивания систем координат). В частности, это проявляется во флуктуациях времени запаздывания срабатывания групп двигателей импульсной коррекции и в искажении сигналов угловой ориентации результирующей тяги, создаваемой каждой группой реактивных двигателей коррекции при нестабильности частоты вращения ЛА вокруг продольной оси.
Известна система управления огнем для наведения в полете вращающегося артиллерийского снаряда [2] , которая содержит: датчик, расположенный в точке, находящейся у периферии основания снаряда, и предназначен для создания электрического сигнала при попадании на датчик инфракрасного излучения; устройство для генерирования луча инфракрасной энергии, который направлен на датчик; устройство обнуления расстояния между центрами луча и вращающегося снаряда. Луч модулирован изображением вращающейся сетки (растра) так, что выходной результирующий сигнал от датчика обозначает рассогласование и направление рассогласования между центрами луча и снаряда.
Устройство для обнуления содержит логический контур и несколько патронов взрывного действия, расположенных по периферии снаряда. Логический контур по результирующему выходному сигналу датчика создает пусковой сигнал, когда рассогласование между центрами луча и снаряда превышает определенную величину, а один из патронов занимает положение, в котором при его срабатывании произойдет обнуление указанного рассогласования.
Для выделения угловых координат теплоизлучающих объектов используют модуляцию оптического излучения с помощью вращающихся модулирующих растров. Известны различные технические решения оптико-механических модуляторов, основанных на вращении модулирующего растра (МР) или сканировании оптического луча в плоскости модулирующего растра [11,12,5]. Рисунок из совокупности прозрачных и непрозрачных полос, нанесенный на поверхность МР, определяет вид модуляции и соответствующие модуляционные характеристики этих устройств.
Известен вращающийся двухрежимный снаряд, система самонаведения которого содержит первое приемное устройство (на вращающемся снаряде) и предназначенное для приема энергии в первом спектральном диапазоне излучения предполагаемой цели, а также для создания первого выходного сигнала, второе приемное устройство, установленное также на вращающемся снаряде и предназначенное для приема энергии во втором спектральном диапазоне излучения этой же предполагаемой цели, а также для создания второго выходного сигнала, и блок обработки сигналов, соединенный с первым и вторым приемными устройствами для получения от них первого и второго выходных сигналов и создания первого сигнала рассогласования на основе 1-го выходного сигнала и второго сигнала рассогласования на основе 2-го выходного сигнала. Блок обработки имеет устройство, обеспечивающее непрерывный выбор одного из сигналов рассогласования: 1-го или 2-го в соответствии с заложенной логической функцией.
Снижение уровня помех в известном устройстве достигается использованием двухканального приемника, работающего в одном из двух спектральных диапазонов излучения лоцируемого объекта. Недостатками устройства являются, по существу, одноканальная обработка сигнала рассогласования, которая потенциально не дает существенного выигрыша в точности определения координат.
Наиболее близким техническим решением к предлагаемому изобретению является "Оптическая система слежения" [4].
Оптическая система слежения [4] содержит фотоэмиссионный маяк, расположенный на движущемся объекте и передающий оптические сигналы, и оптическое устройство слежения, расположенное на носителе, принимающее оптические сигналы и вырабатывающее сигналы ошибки, используемые для соответствующего направления движущегося объекта.
Фотоэмисионный маяк содержит электронный высокочастотный генератор и низкочастотное модулирующее устройство, обеспечивающее модуляцию высокочастотного сигнала генератора. С выходом генератора соединен твердотельный источник света, излучающий свет в соответствии с поступающими на него модулированными сигналами генератора. Оптическое устройство содержит твердотельный светочувствительный оптический детектор, предусилитель, вырабатывающий сигналы, пропорциональные модулированным световым входным сигналам, и устройство выделения модулирующей частоты.
Маяк включает также времязадающее устройство, генерирующую частоту, кратную частоте генератора. Вход и выход 1-го делителя частоты соединены с выходом времязадающего устройства. Выход 1-го делителя частоты, с которого снимаются высокочастотные сигналы, соединен со входом второго делителя частоты, с выхода которого снимаются низкочастотные сигналы.
Оптическое устройство слежения, расположенное на носителе, содержит последовательно расположенные оптический детектор (преобразователь), предусилитель, устройство выделения модулирующей частоты (электронный блок анализа) и устройство выработки сигнала управления.
Известное техническое устройство [4] обладает относительно низкой помехозащищенностью и имеет ограниченные возможности для измерения координат летательных аппаратов, стабилизируемых в полете вращением. Точность измерения координат вращающихся реактивных снарядов (ВРС) с помощью известного технического решения ограничивается также использованием традиционного принципа двухканальной пеленгации движущегося объекта в вертикальной и горизонтальной плоскостях измерительной системы координат.
Целью предлагаемого изобретения является расширение функциональных возможностей и повышение точности измерения координат вращающегося реактивного снаряда (ВРС).
Цель изобретения достигается тем, что на борту ВРС в состав оптического маяка с 1-м источником инфракрасного (ИК) излучения, расположенным на оси вращения снаряда, дополнительно введены 2-й и 3-й источники ИК излучения, смещенные относительно оси вращения снаряда и расположенные в плоскости, перпендикулярной оси вращения снаряда; формирователь сигналов синхронизации 1-го, 2-го и 3-го источников ИК излучения, который содержит последовательно расположенные генератор синхроимпульсов и делитель частоты, счетный триггер, линию задержки, шифратор и узел кодирования, соединенный информационным входом с выходом шифратора, причем первый выход делителя частоты соединен со входом счетного триггера и через линию задержки с управляющим входом шифратора, первой и второй информационные входы которого подключены к прямому и инверсному выходам счетного триггера соответственно; синхронизирующий вход узла кодирования соединен с управляющим входом первого источника ИК излучения, а прямой и инверсный выходы счетного триггера - с управляющими входами второго и третьего источников ИК излучения соответственно.
Оптическое устройство слежения, расположенное на носителе, включает оптический преобразователь, который содержит объектив, блок оптического растра с блоком синхронизации и генератором опорного напряжения и фотоприемный блок, электронный блок анализа и устройство выработки сигнала управления.
При этом блок оптического растра содержит корпус, полую втулку с осью вращения, совпадающей с осью устройства, и модулирующий растр (МР), соосный со втулкой; внутри втулки симметрично МР установлены первая и вторая отклоняющие призмы, а на внутреннюю поверхность корпуса нанесены первая и вторая зеркальные дорожки в виде усеченных конических поверхностей, образующие которых параллельны отражающим граням соответственно первой и второй призм, и генератора опорного сигнала, содержащего последовательно соединенные цифровой датчик углового положения луча с кодирующим диском, фотопреобразователем и преобразователем кода, блок синхронизации и генератор опорного напряжения, причем кодирующий диск цифрового датчика положения луча закреплен на втулке, а его фотообразователь - на внешней части корпуса блока оптического растра.
Фотоприемный блок содержит расщепитель оптического луча, на вход которого поступает сигнал с первого выхода блока оптического растра, первый и второй фотоприемники, входы которых соединены с первым и вторым выходами расщепителя луча.
