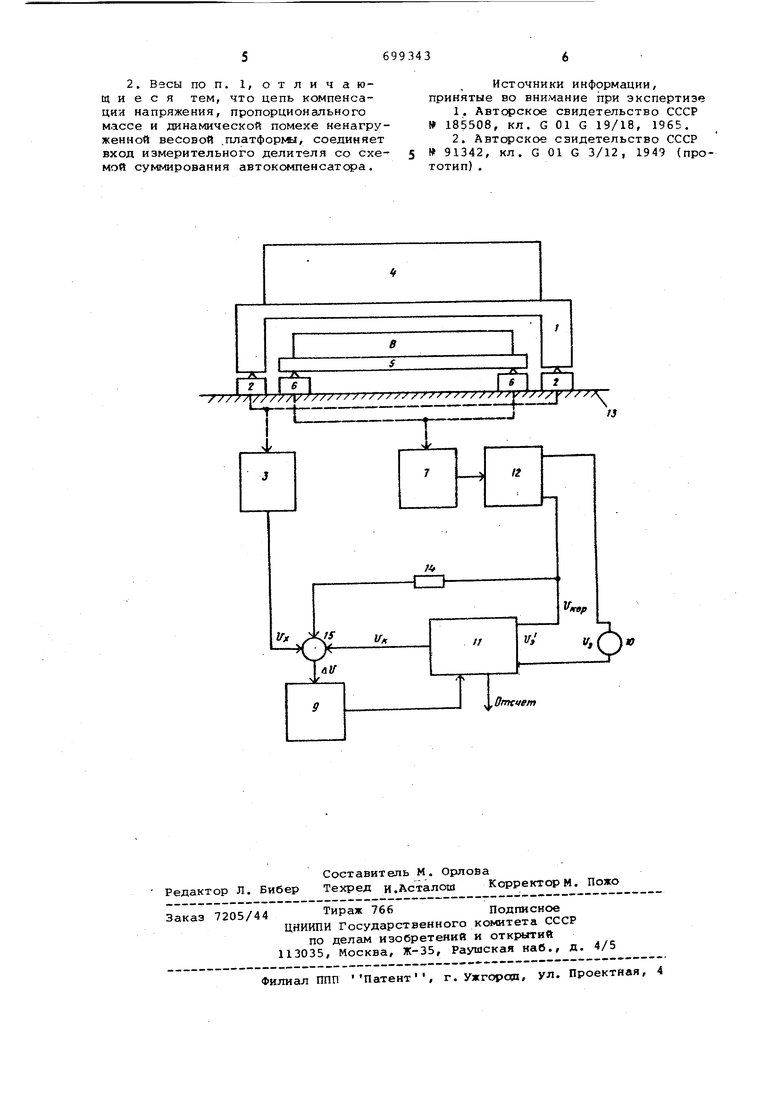
(54) ТЕНЗа ЕТРИЧЕСКИЕ ПЛАТФОРМЕННЫЕ ВЕСЫ делителя со схемой суммирования авто компенсатора. На чергеже схематически изображена функциональная схема описываемых весов. На весовую платформу 1, опирающую |ся на тензодатчики 2, собранные в сх му электрического моста 3, накладывается взвешиваемый груз 4, а дополнительная платформа 5, опирающаяся на -тензодатчики 6, собранные в схем электрического моста 7, нагружена по тоянной массой 8, Автокомпенсатор (аналоговый или цифровой), измеряющий напряжение на выходе моста 3, состоит из нуль-органа 9, источника эталонного напряжения и измерительного делителя 11 напряжения со своей схемой автоматического набора компенсирующего напряжения V, Сигнал с выхода электрического моета 7 через узел согласования 12 с ни коомным выходом подается в виде напряжения коррекции UKOP последователь но в цепь источника эталонного напряжения и. Тензодатчики 2, 6 связаны по основанию 13 весов и питаются от того же источника, что и источник этгшонного напряжения (на чертеже не показано). Устройство имеет регулятор и схему суммирования. Работа весов происходит следующим образом: предварительно в статике при горизонтальном положении основания 13 весов тензодатчики 6, нагруженные постоянной массой 8, балансируются на нуль ( 0), а си нал на выходе моста 3 ипк от действи на тензодатчики 2 массы ненагруженной платфоркы 1 компенсируется напряжением , котс« ое уста навливается регулятс ом 14, где (Ькоэффициент передачи от источника эталонного нафяжения на вход схемл суммирования 15. Значение коэффицие та передачи р является величиной постоянной для конкретных.весов и устанавлива1ется при наладке и калибровке весов. Для простоты органы балансировки на нуль -тензодатчиков 3 и 7 на чертеже не показаны. В статических условиях при горизонтальном положении весовой платформй 1 накладывают груз Р , Выход ное напряжение , пропорциональное массе груза Р , компенсируется напряжением U, , автоматически вырабатываемым измерительным делите лем 11, где - коэффициент делени эталонного напряжения, численно пок зывающий массу груза Р,. Таким обра зом Цф + Un KjtpU + .Отсюда ел дует, ftгo показанив массы груза Рц будет равно При отклонении основания весов т горизонтального положения сигнаы на.выходе тензодатчиков 2 и б зменятся (например, от разложения авнодействуюадих сил или от действия нерционных сил на платфорьи с грузами) и станут равными ()(). t.. где - приращения напряжений одинакового знака, пропорциональные массе взвеишваемого груза 4, ассе весовой платформы 1 и постоянной массе на дополнительной платформе 5 соответственно. Ненулевой сигнал подается через узел согласования 12 (масштабирующий усилитель) последовательно в цепь эталонного напряжения