(54) СПОСОБ РЕГУЛИРОВКИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО
ПРЕОБРАЗОВАТЕЛЯ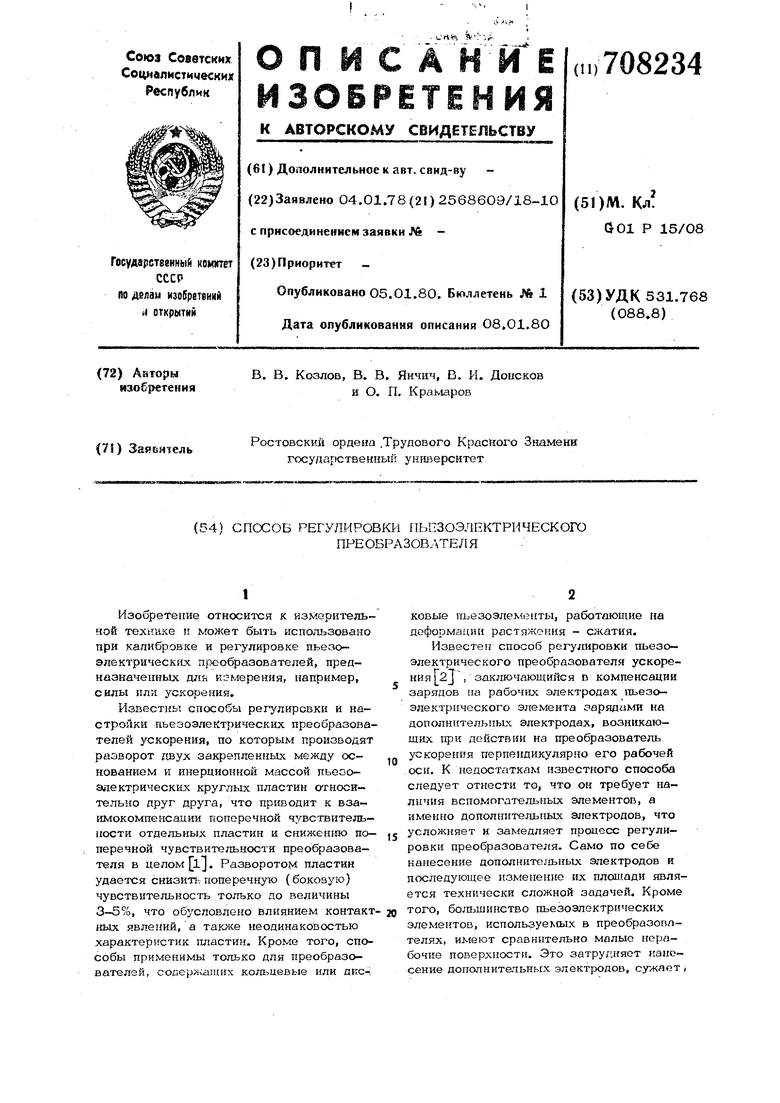
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОПРЕОБРАЗОВАТЕЛЯ | 1998 |
|
RU2159444C2 |
| Пьезоэлектрический преобразователь | 1975 |
|
SU551807A1 |
| Акселерометр | 1987 |
|
SU1478826A1 |
| Способ изготовления образца материала пьезокристаллических преобразователей для механических испытаний | 1990 |
|
SU1727026A1 |
| Пьезоэлектрический датчик давления и способ его настройки | 1989 |
|
SU1749733A1 |
| Пьезоэлектрический преобразователь ускорения | 1990 |
|
SU1809392A1 |
| Пьезоэлектрический преобразователь | 1989 |
|
SU1748292A1 |
| Способ изготовления пьезокерамического преобразователя | 1990 |
|
SU1757131A1 |
| Ультразвуковой пьезоэлектрическийпреобразователь | 1974 |
|
SU509826A1 |
| Пьезоэлектрический датчик давления и способ его изготовления | 1990 |
|
SU1770794A1 |
Изобретение относиах я к измерительной технике п может быть использовано при калибровке и регулировке пьезоэлектрических преобразователей, предназначенных длк измерения, например, силы нлн ускорения. Известны способы регулировки и настройки пьезоэлектрических преобразователей ускорения, по которым производят разворот двух закрепленных между основанием и инерционной массой пьезо- э 1ектрических круглых пластин относительно друг друга, что пр шодит к взаимокомпенсации поперечной чз вствитель- иости отдельных пластин и снижен1по поперечной чувствительности преобразователя в целом l. Разворотом пластин удается снизит :, поперечную (боковую) чувствительность только до величины 3-5%, что обусловлено влиянием контакт ных явлений, а также неодинаковостью характеристик пластин. Кроме того, способы применимы только для преобразователей, содерй-сащих кольцевые или дкс-, ковые пьезоэлем1;нты, работающие на деформации растяжения - сжатия. Известен способ регулировки пьезоэлектрического преобразователя ускорения 2 J, заключающийся п компенсации зарядов па рабочих электродах пьезоэлектрического Элемента зарядакт на дополнителы1Ь1х Электродах, возникающих при действии на преобразователтз ускорения перпендикулярно его рабочей оси, К недостаткам известного способа следует отнести то, что он требует fiaлнчия вспомогательных элементов, а именно дополнительных электродов, что усложняет и замедляет процесс регулировки преобразователя. Само по себе нанесение дополнительных электродов и последующее изменение их пло11.(ади является технически сложной задачей. Кроме того, бошзшинство пьезоэлектрических элементов, используемых в преобразователях, имеют сравнительно малые нерабочие поверхности. Это затрудняет ианосение дополнитачьных электродов, сужает ,
37
область применимости известного стюсоба регулировки преобразователей.