Кроме того, электронный блок анализа содержит последовательно соединенные 1-й усилитель-ограничитель, частотный детектор, фильтр низких частот (ФНЧ) и фазочувствительный демодулятор; последовательно соединенные 2-й усилитель-ограничитель, коммутатор, 1-ю дифференцирующую цепь, 1-й измеритель скважности импульсов, блок определения модуля отклонения снаряда (МОС) и измеритель среднеквадратического напряжения (СЗН); последовательно соединенные демодулятор широтно-импульсно-модулированного (ШИМ) сигнала, подключенный к выходу второго усилителя-ограничителя, блок определения угла крена снаряда (УКС) и фильтр огибающей; узел декодирования, подключенный к выходу 1-го усилителя-ограничителя, дешифратор, соединенный с выходом узла декодирования, первый и второй выходы которого подключены к первому и второму управляющим входам коммутатора, а третий выход - соединен с третьим входом блока определения УКС; последовательно соединенные 2-я дифференцирующая цепь, подключенная ко второму выходу коммутатора, 2-й измеритель скважности импульсов, линию задержки, выход которой подключен ко входу блока определения МОС, второй выход которого через согласующий фильтр подключен ко второму блоку определения УКС, четвертый вход которого соединен с выходом фазочувствительного демодулятора.
При этом входы 1-го и 2-го усилителей-ограничителей являются первым и вторым, а второй вход фазочувствительного демодулятора - третьим входами блока анализа соответственно.
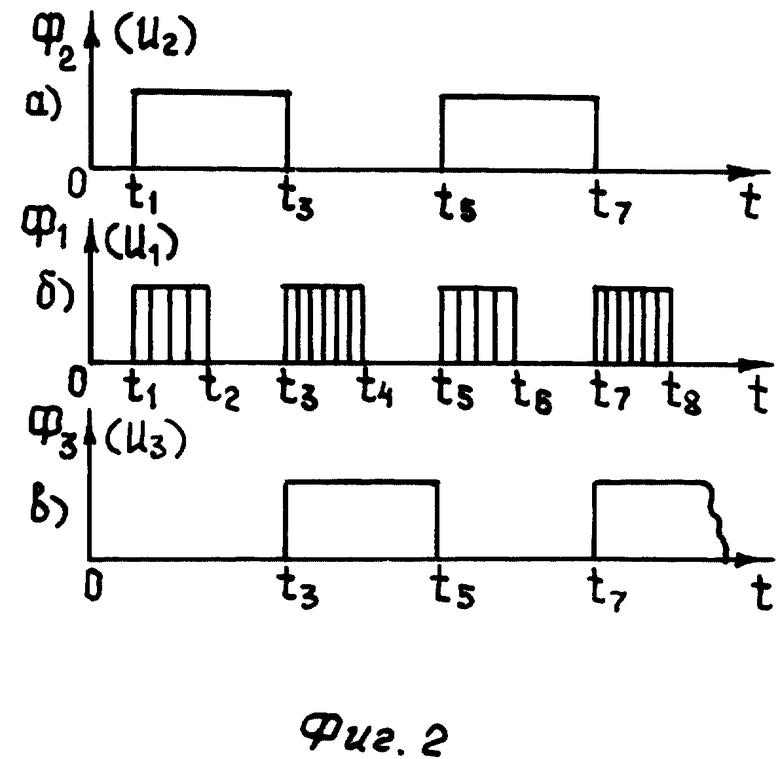
На фиг. 1 изображена схема, поясняющая взаимное расположение первого (центрального) 1, второго 2 и третьего 3 источников ИК излучения в плоскости YgO'Zg, перпендикулярной оси вращения снаряда.
При этом первый источник 1 работает в одной области спектра ИК излучения, а второй 2 и третий 3 источники работают попеременно в другой области спектра ИК излучения. За счет этого в аппаратуре носителя обеспечивается частотно-временная селекция сигналов периферийных источников 2 и 3 по отношению к сигналам источника 1.
На фиг.2 (а,б,в) представлены циклограммы работы Фi=f(t), i = 1,2,3 трех источников ИК излучения (Ф-лучистый поток) соответственно.
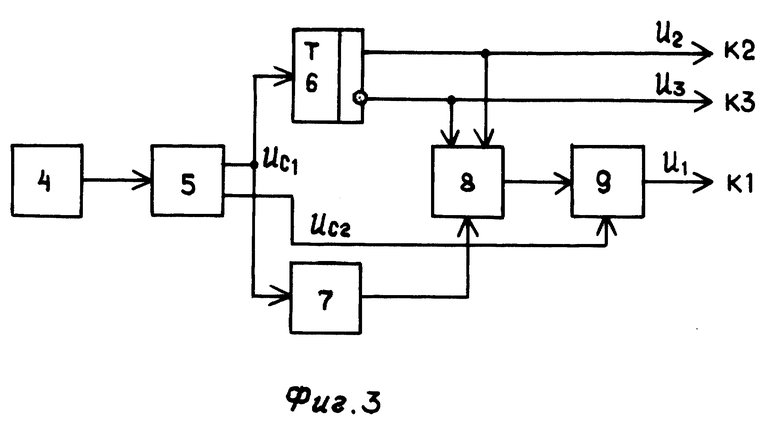
На фиг. 3 приведена структурная схема формирователя сигналов синхронизации источников ИК излучения, введенного в состав бортовой аппаратуры.
Формирователь сигналов синхронизации содержит (фиг.3) последовательно расположенные генератор синхроимпульсов 4 и делитель частоты 5, счетный триггер 6, линию задержки 7, шифратор 8 и узел кодирования 9, соединенный информационным входом с выходом шифратора 8, причем первый выход делителя частоты соединен со входом счетного триггера и через линию задержки с управляющим входом шифратора, первый и второй информационные входы которого подключены к прямому и инверсному выходам счетного триггера соответственно; синхронизирующий вход узла кодирования подключен ко второму выходу делителя частоты, при этом выход узла кодирования соединен с управляющим входом первого источника ИК излучения, а прямой и инверсный выходы счетного триггера - с управляющими входами второго и третьего источников ИК излучения соответственно.
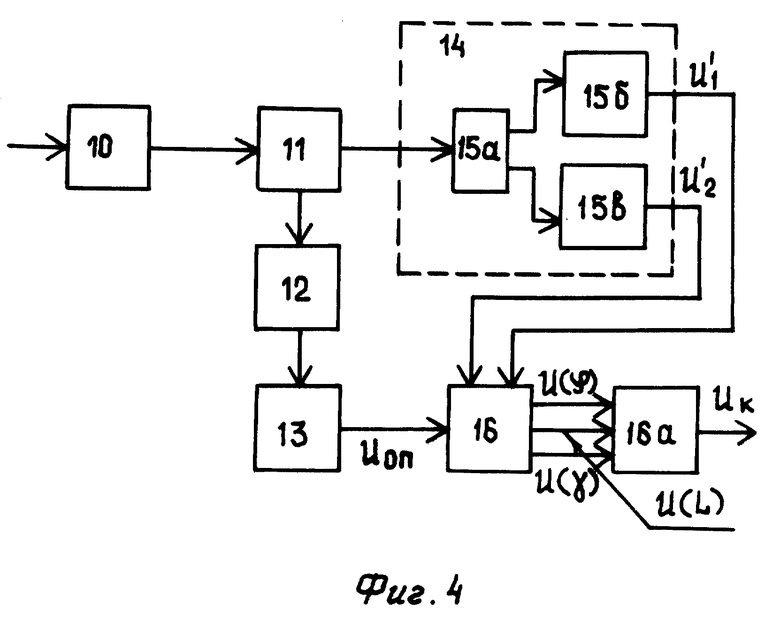
На фиг. 4 изображена функциональная схема оптического устройства слежения, расположенного на носителе.
