(54) ПРОВОЛОКОПРОТЯНШЫЙ МЕХАНИЗМ РЕГИСТРАТЭРА

| название | год | авторы | номер документа |
|---|---|---|---|
| Проволокопротяжный механизм | 1983 |
|
SU1089622A1 |
| МНОГОКАНАЛЬНЫЙ МАГНИТНЫЙ СЕЙСМИЧЕСКИЙ | 1968 |
|
SU208289A1 |
| Способ измерения параметров магнитных головок | 1981 |
|
SU1051574A1 |
| БЛОК МАГНИТНЫХ ГОЛОВОК ДЛЯ ПРОВОЛОКОПРОТЯЖНОГО Л\ЕХАИИЗМА | 1973 |
|
SU399912A1 |
| ПРОВОЛОКОПРОТЯЖНЫЙ МЕХАНИЗМ | 1970 |
|
SU259426A1 |
| Устройство для проверки магнитных головок | 1981 |
|
SU970448A1 |
| СТАНЦИЯ ДЛЯ ВИБРАЦИОННОЙ СЕЙСМИЧЕСКОЙРАЗВЕДКИ | 1970 |
|
SU269509A1 |
| Устройство для проверки магнитных головок | 1980 |
|
SU892472A1 |
| ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ | 1989 |
|
RU1764447C |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ СИГНАЛОВ С ВЫБОРОЧНОЙ ПЕРЕЗАПИСЬЮ | 1992 |
|
RU2029389C1 |

1
Изобретение относится к приборостроению, а .именно к устройствам для записи инфврмации на проволочный магнитный носитель, расположенный на катушках проволокопротяжного механизма.
Известен автономный регистратор параметров, содержащий проволокопро- тяжный механизм с магнитными толовками, коммутатор, мерный барабан для проволоки, вал которого связан с датчиком перемещения магнитной проволоки 1.
Известен ироволокопротяжный механизм для записи информации на проволочный носитель, расположенный на катушках приемного и подающего узлов и содержащий гоповки записи и воспроизведения и устройство для слежения за дорожками записи в процессе воспроиз ведения 2.
Наиболее близким к предлагаемому является проволокопротяжшлй механизм регистратора, содержащий записывающие головки, приемные и подающие катушки с магнитным носителем и привод проволокопротяжного механизма з.
Недостатки известных устройств заключаются в сложности конструкции проволокопротяжного механизма, что снижает надежность регистратора, а также в невозможности одновременной записи нескольких параметров на одну дорожку последовательно .по ее длине.
Пель изобретения - регистрация нескольких параметров на одну дорожку записи.
Поставленная цель достигается тем, что Т1роволоко1фотяжный механизм снабжен узлом перемещения- записывающих головок вдоль носителя, связанным с приводом проволокопротяжного механизма, а .также тем, что узел выполнен в виде платформы, имеющей возможность вращательного или возвратнопоступательного перемещения.
