Изобретение относится к области контроля параметров движения, а именно - к первичным пьезоэлектрическим преобразователям, применяемым в ключевых системах контроля движения различных объектов, оборудования, инженерных сооружений, грунта и т.п.
Применение известных пьезоэлектрических преобразователей ускорения в ключевых системах контроля движения ограничивается низкой помехоустойчивостью при действии механических возмущений с уровнем ускорений ниже порогового (несанкционированных механических возмущений), Собственный электрический шум при этом накладывается на сигнал преобразователя, вызванный механическим возмущением, и может вызвать при превышении заданного уровня напряжения непредусмотренное срабатывание системы (включение, выключение и т.п.). Влияние помех особенно, ощутимо в ключевых системах контроля сейсмических колебаний, возникающих при землетрясениях, вибрации оборудования и т.п., в результате чрезвычайно слабых сигналов от пьезоэлектрических преобразователей (десятки мкВ - мВ).
Известные пьезоакселерометры, обладающие высокой чувствительностью, как правило, имеют относительно низкую прочность, что ограничивает их применение весьма тяжелыми и стационарными объектами.
Для увеличения прочности в пьезоэлектрическом акселерометре, выполненном по схеме с использованием изгиба тонкого пьёзокерамического диска, инерционный элемент выполнен в виде диска с равномерно распределенными по его периметру выступами, Тем не менее, при изгибе пьезокераммческий диск испытывает напряжения растяжения, что ограничивает амплитудный диапазон в результате меньшей прочкостм пьезокерамики при растяжении, чем при сжатии. Так, например, предел прочности при. рзстяжении Ораст широко применяемой высокоэффективной пьезокерамики ЦТС-19 более чем в 4 раза меньше предела прочности при сжатии 7Сж.
В пьезокерамическом акселерометре, выполненном также по схеме с использованием деформаций изгиба тонкого пьезокера- мического диска, для повышения прочности упругую пластину с пьезокераммческим диском при сборке изгибают таким образом, чтобы обеспечить предварительно-напряженное сжатое состояние пьезоэлемента. Однако и такая конструкция не исключает деформаций растяжения пьезоэлемента при действии ускорения от основания в корпус акселерометра.
В рассмотренных конструкциях отсутствует возможность регулировки порога чувствительности по ускорениям, ниже которого механические возмущения не вызывают появления электрического сигнала. Выходное напряжение акселерометров прямо пропорционально действующему ускорению во всем амплитудном диапазоне. Нижний уровень воспринимаемых ускорений очень низок и зависит от способа крепления пьезоэлемента, упругой мембраны и других конструктивно-компоновочных параметров. Отсутствие регулируемого порога чувствительности по ускорениям ограничивает применение пьезоэлектрических акселерометров в ключевых системах контроля параметров движения.
Наиболее близким к изобретению по технической сущности является пьезоэлектрический акселерометр, содержащий-корпус, инерционный элемент, упругий элемент и пьезоэлемент.
Предварительное поджатиё осуществляется за счет затяжки корпуса к основанию акселерометра. При действии разнополяр- иых ускорений пьезоэлемент испытывает только деформации сжатия, чем обеспечивается высокая ударная прочность.
.При действии ускорения в направлении от упругого элемента к инерционному элементу уменьшается усилие поджатия и, та ким образом, существует возможность отрыва упругого элемента от корпуса (в дальнейшем по тексту - возможность взаимодействия мнерционнбгб элемента с корпусом посредством упругого элемента). При этом образуется зазор между корпусом и упругим элементом, При уменьшении силы предварительного поджатия снижается и уровень ускорений, при котором происходит отрыв упругого элемента от корпуса. При действии ускорения в обратном направлении существует возможность отрыва пьезоэлемента от основания корпуса, При отрыве упругого элемента от корпуса или пьезоэлемента от основания происходит искажение сигнала. Для этой конструкции не- обходимо выбирать амплитудный диапазон ускорений таким образом, чтобы не происходили указанные отрывы.
Кроме того, в рассматриваемом акселерометре также отсутствует регулируемый порог срабатывания по ускорениям.
Таким образом, наличие электрического сигнала при действии несанкционированных механических возмущений (с амплитудой ускорений ниже пороговых) снижает устойчивость пьезоэлектрического преобразователя ускорений. Целью настоящего изобретения является повышение устойчивости к влиянию несанкционированных механических возмущений. Цель достигается тем, что в известном пьезоэлектрическом преобразователе ускорения, содержащем корпус, первый инерционный элемент,
установленный с возможностью взаимодействия с корпусом посредством первого упругого элемента, и пьезоэлемент, дополнительно введен второй инерционный элемент, установленный с возможностью
взаимодействия с корпусом посредством второго упругого элемента, а пьезоэлемент размещен между инерционными элементами, при этом величины масс инерционных элементов и-жесткостей упругих элементов
выбраны из соотношения.
MiC2 Mad,
где Mi - масса первого инерционного элемента;
MZ - масса второго инерционного элемента;
Ci - жесткость первого упругого элемента;
С2-жесткость второго упругого элемента..