Оптическое устройство слежения содержит (фиг.4): оптический преобразователь, включающий последовательно расположенные (оптически сопряженные) объектив 10, блок оптического растра 11 и фотоприемный блок 14, который содержит расщепитель луча 15а и первый 15б и второй 15в фотоприемники, блок синхронизации 12 и генератор опорного напряжения (ГОН) 13, а также электронный блок анализа 16 и блок выработки сигнала управления 16а.
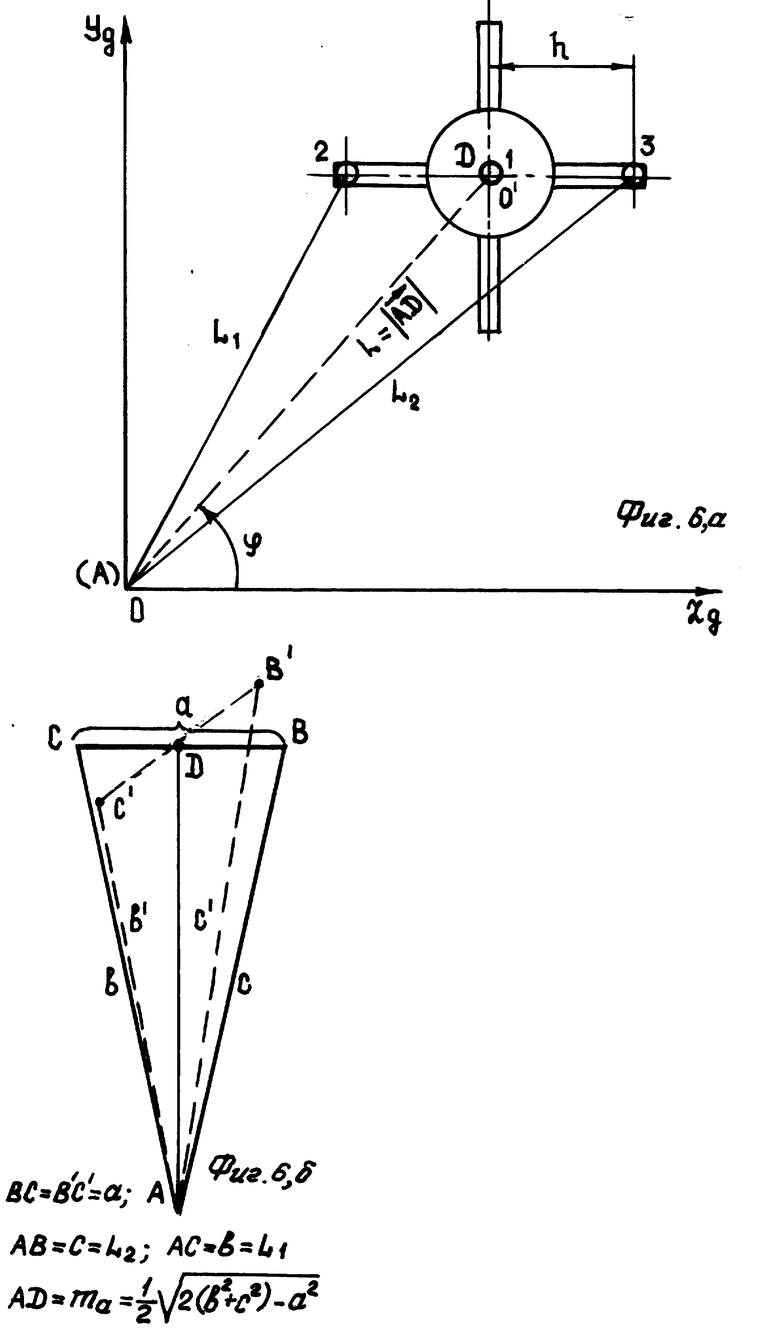
На фиг. 6а показано возможное положения ВРС в плоскости YgOZg информационного поля. При этом текущее положение ВРС относительно оптической оси координатора, совпадающей с линией визирования цели, характеризуется модулем  и фазой
и фазой  радиуса-вектора
радиуса-вектора  отклонения ВРС.
отклонения ВРС.
Здесь (и ниже) принято, что направление вращения снаряда - по часовой стрелке с угловой скоростью ωсн, а вектор  определяющий мгновенное радиальное направление, вращается с угловой скоростью ωм = 2πFм = const, где Fm - частота модуляции лучистого потока в блоке оптического растра.
определяющий мгновенное радиальное направление, вращается с угловой скоростью ωм = 2πFм = const, где Fm - частота модуляции лучистого потока в блоке оптического растра.
На фиг.6б приведена схема, поясняющая принятый в техническом решении алгоритм расчета модуля L радиуса-вектора 
Параметр L в треугольнике АВС (фиг.6б) является медианой L=ma, проведенной к стороне ВС= а, и согласно работе [6, с.51] может быть определен по трем известным сторонам по формуле
где 4 a, b, c = стороны треугольника АВС.
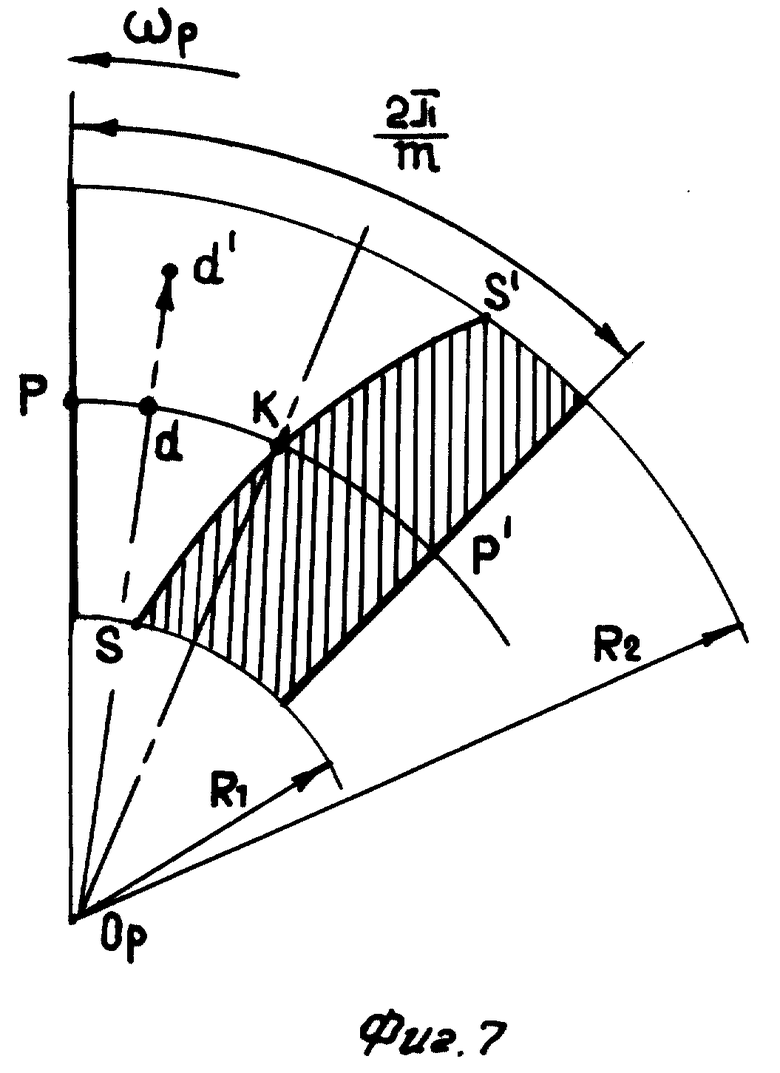
На фиг.7 показана возможная структура рисунка, нанесенного на поверхность оптического растра.