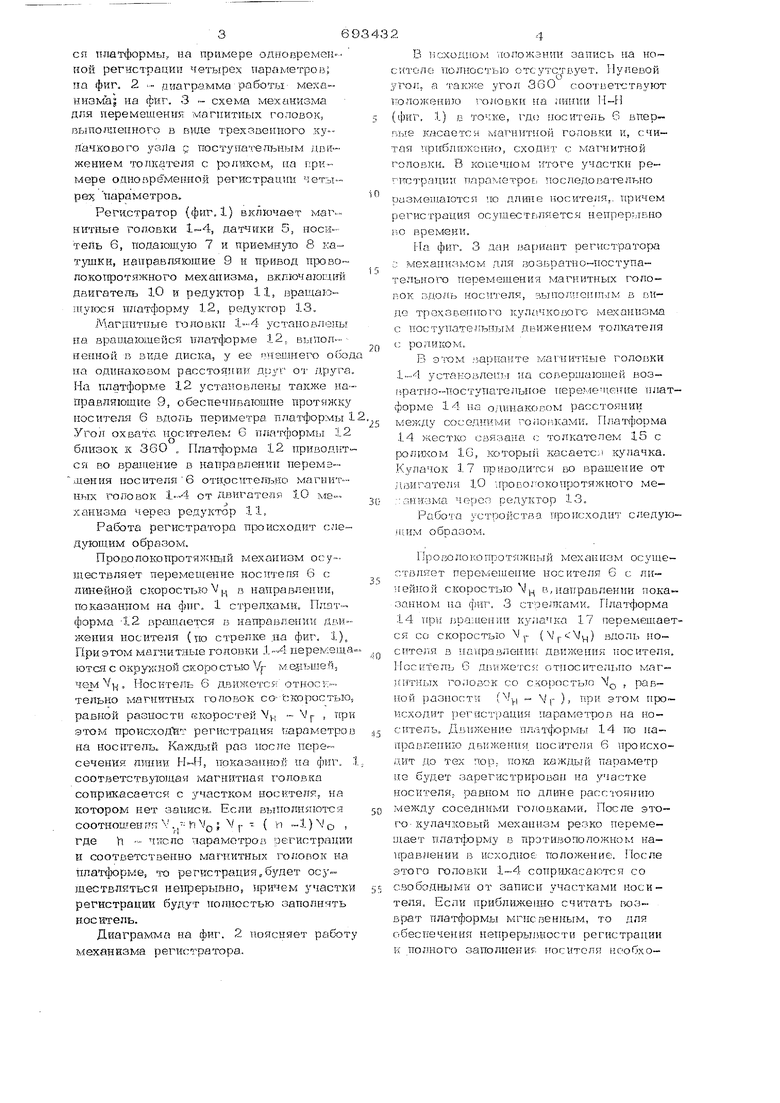
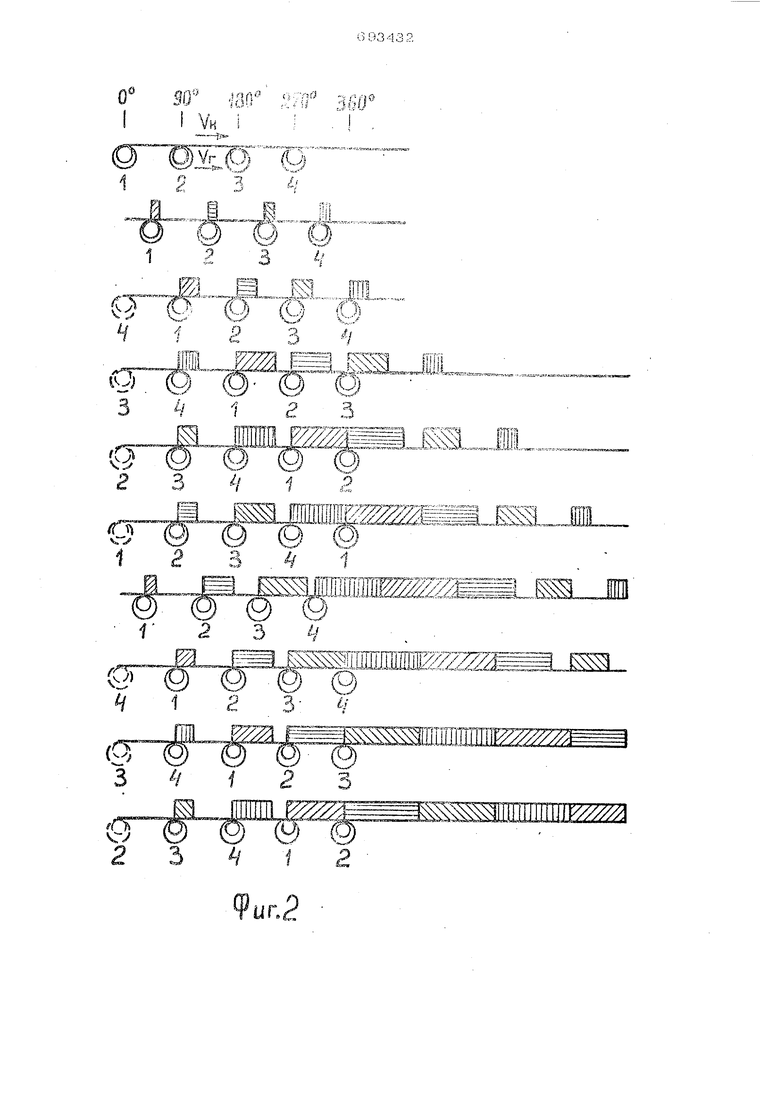
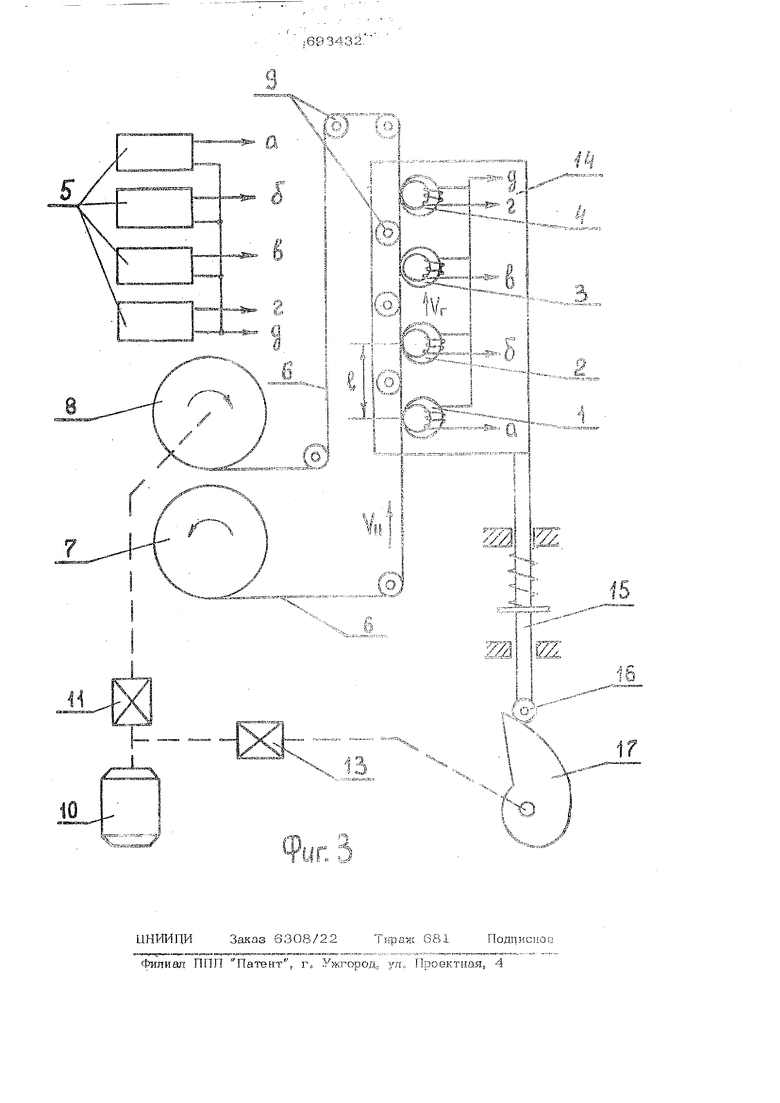
На фиг. 1 Изображена схема механизма для перемещения магнитных головок, выполненн9Го в виде вращающей36ся платформы, на примере одновременной регистрации четырех параметров; -гна фиг, 2 - диаграмма работы мехаНИЗК&; на фиг. 3 - схема механизма йпй перемещения магнитных гоповок, выполненного в виде трехзвенного куriia4K6Boro yarta у поступательным движением толкателя с роликом, на примере oflHOBp vteHHOfl регистрации четырез{ tiapaMeTpOB. Регистратор (фиг. 1) включает магнитные головки 1-4, датчики 5, носитель б, подающую 7 и приемную 8 катушки, направляющие 9 и привод проволокопротяжного механизма, включающий двигатель Ю и редуктор 11, вращающуюся платформу 12, редуктор 13. Магнитные головки 1-4 установлены на вращающейся платформе 12, выпол-ненной в виде диска, у ее внешнего обод на одинаковом расстоянии друг от друга На платформе 12 установлены также направляющие 9, обеспечивающие протяжку носителя 6 вдоль периметра платформы 1 Угол охвата носителем б платформы 12 близок к 360 . Платформа 12 приводится во вращение в направлении перемещения носителяб отнрсительно магнитных головок 1-4 от двигателя Ю механизма через редуктор 11. Работа регистратора происходит следующим образом. Проволокопротяжный механизм осуществляет перемещение носителя б с линейной скоростью V ц в направлении, показанном на фиг. 1 стрелками. Платформа -12 вращается в направлении движения носителя (да стрелке .