1
Изобретение относится к геодезическому приборостроению и предназначено для производства нивелирования гидростатическим методом.
Известны гидростатические нивелиры, обеспечивающие дистанционный съем информации 1 - 3. Однако они не позволяют автоматически регулировать положение объектов.
Наиболее близким по технической сущности и достигаемому результату к пред1лагаемому является tги ocтaтическое устройство, позволяющее корректировать положение наблюдаемого оборудования по высоте в процессе его эксплуатации. Это устройство содержит опорную и измерительную головки, электрически связанные с домкратными устройствами и шаговыми двигателями, а также элементы автоматики и кодирующий диск. Кодирующий диск механически связан с домкратом объекта 4.
Недостаткиданного устройства заключаются втом, что для его работы обязательно требуются измери-; тельные головки, дающие информацию С) положении уровня жидкости или, иначе, о прррмещенин фиксирующего .к-мшта в них до момента контакта
с уровнем в импульсном коде, а также необходимости присутствия оператора, дающего команду на циклические измерения и регулировку положения объектов.
Цель изобретения - упрощение конструкции устройства и обеспечение автоматической регулировки положения объектов постоянно.
0
Цель достигается тем, что в гидростатическом гивелире, содержащем заполненные жидкостью сообщающиеся сосуды с фиксированными точками, взаимодействующими с датчиками перемещений, кинематически соединенными с объектами и электрически - с устройством для регулирования положения объектов, каждый из сообщающихся сосудов соединен с объектом с помощью
0 пружины.
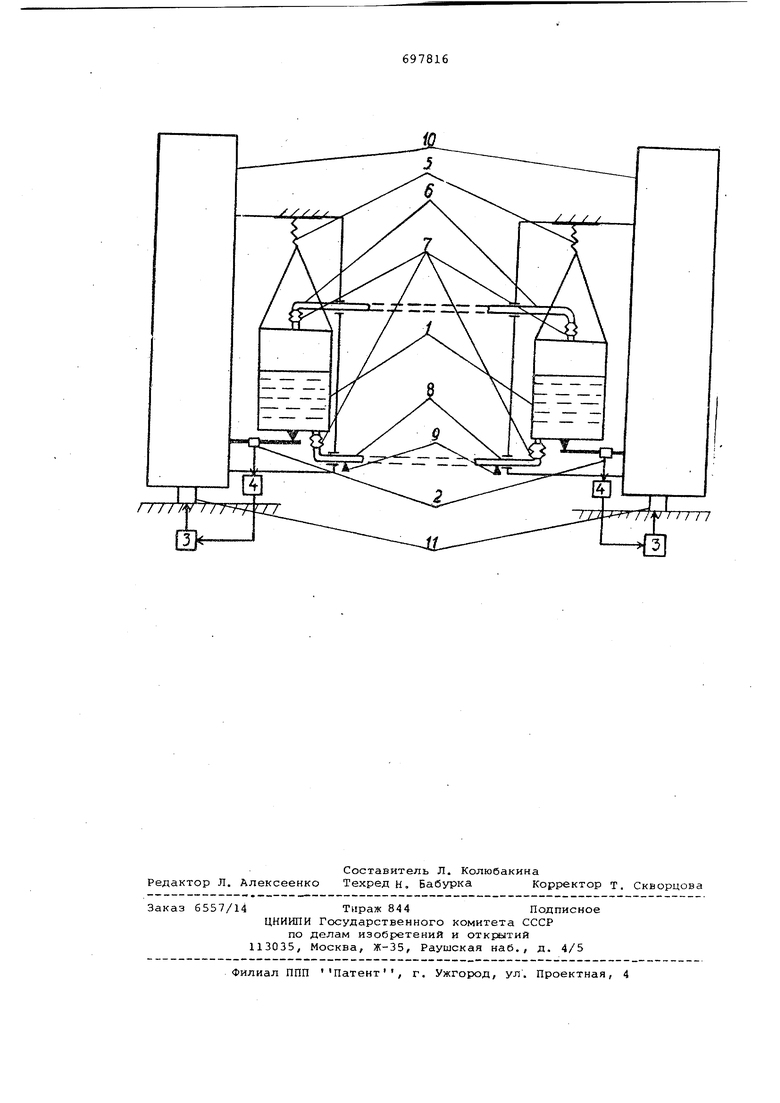
На чертеже приведена принципиальная схема гидростатического нивелира.
Устройство содержит сообщающиеся сосуды 1, частично заполненные жид
5 костью,датчики 2 перемещений,электродвигатели 3, усилители 4 постоянного тока, пружины 5, воздушные шланговые соединения 6, мягкие соединения 7, жидкостныешланговые соединения 8,
0 подставки 9 под шланговые coeдиF oния ,
юстируемье объекты 10 и домкратные устройства 11 для.регулирования положения объектов.
Сосуды 1 связаны между собой воздушным б и жидкостным 8 шланговыми соединениями, установленными на подставках 9,
Сосуды соединены с объектами 10 наблюдения через пружины 5.
Ыпанги 6,8 имеют мягкие соединения 7. Датчики перемещений 2 взаимодействуют с фиксированными точками сосудов и электрически связаны с электродвигателями 3 домкратных устройств 11 через усилители 4 постоянного тока.
