(54) УСТАНОВКА ДЛЯ РАЗДАЧИ КОРМОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для раздачи кормов | 1978 |
|
SU791353A2 |
| Кормораздатчик для животноводческих помещений | 1985 |
|
SU1311682A1 |
| Установка для раздачи кормов в животноводческих помещениях | 1986 |
|
SU1380695A1 |
| Устройство для раздачи жидких кормов | 1985 |
|
SU1308290A1 |
| Установка для кормления животных | 1982 |
|
SU1088682A1 |
| УСТРОЙСТВО ДЛЯ РАЗДАЧИ КОРМОВ | 1992 |
|
RU2044475C1 |
| Устройство для управления дозированной раздачей кормов | 1987 |
|
SU1428324A1 |
| Установка для раздачи кормов в животноводческих помещениях | 1988 |
|
SU1611291A1 |
| Установка для раздачи кормов | 1984 |
|
SU1162390A1 |
| Мобильное средство для раздачи кормов в животноводческих помещениях | 1989 |
|
SU1644846A1 |
1
Изобретение относится к устройстввм ОЛЯ раздачи кормов, используемым на Животноводческих фермах
Известны установки д/ш раздачи кор мов, содержащие nepeMemaeNryia перпен дакулярно относительно Kop vOMeK посредством мёХахшзма привода платформу с поперечно установленным на ней мобиль™ ным кормораздатчиком 1.
i Недостатками таких установок являются низкая производительность и сло5к-« ный процесс раздачи кормов, так как в них не предусмотрено устройство для автоматического утгравления движением мобильного кормораздатчика от механиз ма привода платформы.
Целью изобретения является повыше ние производительности и упрощение процесса раздачи кормов.
Это достигается тем, что механизм привода платформы выполнен в виде сблокированных между собой двух барабанов, один из которых соединен с колесами ллатЬормы, а другой снабжен тормозом. Ведущие
колеса мобильного кормораздатчика размещены на упокянутых барабанах и к нему прикреплен зацеп. Установка снабжена устройством для автоматического управ™ ления движением мобильного корморазда-р чика, имеющим Гввд шарнирно закрепленных на платформе своими концами и сое диненных между, собой тягой двух рычагов, один