на фиг. 1). При этом магнитные головки 1-4 перемеща ются с окружной скороcTUoVf , 4eMV. Носитель б движется относи-; тельно магнитных головок со-скоростью, равной рйзности екоростей , при этом происходит регистрация параметров на носитель. Каждый раз после пересечения пинии Н-Н, показанной на фиг. соответствующая магнитная головка соприкасается с участком носителя, на котором нет записи. Если выполняются соотнощения у, 1 о Г ) о где h - число параметров регистрации 0 соответственно магнитных ix ловок на платформе, то регистрация,будет осуществляться непрерывно, тфичем участки регистрации будут полностью заполнять йос шгеЛб, - Диаграмма на фиг. 2 поясняет работу мехйнизма регистратора. 2 В исходном положении запись нА носителе полностью отсутствует. Нулевой угол, а также утоп ЗбО соответствуют положению головки на линии Н-Н (фиг. I) в точке, где носитель 6 впервые касается магнитной головки и, считая приближенно, сходит с магнитной головки. В конечном итоге участки регистрации параметров последовательно размещаются по длине носителя,, причем регистрация осутцествляется непрерывно во времени. На фиг. 3 дан вариант регистратора с механизмом для возвратно-поступательного перемещения магнитных головок вдоль носителя, выполненным в виде трехзвенного кулачкового механизма с поступательным движением толкателя С роликом, в этом варианте магнитные головки установлены на совершающей возвратно-поступательное перемещение платформе 14 на одинаковом расстоянии между соседними головками. Платформа 14 жестко связана с