Оптический растр содержит m радиальных секторов, каждый из которых включает (фиг.7): прозрачный и непрозрачный участки в пределах кольцевой зоны, ограниченной окружностями радиусов R1 и R2(R1<R2). Прозрачный и непрозрачный участки разделены дугой SKS', которая делит дугу PKP' радиуса R3-0,5(R1+R2) пополам, т.е. PK=KP'.
В блоке оптического растра лучистый поток сканирует по окружности радиуса R3 по часовой стрелке с некоторой угловой скоростью ω = ωлп. Оптический растр вращается против часовой стрелки с угловой скоростью ω =ωp. Частота модуляции лучистого потока ωм = ωлп + ωр = 2πFм. В точке d, находящейся на окружности сканирования лучистого потока, смещенного относительно оптической оси блока 11, обеспечивается скважность импульсов Q=tи/tп=2 (tи-длительность импульса, tп-длительность паузы между импульсами. По мере удаления точки d от дуги PKP' в радиальном направлении (Rd возрастает) увеличивается скважность импульсов Q при неизменной частоте их следования, т.е. обеспечивается широтно-импульсная модуляция лучистого потока.
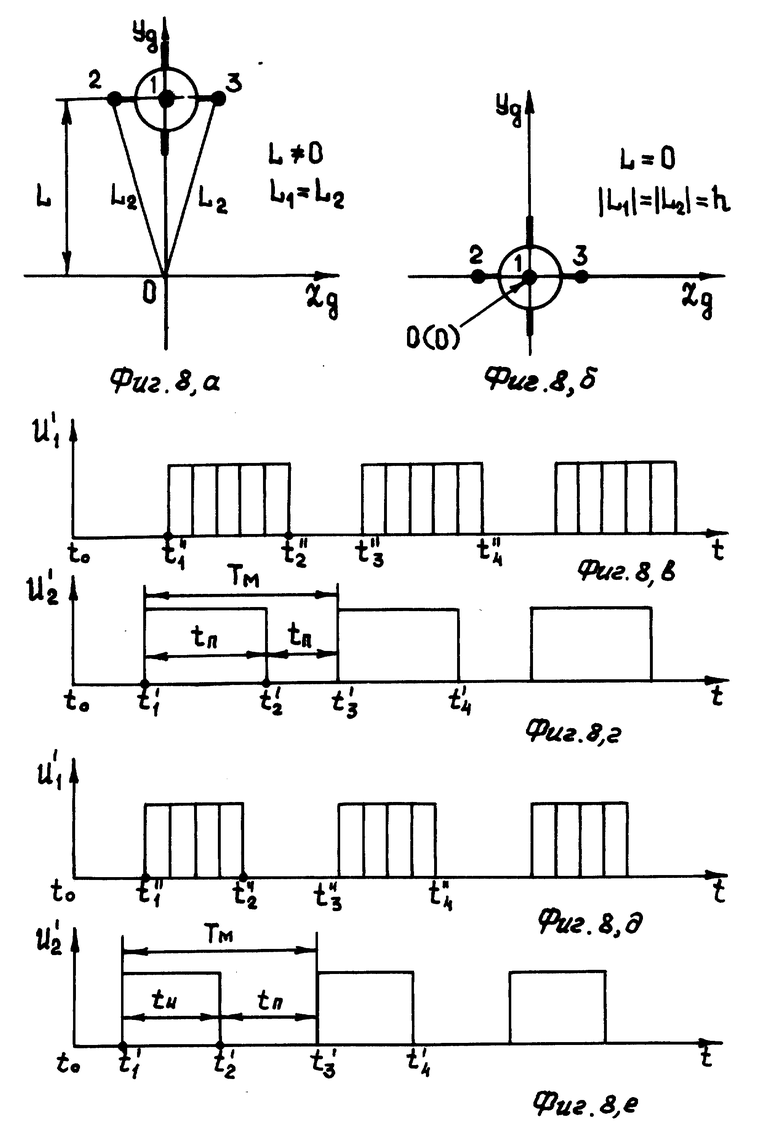
На фиг. 8 показаны возможные положения (два варианта) ВРС на плоскости YgOZg для случая: фаза радиуса-вектора ϕ = 90o; угол крена снаряда относительно радиального направления ψ = 90o; угол крена снаряда γ = 0o. Для упрощения принято, что активны, т. е. работают на излучение, только первый и третий источники ИК излучения. Сигналы  содержат информацию о признаке работающего на излучение периферийного третьего источника.
содержат информацию о признаке работающего на излучение периферийного третьего источника.
На фиг. 8а величина отклонения ВРС L≠0, L1 =L2. На фиг.8в и 8г показаны соответствующие сигналы  снимаемые с выходов первого и второго фотоприемников. Поскольку L≠=0, скважность импульсов Q>2.
снимаемые с выходов первого и второго фотоприемников. Поскольку L≠=0, скважность импульсов Q>2.
На фиг. 8б величина отклонения ВРС L=0,|L1| = |L2| = h.. На фиг.8д и 8е показаны соответствующие сигналы  Скважность импульсов Q __→ 2.
Скважность импульсов Q __→ 2.
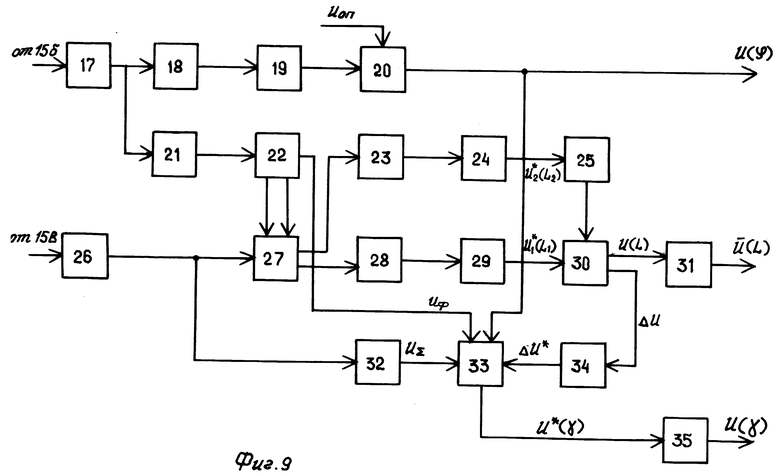
На фиг.9 изображена структурная схема блока анализа.