из которых подпружинен и выполнен вильчатым, а другой посредством дополнительной тяги и кривощипного вала соединен с тормозом механизма при« вода платформы и имеет на конце пово- ротный кулачок с двумя роликами, вза-. имодействующий верхней частью с заце- пом. Платформа имеет пазы для роликов новоротного кулачка, расположенные в крайних точках траектории его движения, под которыми установлены подпружиненные плиты. На пути-движения платформы у кормушек закреплены упоры, взаимодей«. ствующие с вильчатым рычагом.
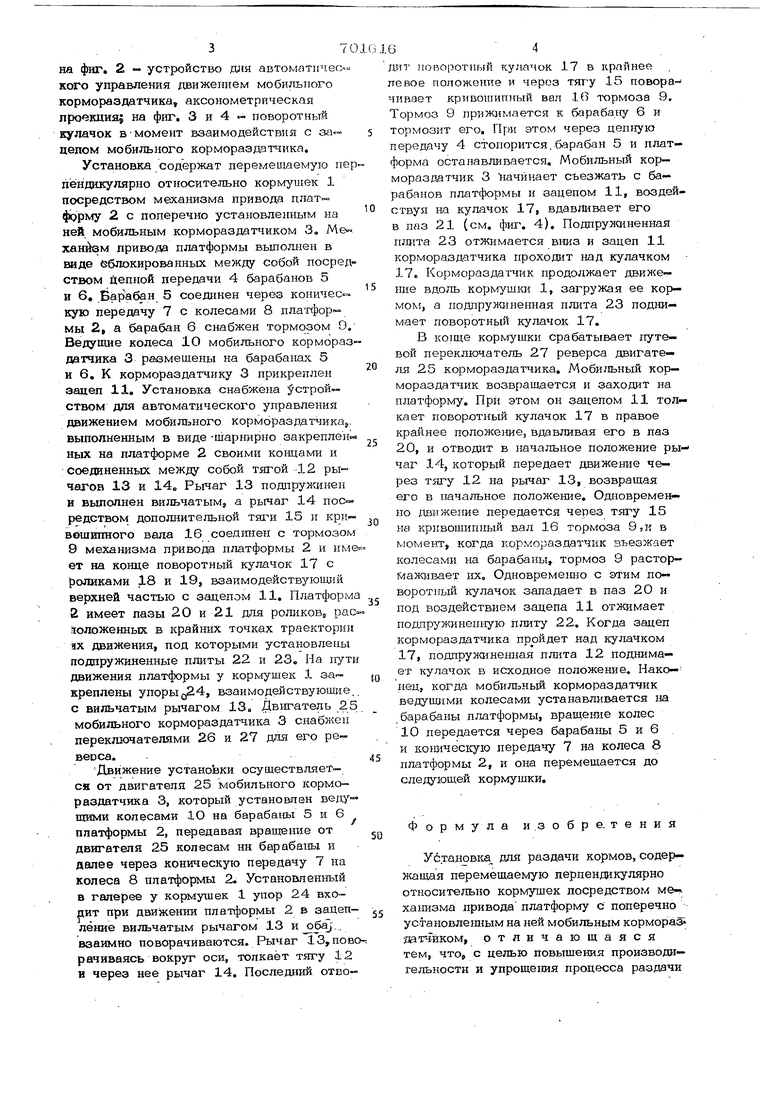
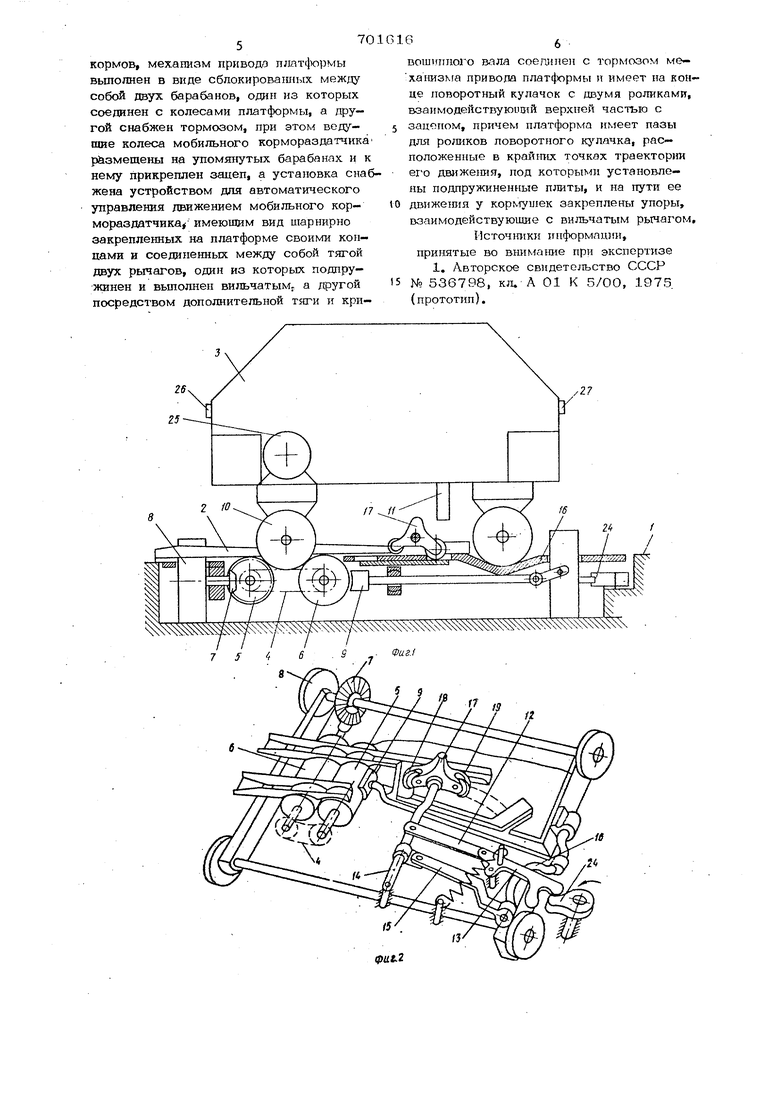
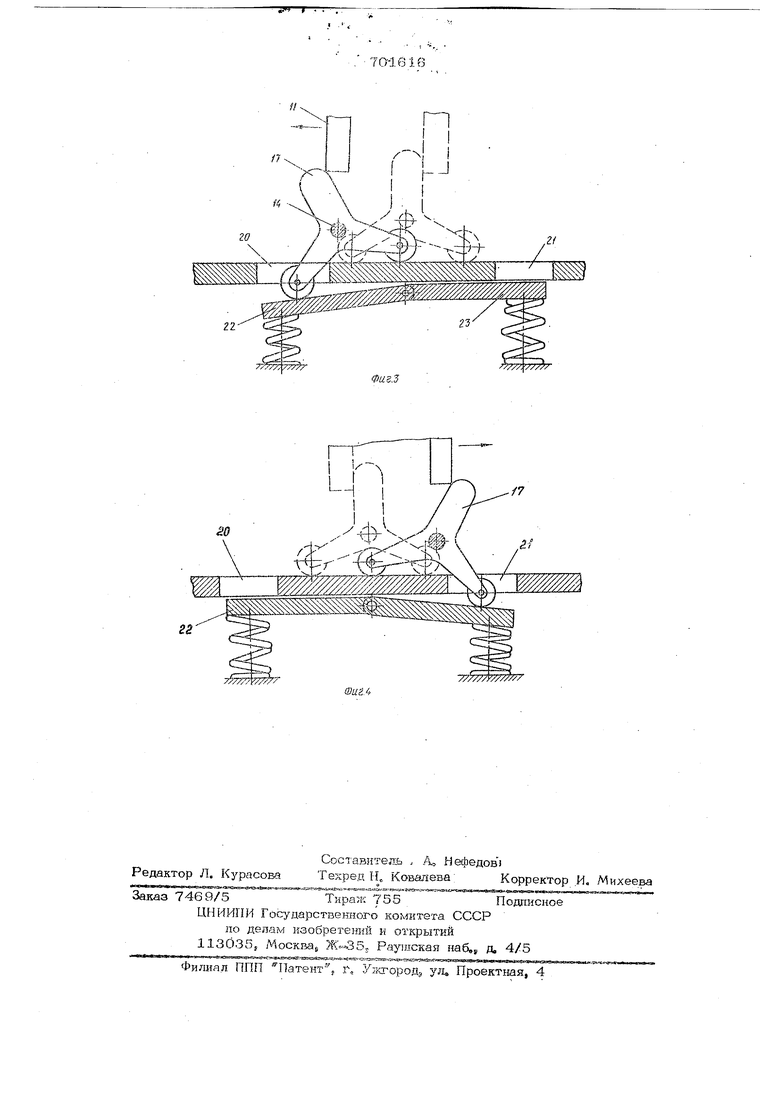
На фиг. 1 схематично изображена установка для раздачи кормов, вид сбоку; . -37 на фиг, 2 - устройство для автоматпчеокого управления движением мобильного кормораздатчика, аксонометрическая проекция; на фиг, 3 и 4 поворотный кулачок в момент взаимодействия с цепом мобильного кормораздатчика. Установка содержат перемещаемую пе пендикулярно относите,пьно кормушек 1 посредством механизма привода ппат форму 2 с поперечно установленным на ней мобильным кормораздатчиком 3, Ме хапйзм привода платформы вьшолнен в виде еблокированных между собой посред ством цепной передачи 4 барабанов 5 и 6, Барабан 5 соединен через коничео кую передачу 7 с колесами 8 ллап юр мы 2, а барабан 6 снабжен тормозом 9. Ведущие колеса 10 мобильного кормораз датчика 3 равмещенв) на барабанах. 5 и 6. К кормораздатчику 3 прикреплен зацеп 11, Установка снабжена строй ством для автоматического управления движением мобильного кормораздатчика выполненным в виде -шарнирно закреплен ных на платформе 2 своими концам 1 и : соединенных между собой тягой 12 рычагов 13 и 14. Рычаг 13 подпружинен и вьтолнен вильчатым, а рычаг 14 нос™ редством дополнительной 15 и крнвешипного вала 16 соединен с тормозом 9 механизма привода платформы 2 и им ет на конце поворотный кулачок 17 с )оликами 18 и 19, взаимодействующий верхней частью с зацепом 