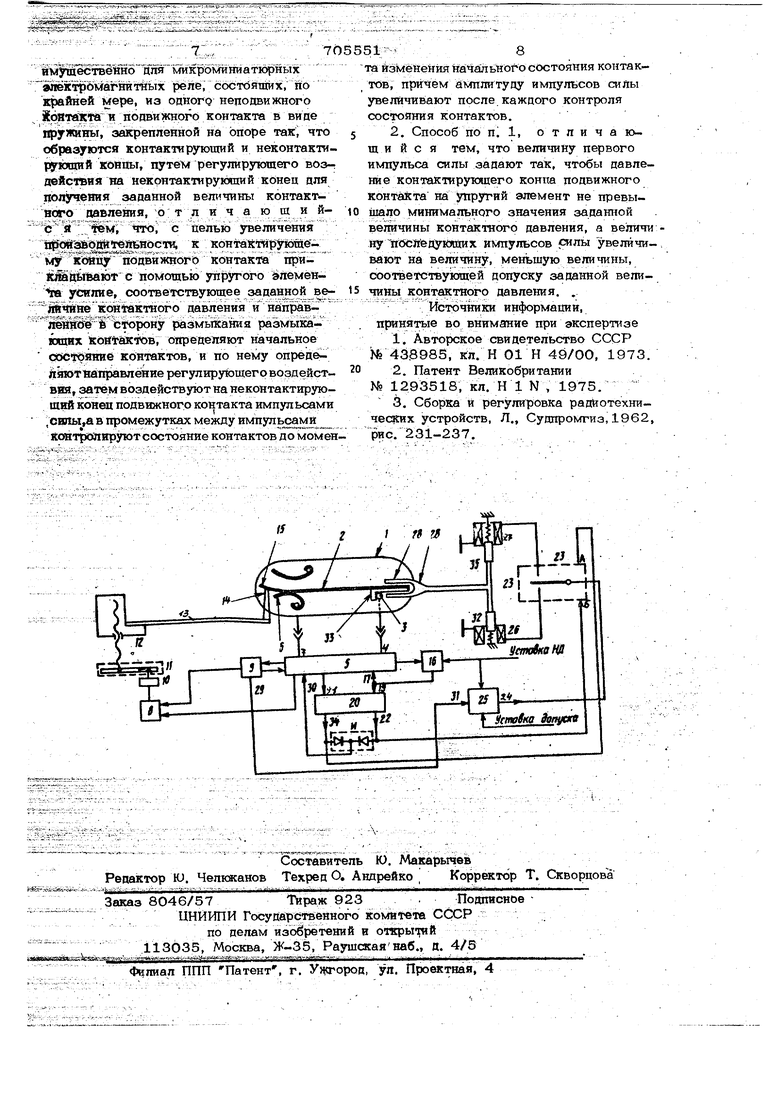
(54) СПОСОБ РЕГУЛИРОВАНИ Т КОНТАКТНОЮ ДАВЛЕНИЯ РАЗМЫКАЮЩИХ КбнТАКТб1В наличии большого опЪгта процесс регул ровки требует значительных затрат вре ШнегГ сс провбждаб ся излишними перегибами пружин и характеризуется низкой точностью регулировки З. Цель изобретения - повышение производительности (сокращение времени регулировочного цикла) и Точность регулирования контактного давления размыкающих контактов. Для этого к контактирующему концу ПОДВИЖНОГО контакта прикладывают с помощью упругого элемента усилие, соответствующее заданной величине контактногб давления и направленное в сторону рй;з1мыканий ра.змыкающих контактов, определяют начальное состояние контактов, по нему определяют направление регулирующего воздейс-геия, затем воздействуют на неконтактирующий конец подвижного контакта импульсами силы, а в промежути. ках между импульсами контролируют состо :яйИб онтактов до момента изменения начальйого состояния контактов, причем амплитуду импульсов силы увеличивают после каждого контроля состояния контактов. Целесообразно величину первого импуль са силы задавать тем, чтобы давление кбййжГтйр5гю1цег6 конца подвижного контак та на упругий элемент не превышало минкмального значения заданной величины контактнпго давления, а величину послеяукйгвх импульсов силы увеличивать на веянчину, мёйьшую величины, соответствукщей допуску заданной величины контактнего давления. На чертеже показано устройство, (бло ), в йотором во время его работы осущееггвпяется предложенный способ регулирования контактного давления микро :Мя:няатюрных реле, например реле типа РЭС-49. После установки цоколя репе 1 его ш пвижный контакт 2 выводом 3 оказывается, подключенным ко входу 4 основного блсжа 5 управления (ОБУ), а нешздвпжный контакт 6 оказывается подкяюченным к входу 7 ОБУ 5. После проверки контактирлва тия между контактами 2 и 6, а Также после нажатия кнопки Пуак (на чертеже не показана) операто ром 5 дает команду блоку 8 управленяи шаговым двигателем (БУШД), кото рый, вбШрйММая йШулЬсЬ от гШЙра бр 9 ймиульсов (ГИ), формирует токовые импульсы управления шаговым двигателем (ШД)10. Последний через редуктор 11 перемещает шагами каретку 12с закрепленным на ней упругим элeмeнтov 13 из ее исходного положения. На один импульс ГИ 9 каретка 12 шагает на 0,001 мм, при этом щуп 14, установленный на конце упругого элемента (У-Э), двигается в направлении размыкания контактов 2 и 6. Как только щуп 14 коснется контактирующего конца 15 подвижного контакта 2, ОБУ 5 по входам 4, 7 фиксирует этот момент, пропуская импульсы ГИ 9 на счетчик 16, а каретка 12 продолжает движение. Так как щуп 14 в момент касания конца 15 встречает сопротивление подвижногр контакта 2, дальнейшее, движение карелш 12 задает упругому элементу 13 деформацию в пределах упругих деформаций, при которых один импульс с ГИ 9 и соответствующее этому импульсу перемещение (шаг) каретки 12 изгибает УЭ 13 на величину деформации, развивающую на контактирующем конце 15 подвкжного контакта 2, также неко1Х)рое единичное приращение давления. Одновременно счетчик 16 вецет счет импульсов с ГИ 9 с момента каоания щупа 14, т.е. .счетчик ведетучет давления, которое путем деформации УЭ 13 через щуп 14 передают на контактирующий конец подвижного контакта. Емкость счетчика 16 регулируется, т.е. ее заранее устанавливают на заданную величину, Как только счетчик 16 отсчитает заданное ему число импульсов, он выдает .сигнал на вход 17 ОБУ 5, который по линии 18 останавливает генератор 9, и каретка 12 останавливается, т.е. деформация УЭ 13 прекращается, деформирующий его орган (каре-пса 12) фиксируется. Одновременно счетчик 16 подает сигнал на вход 19 логического элемента 20, который изменяет свое.