Блок анализа 16 содержит (фиг.9); первый усилитель-ограничитель 17, частотный детектор 18, ФНЧ 19, фазочувствительный демодулятор 20, узел декодирования 21, дешифратор 22, первую 28 и вторую 23 дифференцирующие цепи, линию задержки 25, первый 29 и второй 24 измерители скважности импульсов, второй усилитель-ограничитель 26, коммутатор 27, блок определения МОС 30, измеритель СЗН 31, демодулятор (ШИМ-сигналов) 32, согласующий фильтр 34, блок определения УКС 33 и фильтр огибающей 35.
Алгоритм определения модуля радиуса-вектора отклонения ВРС, реализованный в блоке 30, использует базовое соотношение (1). В нашем случае
ma=L, b=L1, c=L2 и a=2h,
где h - полуразнос второго и третьего источников ИК излучения, установленных на ВРС (фиг.6а). Путем эквивалентных преобразований приведем выражение (1) к виду
В блоке 30 предлагаемого технического решения материализуются зависимости
u(L) = [1/2(u2(L1)+u2(L2))-u2(h)]1/2
и
где u(h) - фиксированная константа;
Δu- сигнал поправки, используемой при вычислении крена в блоке определения УКС 33.
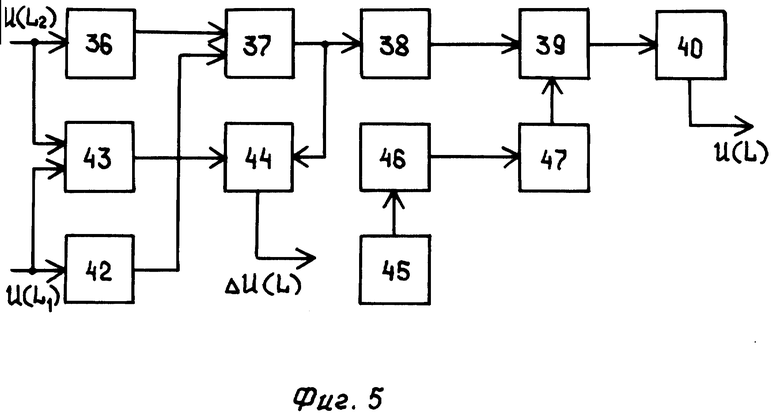
Блок определения модуля отклонения ВРС 30 содержит (фиг.5) последовательно соединенные первый квадратор 36, первый сумматор 37, делитель на два - 38, второй сумматор 39 и узел извлечения квадраторного корня 40; второй квадратор 42, выход которого подключен ко второму входу первого сумматора 37, модуль вычитания 43, первый и второй входы которого соединены со входами первого 36 и второго 42 квадраторов соответственно, модуль нормирования 44, первый вход которого соединен с выходом модуля вычитания 43, а второй вход - с выходом первого сумматора 37, второй вход которого подключен к выходу второго квадратора, а также последовательно соединенные модуль памяти 45, третий квадратор 46 и инвертор 47, выход которого соединен со вторым входом второго сумматора; при этом входы второго и первого квадраторов являются первым и вторым входами блока 30 определения модуля отклонения ВРС, а выходы модуля извлечения квадратного корня 40 и модуля нормирования 44 - первым и вторым выходами блока 30 определения модуля отклонения ВРС. Учитывая неизменность сигналов u(h), u2(h) и [-u2(h)], формируемых в модуле памяти 45, третьем квадраторе 46 и в инверторе 47 соответственно, функции указанных узлов могут быть объединены с помощью блока памяти, с выхода которого результирующий сигнал [-u2(h)] будет подаваться на второй вход второго сумматора 39.
Измеритель среднеквадратического значения напряжения строится по известной схеме, например, согласно работе [8].
Коммутатор 27 (фиг. 9) предназначен для подключения первого канала обработки, содержащего блоки 23, 24 и 25, или второго канала обработки, содержащего блоки 28 и 29, в зависимости от наличия разрушающих сигналов на управляющих входах 1 или 2. Коммутатор 27 может, например, представлять собой совокупность двух логических элементов И, информационные входы которых объединены, являются информационным входом коммутатора 27 и соединены с выходом второго усилителя-ограничителя. Управляющие входы первого и второго элементов И являются первым и вторым выходами дешифратора 22. Выходы первого и второго элементов И являются первым и вторым выходами коммутатора 27 соответственно.
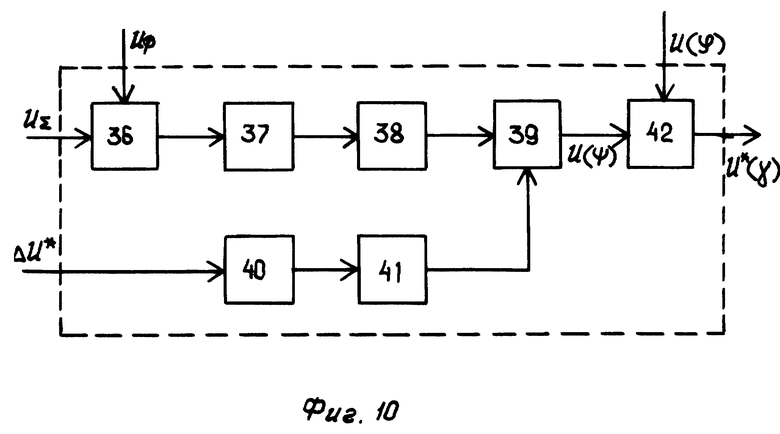
На фиг. 10 изображена структурная схема блока определения угла крена снаряда (УКС) 33 (вариант 1).
Блок 33 содержит последовательно соединенные управляемый инвертор 36, ФНЧ 37, первый измеритель фазы 38, модуль усреднения 39 и вычислитель УКС 42, а также фазовращатель (на 90o) 40 и второй измеритель фазы 41, выход которого соединен со вторым входом модуля усреднения 39. При этом первый вход управляемого инвертора 36 является первым входом блока 33 и подключен к выходу демодулятора ШИМ сигнала 32; второй вход (управляющий вход) инвертора 36 является третьим входом блока 33 и соединен с третьим выходом дешифратора 22; вход фазовращателя (на 90o) 40 является вторым входом блока 33 и соединен с выходом согласующего фильтра 34; второй вход вычислителя УКС 42 является четвертым входом блока 33 и соединен с выходом фазового демодулятора 20, а выход вычислителя УКС 42 является выходом блока определения УКС 33 и соединен со входом фильтра огибающей 35.
Управляемый инвертор 36 при наличии на втором (управляющем) входе разрешающего сигнала Uф≠0 изменяет фазу сигнала uΣ, поступающего на первый вход, на 180o.
Первый 38 и второй 41 измерители фаз гармонических сигналов имеют стандартное схемное решение [9] , например, при реализации измерителем функции
где x(t)- гармонический сигнал;
ω0 - круговая частота генератора опорного колебания;
T-интервал усреднения.
Структурная схема оптимального измерителя среднего значения фазы представлена в работе [9, фиг.5.14, с.129].