11, Платформ 2 имеет пазы 20 w. 2.1. для роликов, рас доложенных в крайних точках траектории ах движения, под которыми установлены подпружиненные плиты 22 и 23. На пут движения платформы у кормушек 1 за™ креплены упоры 24, взаимодействуюшие с вильчатым рычагом 13. Двигатель 25 мобильного кормораздатчика 3 снабжен переключателями 26 и 27 для его ревеоса. Движение установки осуществляет™сн от двигателя 25 мобильного кормораздатчика 3, который устаноншен ведущими колесами Ю на барабаны 5 и 6 платформы 2, передавая вращение от двигателя 25 колесам нн бараба1: ы и далее через коническую передачу 7 на колеса 8 платформы 2. Установленный в галерее у кормушек 1 упор 24 входит при движении платформы 2 в зайеплёние вильчатым рычагом 13 .. взаимно поворачиваются. Рычаг 13, пов рачиваясь вокруг оси, толкает тягу 12 в через нее рычаг 14. Последний отвоит поворотный кулачок 17 в крайнее евое положение и чероз тягу 15 повораивает кривошипный вал 10 тормоза 9. ормоз 9 прижимается к барабану 6 и тормозит его. При этом через цепную ередачу 4 стопорится,барабан 5 и платорма останавливается. Мобильный кормораздатчик 3 начинает съезжать с ба рабанов платформы и зацепом 11, воздействуя на кулачок 17, вдавливает его в паз 21 (см, фиг, 4), Подпружиненная nwiTa 23 отжимается вниз и зацеп 11 кормораздатчика проходит над кулачком 17, Кормораздатчик продолжает движение вдоль корК1ушмя 1, загружая ее кормом, а подпруишиенная плита 23 поднимает поворотный кулачок 17, В ко1ще кормушки срабатывает путевой переключатель 27 реверса двигателя 25 кормораздатчика. Мобильный кормораздатчик возвращается и заходит на платформу. При этом он зацепом 11 толкает поворотный кулачок 17 в правое крайнее положение, вдавливая его в паз 20, и отводит в положение рычаг 14, который передает движе1-те через тягу 12 на рычаг 13, возвращая его в начальное положе1ше. Одновременно даижепие передается через тягу 15 на кривошипный вал 16 тормоза 9,к в MOMei-rr, когда