состояние. ЕСЛИ во время задания давления контакты 6 и 2 разомкнулись до заполнения емкости счетчика на выходе 4 .ОБУ 5 исчезает заземление (низкий потенциал) , и ОБУ 5 выдает сигнал на вход 21 логического элемента 20. Таким образом, сигнал на вход 21 логического элемента 20 пришел раньше, чем пришел (жгнал на его вход 19 со счетчика, в результате логический элемент 20 вырабатывает на выходе, 22 сигнал, который переводит переключатель 23 выхода 24 блока 25 управления электромагнитами 26-27 в нижнее положение т.е. подключает к блоку 25 управления электромагнитами (БУЭ) электромагнит 26, тем -5 - 7 рамым логический элемент 20 заранее. определил, что регулирующее (поДворачивающее регулировошую лапку 28) усилие будет направлено по стрелке А. Одновреме1то сигнал с выхода 22 элемента 20 поступает на вход ОБУ 5, кото рый по выходу 18 запускает ГИ 9 тольке по выходу 29, причем условием остаковки ГИ 9, когда есть сигнал на входе 30, может быть только замыкание входов 4, 7 ОБУ 5 контактами 2 и б, кото рые в данном случае разоктенуты, Импульсы с выхода 29 ГИ 9 поступают на вход 31 блока 25 как импульсы запуска, по которым блок 2.5 формирует нарастающие по амплитуде импульсы тока в обмотке электромагнита 26, якорь которого 32 подворачивает регулировочную лапку 28 по стрелке А. К выводу 3 реле приварен массивньгй угольник 33 из мягкого , к кото рому крепится подвижной контакт 2. Сво. бодный конец угольника 33 вместе с неконтактируюшим концом подвижного контакта образуют, так называемые регулиро вочный хвостовик, на который надезвается развилка регулировочной лапки 28. При помощи поворота регулировочной лап ки 28, одетой на хвостовик подвижного контакта 2, воздействуют изгибающие импульсы нарастающей силы. После каждого импульса следует пауза, во время которой лапка 28 возвращается в исходное положение, так как якорь 32 электромагнита 26 УХОДИТ под влиянием возвратных пру- . жин.Лапка 28 импульсами подгибает квостовик до тех пор, пока между входами 4, 7 не появится контакт после возврата лапки в исходное положение. По контакту между входами 4, 7 ОБУ 5 прекратцает поток импульсов с выхода 29 ГИ 9 в дает команду БУШД 8 на реверс шагового двигателя 10, который отводят каретку 12 в.исходное положение. На этом заканчивается регулировка давления контактов до заданной величины, если оно было меньше ее. Если во время задания давления на щу пе 14 контакты 2 и 6 не разомкнулись, т.е.-счетчик 16 дал сигнал на вход 1.7 ОБУ 5 и на вход 19 логического элемен та, 6 электрическое соединение между входами 4, 7 осталось, тогда сигнал на - вход 21 поступит позже сигнала со счетчика 16, так как поступление сигнала на вход 17 ОБУ 5 при неразомкнутых кся тактах 2, 6 включает одновибратор (не 516показан), формирующий на входе 21 элемента 20 задержанный сигнал, На вьпсоде 34 элемента 20 сигнал пере водит переключатель 23 в верхнее положеюте, подключая выход 24 БУЭ 25 к обмотке электромагнита 27. Одновременно сигнал с выхода 34 через схему И поступает на вход 30, и ОБУ 5 запускает ГИ 9 по выходу 29, причем в этом случае условие остано|}ки ГИ 9,, когда есть сигнал на входе 30, может быть только размыкание входов 4, 7 4ОБУ 5 через контакты 2, 6, которые; в датгом случае замкнуты. Импульсы защска поступают На вход 31 БУЭ 25, который формирует нарастающие по амплитуде импульсы тока в обмотае электро-. магнита 26, якорь которого 35 двигает лапку 28 по стрелке Б, а лапка 28 периодически подгибает хвостовик до тех пор, пока не разомкнутся контакты 2, 6, после этого ОБУ 5 остановит поток импульсов и даст команду блоку 8 на реверс шагово-го двигателя 10, который отводит каретку 12 в исходное положение., На этом заканчивается регулиров1са давления контактов до заданной величины, если оно было