Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания в условиях колебания грузов (на плавучих транспорт-5 ных средствах, на кранах и т.п.).
Известное устройство, содержащее основные и дополнительные силопреобразователи не обеспечивает необходимой точности взвешивания l .10
Наиболее близким по технической сущности к предлагаемому является устройство для взвешивания в условиях колебания грузов, содержащее автокомпенсатор, состоящий из последователь- 5 но включенных входной цепи, нуль-органа, выходного узла, делителя, выход которого включен на вход входной цепи, блок основных и блок дополнительных силопреобразователей, согласук1дий20 СПОКL23 ,
Недостатками устройства являются сравнительна низкая, точность измерения и сложность в изготовлении и эксплуатации.25
Цель изобретения - повышение точности измерения и упрощение конструк ии.
Для достижения этой цели в устройС1ВО введены узел суммирования и де- jg
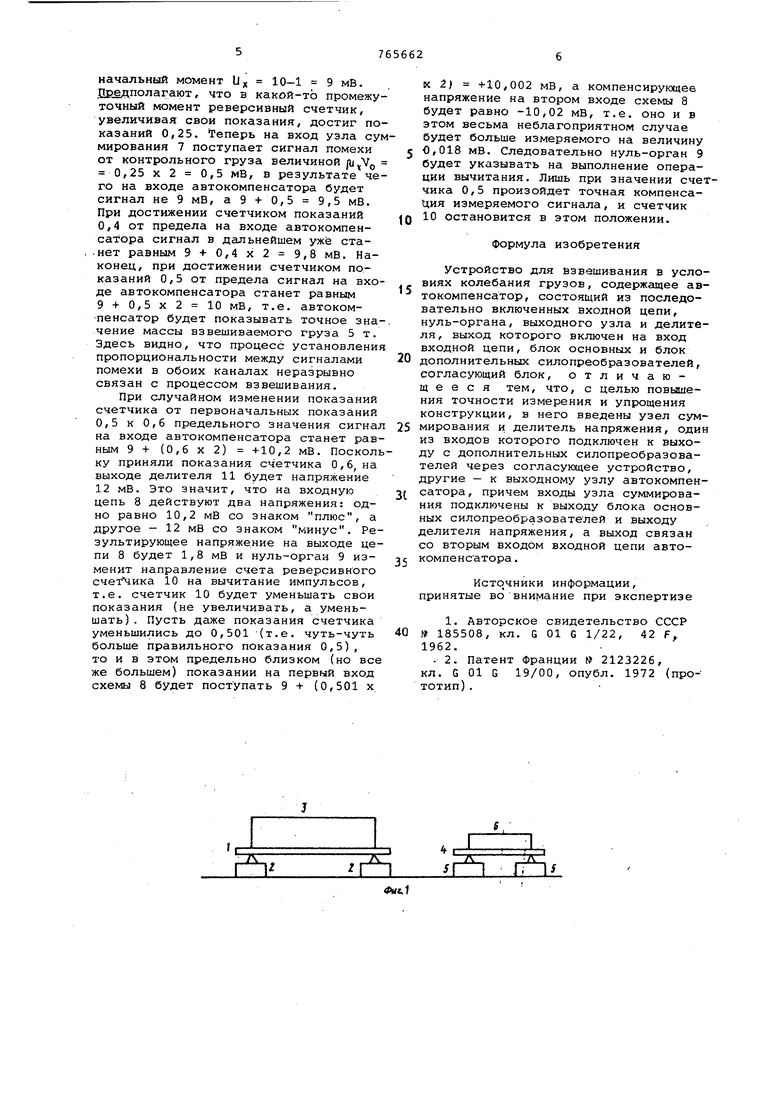
литель напряжения, один из входов которого подключен к выходу с дополнительных силопреобразователей через согласующее устройство, другие - к выходному узлу автокомпенсатора, причем входы узла суммирования подключены к выходу основных силопреобразователей и выходу делителя напряжения, а выход связан со вторым входом входной цепи автокомпенсатора. На фиг. 1 приведена конструкция предлагаемого устройства; на фиг, 2 - его блок-схема .