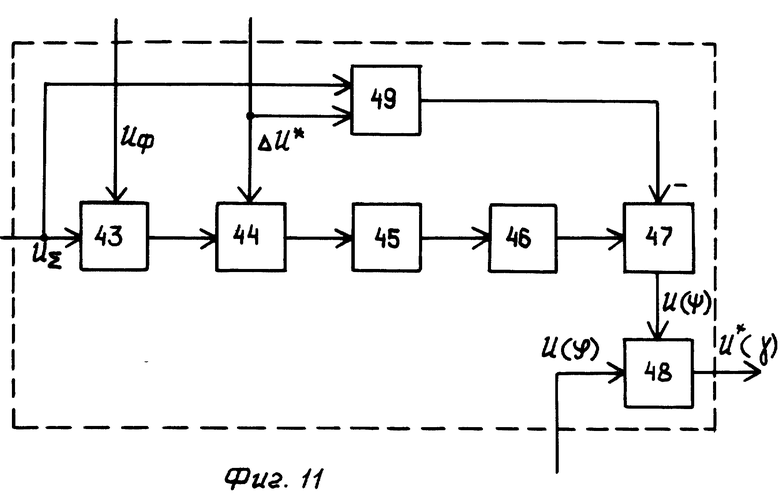
Другой возможный вариант построения блока определения угла крена снаряда строится на основе известного тригонометрического преобразования [10, с. 294]
asinα+bcosα = ρ(cosβsinα+cosαsinβ) = ρsin(α+β),
где
сдвиг по фазе β определяется из уравнения
tgβ = b/a, т.е β = arctg(b/a);
с учетом знаков коэффициентов (амплитуд составляющих)
a = ρcosβ и b = ρsinβ.
В этом случае блок определения УКС 33 включает (фиг.11) последовательно соединенные управляемый инвертор 43, сумматор 44, схему АРУ 45, измеритель фазы 46, модуль вычитания 47 и вычислитель УКС 48, а также вычислитель сдвига по фазе преобразованного сигнала β 49, выход которого соединен со вторым (разностным) входом модуля вычитания 47; при этом первые входы управляемого инвертора 43 и вычислителя 49 объединены и являются первым входом блока 33, вторые входы вычислителя 49 и сумматора 44 объединены и являются вторым входом блока 33; управляющий вход инвертора 43 подключен к третьему выходу дешифратора 22 и является третьим входом блока 33; второй вход вычислителя УКС 48 является четвертым входом блока 33, а выход вычислителя 48 - выходом блока 33, соединенным со входом фильтра огибающей 35.
Устройство работает следующим образом.
Через фиксированное время после выстрела на борту ВРС запускается генератор синхроимпульсов 4 (фиг. 3), сигнал с выхода которого поступает на вход делителя частоты 5. С первого выхода делителя частоты сигнал uc1 подается на вход счетного триггера 6 и одновременно на вход линии задержки 7. При этом на прямом и инверсном выходах триггера 6 формируются сигналы u2 и u3 (фиг.2 a, b), которые поступают на управляющие входы источников 2 и 3 ИК излучения соответственно, синхронизируя их попеременную работу в режиме излучения. Линия задержки 7 вносит запаздывание в сигнал uc1, соответствующее времени Δt переключения триггера 6. Сигнал с выхода линии задержки 7 подается на синхровход шифратора 8, на второй и третий входы которого поступает сигнал u2 и u3 соответственно. При этом шифратор 8 формирует сообщение, например, в виде двоичной кодовой комбинации о признаке (маркере) источника (второго или третьего), работающего на излучение. Сформированная K-разрядная (K≤2) кодовая комбинация поступает на информационный вход узла кодирования 9, на синхровход которого подается сигнал uc2 с второго выхода делителя частоты 5. В узле кодирования 9 с информационным разрядам добавляются проверочные разряды (символы) и формируется кодовая комбинация (n, k) систематического кода, которая затем поступает на управляющий вход источника 1, обеспечивая внутриимпульсную модуляцию лучевого потока (фиг.2 б). При этом конструктивно узел кодирования признака источника систематическим (n, k) -кодом может содержать, например, n-разрядный регистр сдвига и r=(n-k) сумматоров по модулю 2 [7, с.322].
Источники 1, 2 и 3 ИК излучения, размещенные на борту ВРС, создают лучистый поток, направленный в сторону носителя. На носителе объектив 10 фокусирует лучистый поток в плоскости YOZ, в которой размещен модулирующий растр (MP) блока 11. После прохождения модулятора 11 промодулированный лучистый поток подается на расщепитель луча 15a фотоприемного блока 14. Первая составляющая луча поступает через первый оптический фильтр в первый фотоэлемент фотоприемника 15б, на выходе которого появляется электрический сигнал  лишь в том случае, если на оптический фильтр было подано ИК излучение первого частотного поддиапазона от первого (центрального) источника 1 BPC. Одновременно вторая составляющая луча последовательно поступает во второй оптический фильтр и во второй элемент фотоприемника 15в, на выходе которого электрический сигнал
лишь в том случае, если на оптический фильтр было подано ИК излучение первого частотного поддиапазона от первого (центрального) источника 1 BPC. Одновременно вторая составляющая луча последовательно поступает во второй оптический фильтр и во второй элемент фотоприемника 15в, на выходе которого электрический сигнал  появляется лишь в том случае, если на оптический фильтр было подано ИК излучение второго частотного поддиапазона от периферийного источника (2 или 3) BPC.
появляется лишь в том случае, если на оптический фильтр было подано ИК излучение второго частотного поддиапазона от периферийного источника (2 или 3) BPC.
Условия для частотно-временной селекции сигналов в первом и втором фотоприемниках обеспечиваются путем настройки их оптических фильтров на различные области спектра, в которых работают соответственно центральный (первый) 1 и периферийные (2 и 3) источники ИК излучения, размещения на BPC.
Сигнал  на выходе фотоприемника 15б при смещении BPC относительно направления на цель имеет двойную модуляцию: по длительности импульсов и по частоте их следования; при этом информация, необходимая для определения фазы радиуса-вектора отклонения, содержится в фазе низкочастотной огибающей частотно-модулированного сигнала, а информация о признаке периферийного источника, работающего в данный момент времени на изучение, содержит в информационной части двоичной кодовой комбинации, введенной в лучистый поток Ф с помощью шифратора 8 и узла кодирования 9 (фиг. 2б).
на выходе фотоприемника 15б при смещении BPC относительно направления на цель имеет двойную модуляцию: по длительности импульсов и по частоте их следования; при этом информация, необходимая для определения фазы радиуса-вектора отклонения, содержится в фазе низкочастотной огибающей частотно-модулированного сигнала, а информация о признаке периферийного источника, работающего в данный момент времени на изучение, содержит в информационной части двоичной кодовой комбинации, введенной в лучистый поток Ф с помощью шифратора 8 и узла кодирования 9 (фиг. 2б).
Сигнал  на выходе фотоприемника 15в промодулирован по длительности (широте импульсов) и частоте. Наличие низкочастотной колебательной составляющей, что обусловлено вращательным движением периферийного источника вокруг продольной оси снаряда, в законе широтно-импульсной модуляции позволяет выделить сигнал, пропорциональный величине крена BPC.
на выходе фотоприемника 15в промодулирован по длительности (широте импульсов) и частоте. Наличие низкочастотной колебательной составляющей, что обусловлено вращательным движением периферийного источника вокруг продольной оси снаряда, в законе широтно-импульсной модуляции позволяет выделить сигнал, пропорциональный величине крена BPC.