больше ее. В процессе подгиба хвостовика (на этапах г и е) сила первого регулировочного импульса (ток в обмотке одного из электромагнитов) задана заранее такой, чтобы давление на поцвиншом контакте после первого регулирующего воздействия лапкой 28 не превышало нижней границы допустимого давления, а нарастание силы в каждом последующем регу1трующем импульсе должно создавать приращение регулируемого давления, не превышающее величины допуска контактного давления. Предложенный способ позволяет сократить время регулировочного цикла и число регулировочных подгибов и этим повысить производительность -/руйа при регулировке контактного давления микроминиатюрных реле. При одинаковой точности регулировки устройство, работающее по данному способу, проще по схемному решению и по кон струкщги. Это объясняется тем, что при гаком способе отоадает необходимость в текущих (после каждого подгиба) прецизионных измерениях контактного давления. Формула изобретения 1. Способ регулирования контактного давления размыкающих контактов, пре7HVffraeCTBettHo ДляГмикроШниатюрных апёкт1рбШ г ШГйых реле, состоящих, по крайней мере, из одного неподвижного Контакта и подвижного контакта в виде пружинь, закрепленной на опоре так, что образуются контактирующий и неконтактируюощй Кбйпы, регулирующего воздейстеия на некрнтактирующий конец для получения заданной величины контактного давления, отличающийС я м, что, с целью увеличения пройзаодй епьности, к контактирующему кон 11одвижного контакта приКйадыбают с помощью упругого элеменЗД усилие, соответствующее заданной ве лВЛнеконтактного давления и направ ленше 6 сторону размьпсания размыкающих KbflttaiKTOB, определяют начальное состбяние контактов, и по нему опредеhinoT направление регулируйщегр воздействия, затем воздействуют на неконтактируюший конец подвижного контакта импульсами ,сщы,а в промежутках между импульсами контройнруют состояние контактов до Момен 1 8 а изменения тачального состояния контактов, причем амплитуду импульсов силы увеличивают после каждого контроля состояния контактов. 2. Способ по ni 1, отличающ и и с я тем, что величину первого импульса силы задают так, чтобы давление контактирующего KOHita подвижного контакта на упругий элемент не превышало минимального значения заданной величины контактного давления, а вепичи ну пбсйедуюоих импульсов силы увеличи- , вают на величину, меньшую величины, соответствующей допуску заданной величины контактного давления. . Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 43.8985, кл. Н 01 Н 49/00, 1973. 2. Патент Великобритании № 1293518, кл. Н 1 N , 1975. 3. Сборка и регулировка радаотехнических устройств. Л., Судпромгиз, 1962, рис. 231-237.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования контактного зазора переключающей контактной группы | 1976 |
|
SU708430A1 |
| Устройство для автоматической регулировки контактного нажатия размыкающих контактов коммутационного элемента | 1985 |
|
SU1325599A1 |
| Устройство для измерения контактного нажатия электромагнитных реле | 1982 |
|
SU1129665A1 |
| Способ проверки контактного давления коммутационного аппарата и устройство для его осуществления | 1989 |
|
SU1787294A3 |
| Устройство для регулировки электромагнитной системы двухобмоточных поляризованных реле | 1982 |
|
SU1072135A1 |
| УСТРОЙСТВО ДЛЯ КОНТАКТНОЙ ЛАЗЕРНОЙ ОБРАБОТКИ | 2003 |
|
RU2266802C2 |
| Способ регулировки раствора контактов,провала якоря,напряжения срабатывания и усилия контактного нажатия электромагнитного реле клапанного типа | 1985 |
|
SU1328860A1 |
| Электроконтактный датчик микроперемещений | 1980 |
|
SU947626A1 |
| Автоматический прореживатель пропашных культур | 1981 |
|
SU1020014A1 |
| Датчик для контроля герметичности | 1981 |
|
SU1013792A1 |