толкателем 15 с роликом 16, который касается кулачка. Кулачок 17 приводится во вращение от двигателя Ю проволокопротяжного механизма через редуктор 13. Работа устройства происходит следующим образом. Проволокопротяжный механизм осуществляет перемещение носителя б с линейной скоростью N/ц в,направлении показанном на фиг. 3 стрелками. Платформа 14 при вращении кулачка 17 перемещается со скоростью Vj- () вдоль носитепя в направлении движения носителя. Носитель б движется относительно магнитных головок со скоростью NO , равной разности Vf ), при этом происходит регистрация параметров на носитель. Движение платформы 14 по направлению движения, носителя 6 происходит до тех пор, пока каждый параметр не будет зарегистрирован на участке носителя, равном по длине расстоянию между соседними головками. После этого кулачковый механизм резко перемещает платформу в противоположном направлении в исходное голржение. После этого головки 1-4 соприкасаются со свободными от записи участками носителя. Если приближенно считать воз- / врат платформы мгновенным, то для обеспечения непрерывности регистрации и .полного заполнения носителя необходимо, чтобы выполнялись соотношения,
Д® fi - число , параметров и срответствеино число головок. Размах перемещения платформы 14 должен составлять (п -I) t , цикл перемещения платформы 14 должен составлять у- .
Формула изобретения
Источники информации, принятые во внимание Щ)и эйспертизе
№ 352311, кл:СИ В 15/62 (прототип). а
(ОТ
Н 1 г 3 ч
/л
(-5 3 f 2 В
т
т
S ii SMEOnHHlMZ
(.
2 Ъ ч
шшшижма
Фиг.2