кормораздатчик въезжает колесами на барабаны, тормоз 9 растормаживает их. Одновременно с этим поворотный кулачок западает в паз 20 и под воздействием зацепа 11 отжимает подпружинеп1-1ую плиту 22, Когда зацеп кормораздатчика пройдет над кулачком 17, подпружинешшя плита 12 поднимает кулачок в исходное положение, Нако- нец, когда мобильный кормораздатчик, ведушлми колесами устанавливается на барабаны платформы, вращение колес 10 передается через барабаны 5 и 6 и коШ1ческую передачу 7 на колеса 8 платформы 2, и она перемещается до следующей кормушки. Формула и,3 обре, тения Убтанрвка для раздачи кормов, содержащая перемещаемую перпендикулярно относительно кормушек посредством ме- ха1шзма привода платформу с поперечно установле1шым на ней мобильным кормораФ датчиком, отличающаяся тем, что, с целью повышения производительности и упроще1шя процесса раздачи
кормов, механизм привода гиют4юрмы вьшолнен в виде сблокированных между собой двух барабанов, один из которых соединен с колесами платформы, а другой снабжен тормозом, нри этом ведущие колеса мобильного кормораздатчика р&змещены на упомяотутых барабанах и к нему прикреплен задеп, а установка снабжена устройством для автоматического управления движением мобильного кормораздатчнка имеющим вид шарнирно закрепленных на платформе своими концами и соединенных между собой тягой двух рычагов, один из которых подпружинен и вьшолнен вильчатымг а другой посредством дополнительной тяги и кривошитюго вала соеглнен с тормозом ме- ханизкга привода платформы н имеет на кон це поворотный кулачок с двумя роликами, взаимодействуюишй верхней частью с зацепом, причем платформа имеет пазы дл5 pojniKOB поворотного К5лачка, расположенные в крайьшх точках траектории его движеюш, под которыми установлены подпружиненные плиты, и на пути ее движе1шя у кормушек закреплены упоры, взаимодействующие с вильчатым рычагом,
Мсточш ки информации, принятые во BHHMaiffle при экспертизе
SO
7O1616
Физ.З
Фи&4