Наиболее близким по технической сущности к изобретению является способ регулировки, по которому на пьезоэлбмент осуществляется статическое физическое воздействие (давление) за счет поджатия пьезоэлемента мелоду основанием и инерционным элементом, что приводит к снижению поперечной чувствительности преобразователя Гз,
В этом способе уменьшение поперечной чувствительности за счет поджатия пьезоэлемента обусловлено контактными явлениями и в основном изменением площади контакта соприкасающихся поверхностей. При достижении определенного снижающего усилия контактная площадь уже не изменяется и величина поперечной чувствительности стабилизируется (на уровне 2-4%), Таким образом, рассматриваемый способ имеет огр ничение снизу по величине уменьшаемой поперечной чувствительности и применим только для конструкций преобразователя с предварительно поджатым пьезоэлементом, работающим на деформации растяжения сжатия.
Целью изобретения является повышение точности за счет снижения поперечной (боковой) чувствительности,
По новому способу определяют величину и направление боковой (поперечной чувствительности преобразователя. Затем в зоне максимума боковой чувствительности преобразователя на его пьезоэле- мент производят кратковременное локальное физическое воздействие, причем тип воздействия выбирают, исходя из формы пьезоэлемента,а время локального воздействия определяют в зависимости от времени релаксации и закрепления поляризованного состояния выбранного материала пьезоэлемента.
В общем случае боковая (поперечная чувствительность преобразователя сут проявления различного рода неоднородностей в преобразователе, в том числе неоднородности свойств пьезоэлементов. В результате действия на преобразователь боковых ускорений (усилий) на электродах пьезоэлемента возникают разноименные заряды, которые в силу упомянутых неоднородностей компенсируются не полностью и приводят к появлению боковой чувствительности. В разработанном способе предлагается с помощью локального физического воадей82344
ствия вводить в пьезоэлемент новые неоднородности, которые бы кo шeнcиpoвaли результат действия как имеющихся иеоднородностей пьезоэлемента, так к 5 неодгюродностей всей конструкции преобразователя. Локальное физическое воздействие в определенной области пьезоэлемента изменяет степень поляризации, это улучшает кo отeнca,цию разноименных to зарядов на электродах и щлшодит к более эффективному С1гажению боковой чувствительности.
Способ регулировки с це.лью снижения боковой чувствите-пьиос-л: применим практически ко всем конструкциям преобразователей, так как работа проводится с основным элементом всех преобразователей- пьезоэлементом.
Наиболее эффективное решение боко- 20 вой чувствитель-ности достигается при локальном воздействии на области пьезоэлемента, расположенные вдоль оси 1лаксимума боковой чувствительности. Тки физического воздействия зависг от фор25 мы пьезоэлемента, а величина воздействия определяется ш-езомэт-ериалом.
На фиг. 1 показано как реализуется предложенный способ уменьшения поперечной чувстзительпости цэнтрирозап- 30 него гя:,езоэлемента преобразователя ускорения.