Сигнал с выхода усилителя-ограничителя 17 последовательно поступает в частотный детектор 18, в котором в результате детектирования образуется синусоидально изменяющееся напряжение на частоте сканирования (развертки) луча в плоскости МР блока 11. Это напряжение выделяется с помощью фильтра низких частот 19, который подавляет высшие гармоники продетектированного сигнала. Сигнал с выхода ФНЧ 19 подается на информационный вход фазочувствительного демодулятора 20, на управляющий вход которого поступает сигнал uоп с выхода ГОН 13 (фиг. 4). В демодуляторе 20 по принципу синхронного детектирования выделяется сигнал u(ϕ), амплитуда которого пропорциональна разности фаз входных сигналов.
Выходной сигнал u(ϕ) является первым выходом блока анализа 16 и представляет собой первую координату BPC, определяющую фазу (аргумент) ϕ радиуса-вектора отклонения BPC в полярной системе координат (фиг.6а).
Одновременно сигнал с выхода первого усилителя-ограничителя 17 поступает на вход узла декодирования 21, в котором последовательно осуществляются операции демодуляции и декодирования. С выхода узла 21 к-разрядная кодовая комбинация, содержащая признак излучающего периферийного источника, подается на вход дешифратора 22. При этом в зависимости от указанного признака на первом выходе дешифратора, если активен второй источник 2, или на втором его выходе, если активен третий источник 3 ИК излучения, появляются сигналы управления коммутатором 27.
Сигнал u2 с выхода второго усилителя-ограничителя 26 поступает на информационный вход коммутатора 27, который в зависимости от сигналов на первом и втором управляющих входах обеспечивает подключение первой 28 или второй 23 дифференцирующих цепей соответственно. Дифференцирующие цепи 28 и 23 с помощью разнополярных импульсов малой длительности обеспечивают выделение переднего и заднего фронтов ШИМ-сигналов.
В измерителях 29 и 24 определяются численные значения скважиностей Q1 и Q2 импульсов от второго 2 и третьего 3 источников ИК излучения и формируются соответствующие им напряжения u
Линия задержки 25 создает запаздывание во времени сигнала, поступающего с выхода второго измерителя 24 на величину Δt = t3-t1 (фиг.2), численно равную периоду следования сигналов Ф1 источника 1. Этим достигается одновременное поступление сигналов на первый и второй входы блока 30 с выходов измерителей скважности 29 и 24.
С первого выхода блока определения модуля отклонения 30 BPC сигнал поступает на измеритель среднеквадратического значения напряжения, выходной сигнал которого  является второй координатой BPC. Со второго выхода блока 30 снимается сигнал поправки Δu, пропорциональный величине
является второй координатой BPC. Со второго выхода блока 30 снимается сигнал поправки Δu, пропорциональный величине
где L1 и L2 - линейные отклонения источников 2 и 3 ИК излучения от линии визирования цели.
После преобразования в согласующем фильтре 34 сигнал поправки Δu* подается на второй вход блока определения УКС 33.
Сигнал с выхода второго усилителя-ограничителя 26 поступает также на вход демодулятора (ШИМ-сигнала) 32, в котором происходит выделение сигнала uΣ, который является огибающей суммы низкочастотной и колебательной составляющих. Эти составляющие определяются соответственно значениями линейного отклонения центра масс BPC от точки O, лежащей на линии визирования цели, и углового отклонения периферийного источника относительно радиального направления, задаваемого в системе координат YgOZg лучом OO' (фиг.6). С выхода демодулятора 32 выделенный сигнал u поступает на первый вход блока определения УКС 33, на второй вход которого подается поправка Δu*, которая формируется в блоке определения модуля отклонения 30 BPC и согласующем фильтре 34. При этом на третий вход блока 33 подается сигнал uф признака периферийного источника, снимаемый с третьего выхода дешифратора 22, а на четвертый вход - подается сигнал u(ϕ) с выхода фазового демодулятора 20. Сигнал uф управляет сдвигом по фазе выходного сигнала u*(γ) блока 33, причем фаза сигнала u*(γ) изменяется на 180o при переключении источников 2 и 3. С выхода блока коррекции 33 сигнал u*(γ), обусловленный колебательной составляющей сигнала  поступает на фильтр огибающей 35, в котором осуществляется выделение сигнала u(γ) на частоте вращения снаряда. Снимаемый с выхода блока 35 сигнал u(γ) содержит информацию о величине крена γ и является третьей координатой BPC.
поступает на фильтр огибающей 35, в котором осуществляется выделение сигнала u(γ) на частоте вращения снаряда. Снимаемый с выхода блока 35 сигнал u(γ) содержит информацию о величине крена γ и является третьей координатой BPC.
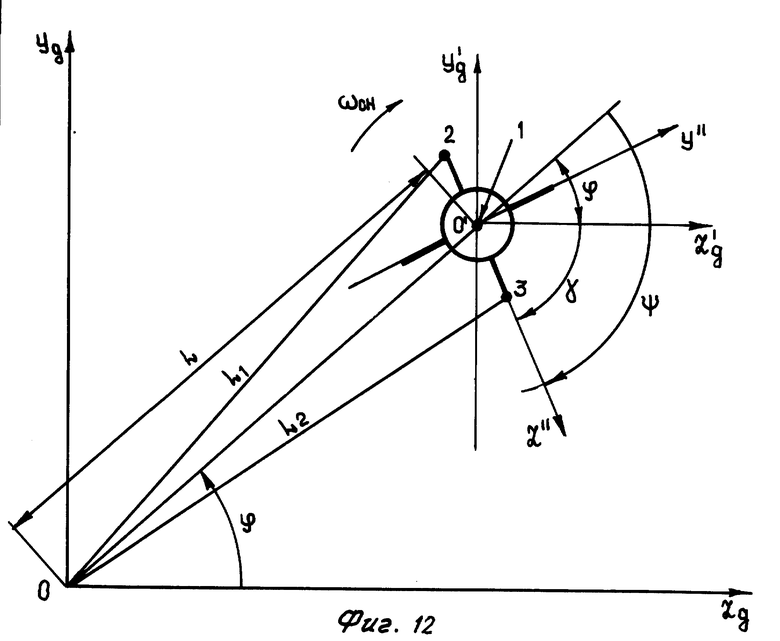
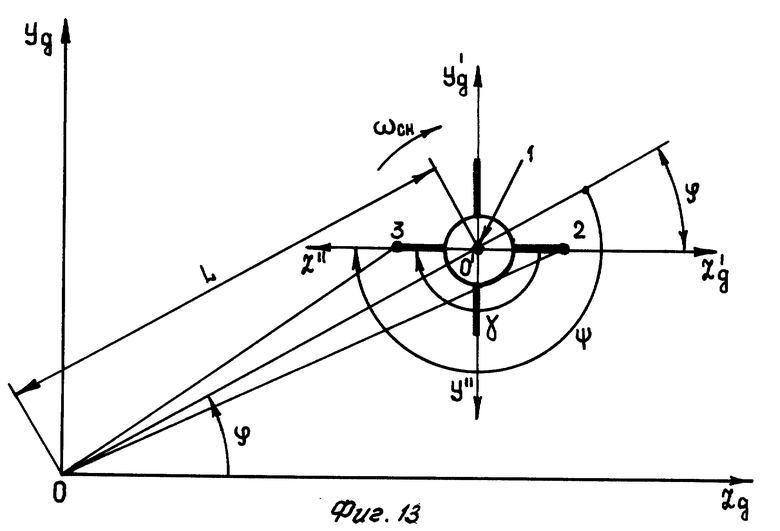
На фиг.12 и 13 показаны два возможных положения BPC в нормальной земной системе координат YgOZg, начало и оси которой совмещены с измерительной системой координат носителя.