Ug в виде напряжения коррекции ±и,ор в той же фазе, что и фаза приращений , bU,, по отнсяиению к сигналам у, и U, , Относительная веустанавливается равной личинг относительным величинам ... V r,путем соответствующего изменения коэффициента передачи узла согласования 12. В этих условиях, напряжение с выхода тензомоста 3 (Ux,p + ипл)(1 ±(4) будет скомпенсировано напряжением (KxpU PUg) (1 t f) при новом зна1ёнии коэффициента деления эталонного напряжения U(l ±fj} , учитывающем изменение измеряегллх напряжений. Следовательно, численное значение массы груза Р будет равно -J0. Так как к;р , то из показаний:автокомпексатора будут исключены погрешности, вызванЯйё наклоном основания весов или действием инерционных сил. Формула изобретения 1. Тензометрические платформенные ;ы, содержащиевесовую платформу,. опирающуюся на весовые тензодатчики, автокомпенсатор, состоящий из схели суммирования, нуль-органа,измерительного делителя, схемы электрического моста, источника эталонного напряжения, и цепь ксяйпенсации напряжения, отличающиеся тем, что, с целью повьааёния точности взвешивания, они снабжены корректором сшибок, выполненным в виде дополнительной платформы, идентичной весовой платформе, нагруженной эталонной массой и опираюв ейся на тензодатчики, включенные через схему электрического моста, и узлом согласования включенного в цепь эталонного напряжения, причем обе платформы связаны между собой основанием весов.
2. Вэсы по п. 1, отлича ющ и е с я тем, что цепь компенсации напряжения, пропорционального массе и динамической помехе ненагруженной весовой ,плaтфop вJ, соединяет вход измерительного делителя со схемой суммирования автокомпенсатс)а.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 185508, кл. G 01 G 19/18, 1965.
2.Автс ское свидетельство СССР
91342, кл. G 01 G 3/12, 1949 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания в условиях колебания грузов | 1977 |
|
SU765662A1 |
| ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1965 |
|
SU173449A1 |
| БЕСКОНТАКТНЫЙ ПРИБОР ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ | 1966 |
|
SU188056A1 |
| Змерительный прибор для тензометрических весов | 1977 |
|
SU619800A1 |
| Весоизмерительное устройство | 1979 |
|
SU830136A1 |
| Цифровое тензометрическое устройство | 1983 |
|
SU1137322A1 |
| БЕСКОНТАКТНОЕ ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИЗМЕРЕНИЙ | 1967 |
|
SU191844A1 |
| Способ цифровой фильтрации периодических помех в тензометрических весах и тензометрическое устройство с цифровой фильтрацией периодических помех | 1980 |
|
SU932256A1 |
| Устройство для взвешивания в условиях колебания груза | 1983 |
|
SU1142738A1 |
| Цифровое устройство управления весовым дискретным дозированием | 1980 |
|
SU932258A1 |