КонструкткБКО Преобразователь выполнен следующим образом: пьезоэлект- рический кольцевой элемент 1 закреп35 пен между основанием 2 и ннерционной массой 3, которая выполнена в виде Т-образного тела вращения так, чтобы центр тялдасти инерционной ассы 3 и пьезоэлектрического элемента 1 COD мещался в одной точке. При такой форме пьезоэлемента локальноа воздейстпие Электрическим полем с целью изтлененкя поляркаованного состояния мейозможно, так как электрод у пьезоэлемента сппош ной и электрическое поле будет действовать не локально, а ш весь пьезоэлемент. Здесь имеет смысл использовать либо локальный нагрев, либо локалы.ое давление на пьезозлемент. Рассмотрим последнее физическое воздействие. После нахождения величины и направления максимума поп.ереч5той чувствительности щт помо-ЩИ пресса с накладками 4 (см.. фиг. 1) на сектор кольцевого пьезоэле мента, находящийся в направлении максимума, осуществляют локальное давление. Для пьезокерамическнх элементов на материала LJTC-10 величина давле5
ПИЯ составляет 850 кг/см и длительность - 5 мин. Поперечная чувствительность образцов снижается с 4 до 1,5% при практически неизменной рабочей чувствительности.
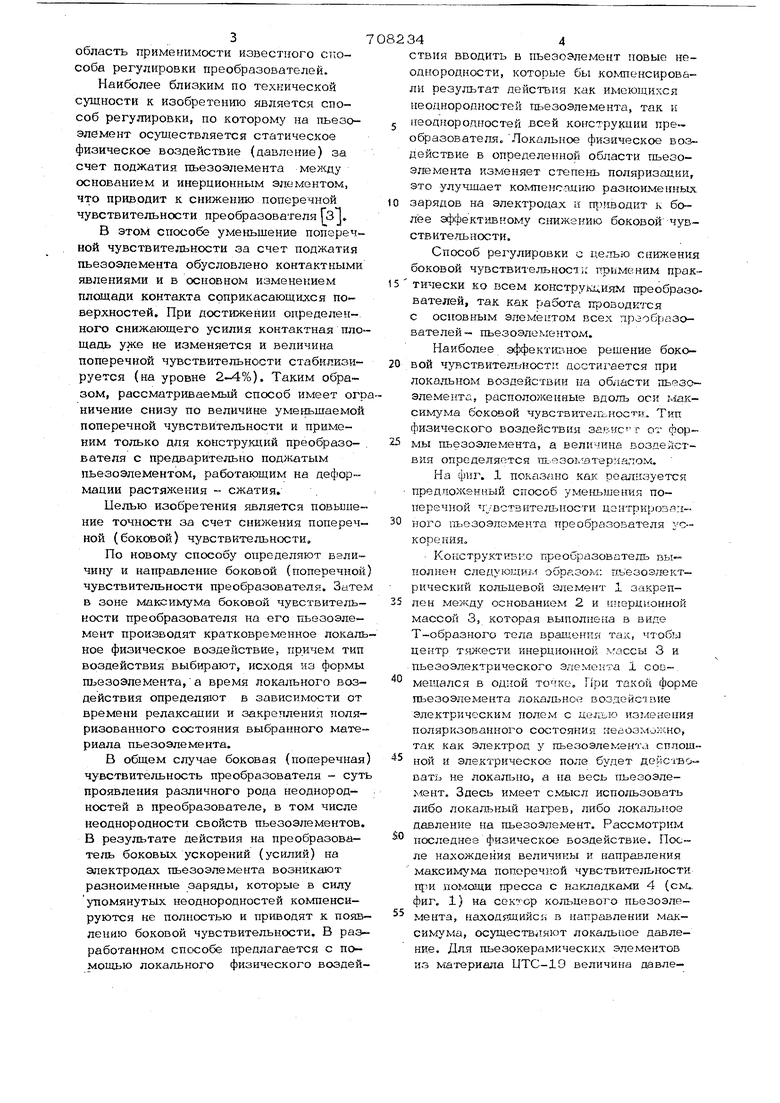
На фиг. 2 (а,б,в) показано применение электрического поля в качестве локального физического воздействия при снилсении поперечной чувствительности, В монокерамическом преобразователе ускорения типа МКА-8 имеется шесть пьезоэлементов, перекоммутированных между собой соответствующим образом. После нахождения величины и направления .максимума поперечной чувствительности выделяют пару пьезоэлементов, находшцг-глся в зоне максимума, и осуществляют на них воздействие подполяризующим Электрическим полем. Остальные пьезоэлементы при этом закорачивают ка землю (фиг, 2в). Для преобразователей из керамики ЦТС-19 величина электрического поля составляет 20 КБ/СМ и длительность - мин. Поперечная чувститеяьность образцов умешшается примерно в два раза.