Устройство работает следующим образом.
При изменении положения одного из объектов в сообщающихся по воздухуi и по жидкости сосудах 1 изменяется no ложение уровня жидкости по законам гидростатики.При этсм,благодаря наличию пружин 5,на которых сосуды подвешны к наблкщаемьм объектам 10, изменяются и положения фиксированных точек в днищах сосудов, взаимодействующих с датчиками 2 перемещений. Датчики перемещений (например, индуктивные, емкостные, механотронные) генерируют сигналы, полярность которых зависит от направления смещения фиксированной точки сосуда.Полярност сигналов датчиков разных сосудов противоположна. Эти сигналы являются управляющими для электродвигателей домкратных устройств 11 объектов 10. Они поступают на электродвигатель через усилитель 4 тока.
Домкратное устройство приводит вс систему в исходное положение. Таким образом, при смещении одного из объектов работают оба домкратных устройства до тех пор, пока оба объекта не возвратятся в исходное горизонтальное положение. Устройство работает не по команде оператора, а постоянно автоматически.
Для устранения влияния воздушного 6 и. жидкостного 8 шлангов на работу системы устройство содержит гибкие соединения 7, а сами шланги устанавливаются стационарно на подставках 9 При соответствующем подборе параметров пружин можно увеличить чувствительность устройства и, при условии равенства веса сосудов и равноценности характеристик пружин, иметь три положения равновесия - два устойчивых и одно неустойчивое, причем последнее является основным (раоочим). При этом положении вес жидкости в одном сосуде равен весу жидкости э другом, а датчики посылают н усилители постоянного тока сигналы, равные нулю. При отсутствии внешних воздействий система может находиться в таком состоянии как угодно долго.
Если один из объектов изменяет свое положение по высоте, согласно законам гидростатики, жидкость перетекает из одного сосуда в другой, нарушается равновесие системы. При этом срабатывают пружины. Результатом этого процесса является переход |:истемы в одно из состояний устойчивого равновесия. Наличие датчиков, управляющих домкратами, исключает этот переход. Сигналы,-, поступающие на усилители постоянного тока и управляющие электродвигатели, позволяют постоянно возвращать систему в исходное состояние неустойчивого равносия. Порог срабатывания системы определяется чувствительностью пружин. В устройстве можно использовать датчики, позволяющие регистрировать лишь знак перемещения оборудования, а не его величину. Возможно юстирование целой группы элементов оборудования.
Устройство предназначено для использования, например, на ускорителях заряженных частиц, на антенных комплексах и других аналогичных объектах, где требуется корректировка положения оборудования в процессе эксплуатации.
При использовании устройства отпадает необходимость присутствия оператора, так как система работает автоматически; не требуется применения сложных измерительных головок, дающих информацию в дискретном коде из системы исключаются узлы автоматики: шаговые двигатели, кодирующий диск, коммутатор, счетчик числа полных оборотов кодирующего диска и другие.
Формула изобретения Гидростатический нивелир, содержащий заполненные жидкостью сообщающиеся сосуды с фиксированнь ми точкам взаимодействующими с датчиками перемещений, кинематически соединенными с объектами и электрически - с устройством для регулирования положения объектов, отличающийся тем, что, с целью упрощения конструкции и обеспечения автоматической регулиРрвки положения объектов постоянно, каждый из сообщающихся сосудов соединен с объектом с помощью пружины.
Источники информации, принятые во внимание при-экспертизе
1-. ВаСютйнский И.Ю. Гидростатическое иивелиройание, М., Недра, 1976, с. 13-1-135.
2. Автбрское свидетельство СССР 241715, KJ-i. G 01 F 23/28, 1967.
3-. Авторское свидетельство СССР 3254S9, кл. G 01-С 9/18, 1970.
4. Авто-рское свидетельство СССР № 409069, кл. G 01 С 5/04, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСТАТИЧЕСКИЙ НИВЕЛИР | 1973 |
|
SU409069A1 |
| Гидростатический нивелир | 1980 |
|
SU964442A1 |
| Гидростатический нивелир | 1974 |
|
SU499494A1 |
| Гидродинамический нивелир | 1979 |
|
SU800635A1 |
| ДИНАМИКО-СТАТИЧЕСКИЙ ЖИДКОСТНОЙ НИВЕЛИР | 2005 |
|
RU2303764C2 |
| Гидростатический нивелир | 1977 |
|
SU734505A1 |
| ГИДРОСТАТИЧЕСКИЙ НИВЕЛИРI/ 1..! t., • ;,-••»>& блхг оттРч ЛI;; лТ" ^':'••"!^f^! тг:уг;'гг?"^г,31:>&; I !, •-.;;..,i.j.'=?.Ai;i. ii:UJarlrf=I '^^-:::ЛИOT;?HЛ : | 1971 |
|
SU318813A1 |
| Гидростатический нивелир | 1982 |
|
SU1052863A1 |
| Гидростатическая система для определения взаимного положения объектов | 1981 |
|
SU960529A1 |
| Гидростатический нивелир | 1987 |
|
SU1530895A1 |