На фиг. 12 и 13 обозначено  перенесенная система координат, в которой точка O' находится на оси вращения снаряда; Y''O'Z'' - связанная система координат, которая вращается с угловой скоростью ωсн = γ(t) относительно системы координат
перенесенная система координат, в которой точка O' находится на оси вращения снаряда; Y''O'Z'' - связанная система координат, которая вращается с угловой скоростью ωсн = γ(t) относительно системы координат  .
.
Вычисление угла крена γ(t) осуществляется в блоке 33 в соответствии с выражением
γ(t) = (-1)ν•ψ(t)-ϕ(t),
где
ψ(t) - угол крена снаряда относительно радиального направления, задаваемого лучом 
ϕ(t) - фаза вектора отклонения  в полярной системе координат;
в полярной системе координат;
ν - целое число (ν = 0;1), соответствующее номеру активного (2-го или 3-го) вынесенного источника ИК излучения, причем ν ≡ Uф; на фиг. 12, 13 принято, что Uф=O и ν = 0.
Благодаря введению новых функциональных элементов в состав оптического маяка на борту BPC (второго и третьего источников ИК излучения и формирователя сигналов синхронизации источников ИК излучения), а также дополнительных узлов в состав оптического устройства слежения на носителе и функциональных связей между ними предлагаемое устройство позволяет по отношению к прототипу [4] повысить точность определения модуля |L| радиуса-вектора отклонения и величины крена γ BPC.
В предложенном техническом решении осуществляется поочередное пеленгование разнесенных источников ИК излучения (2 или 3), установленных на BPC, с последующей моноимпульсной обработкой результатов измерений. Полярные координаты BPC выделяются на частоте модуляции потока лучистой энергии в блоке оптического растра 11 (фиг. 4), что обеспечивает дополнительное увеличение точности их измерения, в частности, модуля радиуса-вектора отклонения и угла крена BPC', путем усреднения во времени и фильтрации результатов измерения (фиг.9, блоки 31 и 35).
По данным моделирования выигрыш в точности измерения модуля радиуса-вектора отклонения наиболее значителен в зоне малых отклонений при |L| ≤ (3. . . 8)h. В частности, дисперсия шума измерения указанного параметра по отношению к прототипу уменьшена на 20...25%. Дискриминационная характеристика устройства (по параметру |L|) всегда положительна и практически не имеет зоны нечувствительности.
По мнению авторов предлагаемое техническое решение обладает существенной новизной, дает положительный эффект и является полезным. Его внедрение позволит уменьшить флуктуационные ошибки в измерении модуля радиуса-вектора отклонения и крена BPC и устранить неоднозначность определения полярных координат BPC в зоне малых отклонений. Введение дополнительных функциональных элементов в состав бортовой аппаратуры и аппаратуры носителя позволяет перейти к одноканальному управлению BPC.
Схемная реализация блока анализа с учетом введенных узлов возможна на базе серийных ИМC средней плотности интеграции. Заявляемое техническое решение может быть использовано, например, в противотанковых артиллерийских системах, оснащенных командными системами телеуправления с оптическим каналом визирования BPC. Предлагаемое изобретение может быть полезным также при разработке новых технических решений координаторов малогабаритных зенитных управляемых ракет с одноканальным управлением на траектории.
Источники информации
1. Система наведения. Патент (США) 3868883. МКИ F 42 B 15/04. Приоритет 4.03.1975 г.
2. Система управления огнем. Патент (США) 4300736. МКИ F 41 G 7/00. Публикация 17.11.1981 г.
3. Вращающийся двухрежимный снаряд. Патент (США) 4264907. МКИ F 41 G 7/00; G 01 S 13/86. Публикация 28.04.1981 г.
4. Оптическая система слежения. Патент (США) 4027837. МКИ F 41 G 7/00. Публикация 7.06.1977 г. (Прототип).
5. Способ и устройство для модулирования излучения трассера ракеты. Патент (ФРГ) 2944261. МКИ F 41 G 7/00 // G 01 S 1/70. Публикация 17.07.1986 г.
6. Справочник по математике для научных работников и инженеров. /Корн Г. , Корн Т. -М. : Наука. Главная реакция физико-математической литературы, 1984. - 832 с.
7. Пенин П. И. Системы передачи цифровой информации. -М.: Сов. радио, 1976.
8. Попов В. С., Желбаков И.Н. Измерение среднеквадратического значения напряжения. -М.: Энергоатомиздат, 1987 - 120с.
9. Переход Н.Г. Измерение параметров фазы случайных сигналов. - Томск: Радио и связь, 1990. - 310 с.
10. Справочник по элементарной математике. Под.ред. П.Ф. Фильчакова, - Киев: Наукова Думка, 1967. - 442 с.
11. Якушенков Ю.Г., Луканцев В.Н., Колосов М.П. Методы борьбы с помехами в оптико-электронных приборах. - М.: Радио и связь, 1981- 180 с.
12. Криксунов Л. З. Справочник по основам инфракрасной техники. - М.: Сов. радио, 1978 -400с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАКЕТОЙ | 1997 |
|
RU2114373C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2719535C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
Изобретение относится к ракетной технике, в частности к оптическим координаторам систем телеуправления летательных аппаратов, стабилизируемых в полете вращением. Целью предлагаемого изобретения является расширение функциональных возможностей и повышение точности измерения координат вращающегося реактивного снаряда (ВРС). Для этого на борту размещены 1-й источник ИК излучения, расположенный на оси вращения снаряда и работающий в одной области спектрального диапазона, 2-й и 3-й источники ИК излучения, вынесенные относительно оси вращения снаряда, работающие на излучение попеременно в другом спектральном диапазоне, а также устройство формирования сигналов синхронизации работы источников ИК излучения. На носителе расположено оптическое устройство слежения за излучением ВРС, содержащее последовательно соединенные объектив, блок оптического растра с блоком синхронизации и генератором опорного напряжения, расщепитель луча на две составляющие, два фотоприемника, каждый из которых работает в одном или другом спектральном диапазоне, электронный блок анализа и блок выработки сигнала управления. В оптическом устройстве слежения осуществляются выделение сигналов от трех источников ИК излучения на основе спектрально-временой селекции и их совместная обработка, в результате которой определяются полярные координаты ВРС: модуль и фаза радиуса-вектора отклонения ВРС в измерительной системе координат, связанной с носителем и угол крена ВРС. Предложенное решение позволяет определить полярные координаты, необходимые для осуществления одноканального управления ВРС. 3 з.п.ф-лы, 13 ил.
| US 4027837 A, 07.06.77 | |||
| US 4264907 A, 28.04.81 | |||
| US 4300736 A, 17.11.81 | |||
| US 3868883 A, 04.03.75 | |||
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| RU 94045441 A1, 20.10.96 | |||
| DE 2944261 C1, 17.07.86. | |||