Устройство имеет весовую платформу 1, опирающуюся на основные (измерительные) силопреобразователи 2 (например, тензорезисторные силопреобразователи) , на которые наложен измеряемый груз 3 неизвестной массы т. Дополнительная платформа 4, опирамдаяся на силопреобразователи 5 (аналогичные силопреобразователям 2), нагружена контрольным грузом б с постоянной массой тд. В статических условиях силопреобразователи 5 с наложенным на платформу грузом балансируются на нуль выходного напряжения. Выход силопреобразователей 2 подключен к одному из входов узла суммирокания 7, выход которого, связан с автокомпенсатором (выделен на фиг. 2 пунктирной линией) . Автокомпе.нсатор состоит из входной цепи 8, нуль-орга на 9, выходного узла, выполненного, например, в виде реверсивного счетчи ка 10 и измерительного делителя 11, который вырабатывает компенсирующее напряжение 13 , пропорциональное мас се m у взвешиваемого груза 3. Вход делителя напряжения 12 соединен с вы ходом дополнительных силопреобразова телей 5 через согласующее устройство 13, а его управляющие входы соединены с реверсивным счетчиком 10 выходного узла автокомпенсатора. Кроме то го, выход делителя напряжения подклю чен к второму входу узла суммирования 7. Силопреобразователи 2 и. 5 жес ко связаны между собой (например, по основанию весоизмерительного устройства) , в связи с чем два груза 3 и 6 испытывают одинаковые возмущения в динамике перемещения основания весов Устройство работает следующим образом. В условиях колебания основания несов под действием взвешиваемого груза 3 массой ту на выходе основных силопреобразователей 2 возникает напряжение- llx ±AUj(, состоящее -из постоянной составляющей пропорциональной массе m X и ускорению свободного падения, и составляющей динамической помехи +AUx, которая также пропорциональна: массе т и, например ускорению колебательного движения основания весов. Полученное напряжение можно выразить через параметры весов и,(иаи„„±;и„„), где Ufij, и t и пн постоянная и переменная составляющие напряжения, соответствующие предель ной нагрузке на платформе 1 грузом массой m Uxo AU) jU;,«-- коэффициент нагруз пк пн ки весов, изменяющийся от нуля (весы разгружены) до единицы (предельная нагрузка на весы), На выходе дополнительных силопреобразователей 5 в этих же условиях колебания основания весов возникает напряжение помехи +Uo пропорциональное воздействию контрольного груза 6 с постоянной массой т из-за ускорения колебательного движения основания весов. Это напряжение подается через согласующее устройство 13 на делитель 12 и делится пропорционально массе m взвешиваемого груза 3 до значения ±лОо , поскольку делитель 12 связан с реверсивным счетчиком 10 выходного узла автокомпенсатора, показания которого в данном случае соответствует взвешиваемому грузу массой m . Затем выходное напряжение делителя суммируется в узле суммироваНИН 7 с выходным напряжением основных силопреобразователей 2 в противофазе Помехе ± д U ,( . Следовательно, напряжение, поступающее с выхода узла суммирования 7 на входные цепи 8 автокомпенсатора, будет равно U,U,ot4Ux±|U,AUo Ux-U,otfU,(). Для подавления динамических помех в напряжении U , поступаквдем на вход автокомпенсатора, при любых массах т,( взвешиваемого груза 3 необходимо выполнить условие uDf, , что легко достигается при установочной регулировке коэффициента передачи согласующего устройства 7. Из последнего выражения следует, что при изменении , от нуля до единицы, т.е. при взвешивании грузов по .всему диапазону нагрузок весов, на вход автокомпенсатора поступает только постоянная составляющая напряжения Ux Uxo6e3 -составляющей динамической помехи. Ниже приведен процесс взвешивания на численном примере. Предполагают, что весы рассчитаны на предельную нагрузку 10 т, а масса взвешиваемого груза составляет 5 т, т.е. равна половине предельного показания весов. Весы установлены на судне, имеющем такой крен, что .наклон основания весов приводит к занижению показания весов на 10%. До установки груза на весовую платформу показания автокомпенсатора были равны нулю, коэффициент передачи их делителя 12 также был равен нулю. При установке груза На платформу 1 на выходе основных силопреобразователей 2 появляется, например, полезный сигнал величиной U X 10 и динамическая помеха (из-за крена судна) величиной 1 мВ (знак помехи отрицательный, так как весы занижают показания). В тракте контрольного груза всегда сущест:вует сигнал помехи из-за крена судна и его величина уже на да существует сигнал помехи из-за крена судна и его величина уже на выходе делителя 12 могла бы составить UQ 2 мВ, еслибы .реверсивный счетчик 10 автокомпенсатора был полностью ааполнен. Но так как до установки груза на платформу показания счетчика пока равны нулю, на выходе делителя 12 сигнал помехи тоже будет равен нулю (/U X О) . Теперь груз установили на платформу, и реверсивный счетчик начал заполняться , и начался процесс компенсации сигнала на выходе узла суммирования 7 сигналом И к , снимаемым с вы хода измерительного делителя 11. В
начальный момент 11 10-1 9 мВ. ДР-ёДполагают, что в какой-то промежуточный момент реверсивный счетчик, увеличивая свои показания, достиг показаний 0,25. Теперь на вход узла суммирования 7 поступает сигнал помехи от контрольного груза величиной , 0,25 X 2 0,5 мВ, в результате чего на входе автокомпенсатора будет сигнал не 9 мВ, а 9 +0,5 9,5 мВ. При достижении счетчиком показаний 0,4 от предела на входе автокомпенсатора сигнал в дальнейшем уже станет равным 9+0,4x2 9,8 мВ. Наконец, при достижении счетчиком показаний 0,5 от предела сигнал на входе автокомпенсатора станет равным 9 + 0,5 X 2 10 мВ, т.е. автокомпенсатор будет показывать точное значение массы взвешиваемого груза 5 т. Здесь видно, что процесс установления пропорциональности между сигналами помехи в обоих каналах неразрывно связан с процессом взвешивания.