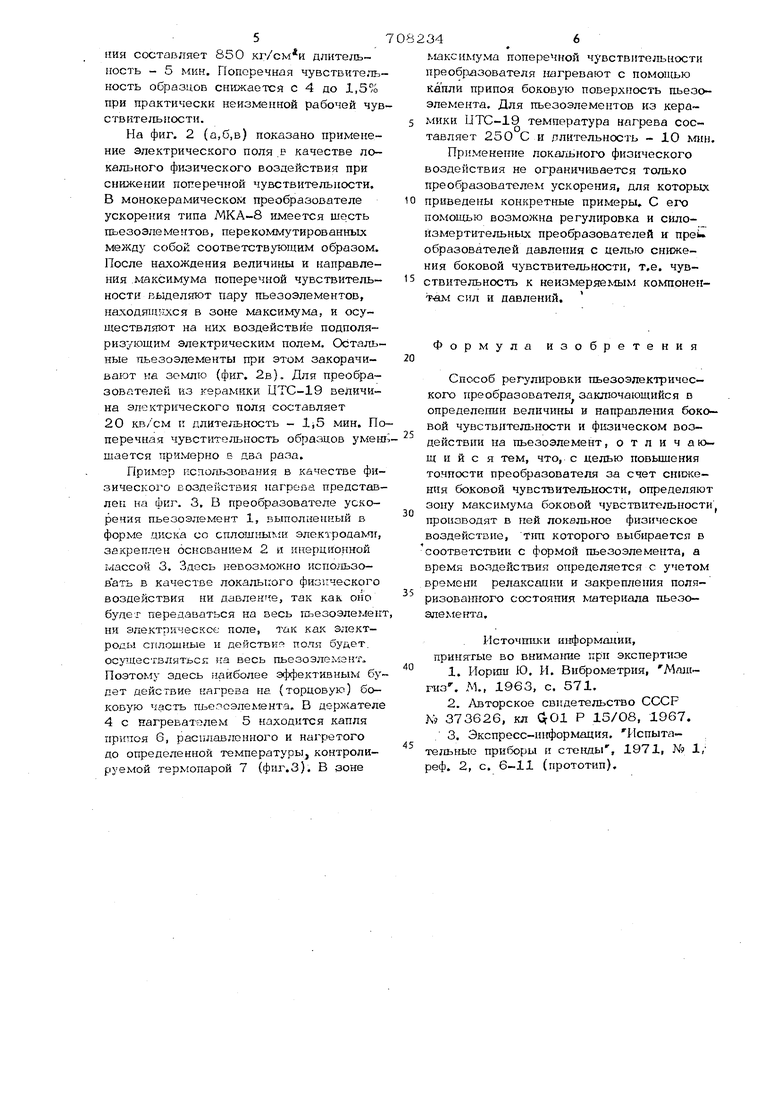
Пример использования в качестве физического воздействия uarpeija представлен на фиг. 3, В преобразоваа еле ускорения пьезоэле мент 1, выполнеяный в форме диска со сплошными электродами, закреплен основанием 2 и инерднонной массой 3. Здесь невозможно использовать в качестве локалы:ого физического воздействия ни давление, так как оно будет передаваться на весь пьезоэле мент ни электрическое поле, так как электроды сплошные II действиг поля будет. осу7дествлятьсЕ ка весь пьезоэлемэнт. Поэтому здесь гшиболее эффективным будет действие нагрева на (торцовую) боковую часть пьезоэлемента, В держателе 4 с нагревателем 5 находится капля припоя 6, расплавленного и нагретого до определенной температуры, контролируемой термопарой 7 {фпг,3). В зоне
максимума поперечной чувствительности преобразователя вдгревают с помощью капли припоя боковую поверхность аьезоэлемента. Для пьезоэлементов из кера
5 МИКИ LITC-19 температура нагрева составляет 250 Си длительность - 10 Ш1Н.
Применение локального физического воздействия не ограничивается только преобразователем ускорения, для которых
10 приведены конкретные примеры, С его помоишю возможна регулировка и силонзмертительных преобразователей к npew образователей давления с целью сн1скения боковой чувствительности, т.е. чув15ствительность к неизмеряемым кокгаононf-eLM сил и давлений,
Формула изобретения
20
Способ регулировки пьезоэлектрического преобразователя заключающийся в определении величины и направления боковой чувствительности и физическом воз5действии на пьезоэлемент, о т л и ч а ю- щ и и с я тем, что, с целью повышения точности преобразователя за счет снижения боковой чувствительности, определяют зону максимума боковой чувствительности производят в ней локальное физическое воздействие, Tim которого выбирается в соотве1х:твии с формой пьезоэлемента, а время воздействия определяется с учетом времени релаксации и закрепления поля5ризованного состояния материала пьезо- Элемента.
Источники информации, принятые во Бнимагше прп экспертизе 1, Иоршн Ю. И. Виброметрия, Мшвгиз. М., 1963, с. 571.
(puti
Iput 2