При случайном изменении показаний счетчика от первоначальных показаний 0,5 к 0,6 предельного значения сигнал на входе автокомпенсатора станет равным 9 + (0,6 X 2) +10,2 мВ. Поскольку приняли показания счетчика 0,6, на выходе делителя 11 будет напряжение 12 мВ. Это значит, что на входную цепь 8 действуют два напряжения: одно равно 10,2 мВ со знаком плюс, а другое - 12 мВ со знаком минус. Результирующее напряжение на выходе цепи 8 будет 1,8 мВ и нуль-орган 9 изменит направление счёта реверсивного счетчика 10 на вычитание импульсов, т.е. счетчик 10 будет уменьшать свои показания (не увеличивать, а уменьшать) . Пусть даже показания счетчика уменьшились до 0,501 (т.е. чуть-чуть больше правильного показания 0,5), то и в этом предельно близком (но все же большем) показании на первый вход схемы 8 будет поступать 9 + (0,501 х
к 2) +10,002 мВ, а компенсирующее напряжение на втором входе схемы 8 будет равно -10,02 мВ, т.е. оно и в этом весьма неблагоприятном случае будет больше измеряемого на величину 0,018 мВ. Следовательно нуль-орган 9 будет указывать на выполнение операции вычитания. Лишь при значении счетчика 0,5 произойдет точная компенсация измеряемого сигнала, и счетчик 10 остановится в этом положении.
Формула изобретения
Устройство для Ёзвешивания в условиях колебания грузов, содержащее автокомпенсатор, состоящий из последовательно включенных входной цепи, нуль-органа, выходного узла и делителя, выход которого включен на вход входной цепи, блок основных и блок дополнительных силопреобразователей, согласующий блок, отличающееся тем, что, с целью повышения точности измерения и упрощения конструкции, в него введены узел суммирования и делитель напряжения, один из входов которого подключен к выходу с дополнительных силопреобразователей через согласующее устройство, другие - к выходному узлу автокомпенсатора, причем входы узла суммирования подключены к выходу блока основных силопреобразователей и выходу делителя напряжения, а выход связан со вторым входом входной цепи автокомпенсатора.
Исто чники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 185508, кл. G 01 G 1/22, 42 F, 1962.
- 2. Патент Франции № 2123226, кл. G 01 G 19/00, опубл. 1972 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензометрические платформенные весы | 1976 |
|
SU699343A1 |
| Змерительный прибор для тензометрических весов | 1977 |
|
SU619800A1 |
| Весоизмерительное устройство | 1979 |
|
SU830136A1 |
| БЕСКОНТАКТНЫЙ ПРИБОР ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ | 1966 |
|
SU188056A1 |
| Способ цифровой фильтрации периодических помех в тензометрических весах и тензометрическое устройство с цифровой фильтрацией периодических помех | 1980 |
|
SU932256A1 |
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1965 |
|
SU173449A1 |
| Цифровое тензометрическое устройство | 1983 |
|
SU1137322A1 |
| КРАНОВЫЕ ВЕСЫ | 1971 |
|
SU301555A1 |
| Цифровой тензопреобразователь | 1985 |
|
SU1303836A1 |

S
г
тл