Известен пьезоэлектрический преобразователь ускорения, содержащий корпус, два инерционных элемента, один из которых связан с корпусом посредством упругого элемента, и два пьезоэлемента, один из которых размещен между инерционными элементами. Введение второго инерционного элемента вызвано наличием второго
пьезоэлемента, сигнал от которого сравнивается с показаниями первого пьезоэлемента для нечувствительности к воздействию волн давления. Наличие в устройстве второго инерционного элемента позволяет устранить влияние импульсного давления путем вычитания электрических сигналов от обоих пьезоэлементов. Однако в такой конструкции также, как и; в ранее рассмотренных, отсутствует порог срабатывания по ускорениям, что ограничивает применение таких
датчиков в ключевых системах контроля движения из-за низкой устойчивости к влиянию несанкционированных механических возмущений.
Повышение устойчивости к влиянию несанкционированных механических возмущений достигается путем образования регулируемого порога срабатывания по ускорениям, ниже которого пьезоэлемент не испытывает деформаций. Отсутствие деформаций пьезоэлемента достигается при условии равенства перемещений первого и второго инерционных элементов, т.е.
5i fa
где 5i - перемещение первого инерционного элемента:
да - перемещение второго инерционного элемента.
С другой стороны, перемещение инерционных элементов определяется жестко- стями упругих элементов и массами инерционных элементов и не зависит от жесткости пьезоэлемента
д, - М1А 01 Ci
,1&- М2А
И 02- Cz
где А - величина действующего ускорения. Отсюда
MiA М2А
Ci
С2
или MiC2 Mad
Приведенное соотношение масс инерционных элементов и жесткостей упругих элементов определяет условие образования порога срабатывания по ускорениям. Регулировка порога срабатывания обеспечивается предварительным поджатием пьезоэлемента и упругих элементов.
Порог срабатывания по ускорениям Апор определяется по формуле
тподж
Лпор Mi + М2
(1),
где Апор -. порог срабатывания по ускорениям;
Рподж - сила предварительного поджа- тия.
При действии ускорения выше пороговых инерционные силы превышают силу предварительного поджатия Рподж и один из инерционных элементов в зависимости от направления ускорения отрывается от упругого элемента, образуя зазор. При этом скачкообразно изменяется чувствительность преобразователя. Дальнейшее увеличение ускорений приводит к появлению электрического сигнала, прямо пропорционального в рабочем частотном диапазоне 5 произведению массы оторвавшегося от упругого элемента инерционного элемента на разность ускорений (А-АПор). Причем, выбирая равными значения масс инерционных элементов и жесткостей упругих элементов,
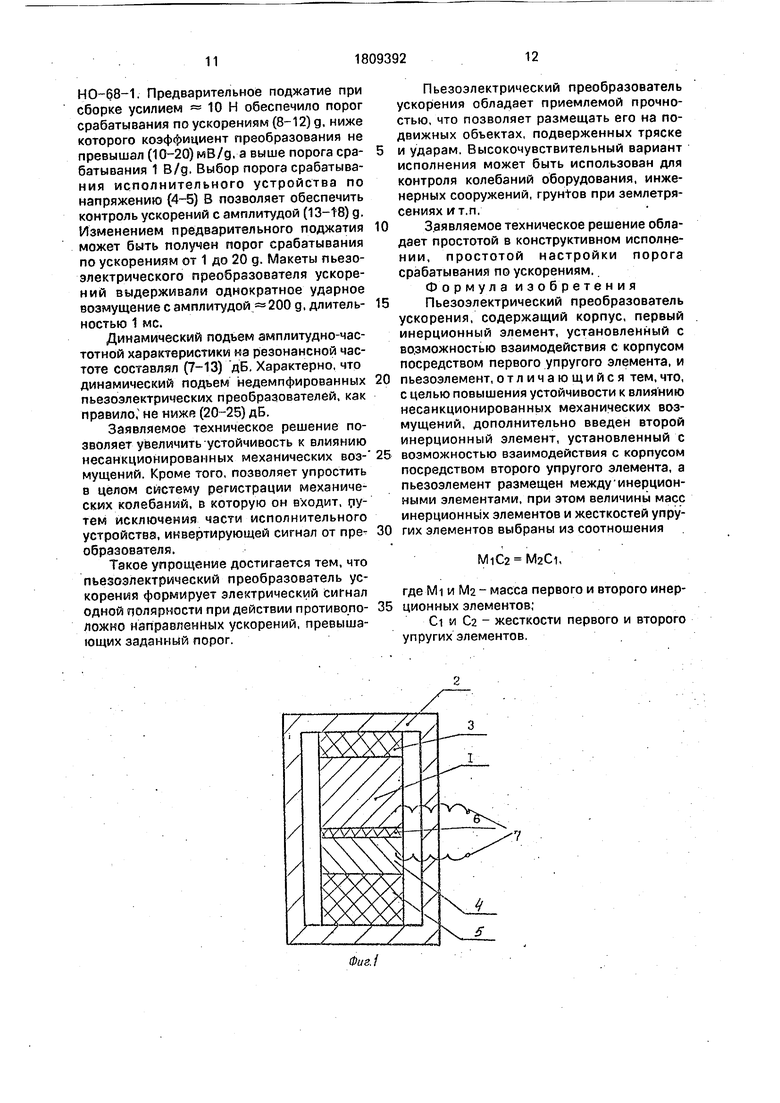
0 получаем равную чувствител ьность при действии противоположно направленных (раз- нополярных) ускорений, что является обязательным условием в ключевых системах контроля движения, направление кото.5. рого заранее неизвестно.t На фиг. 1, 2 и 3 представлены конструктивные схемы пьезоэлектрического преобразователя ускорения с пьезоэлементом, испытывающим деформации сжатия, сдвига
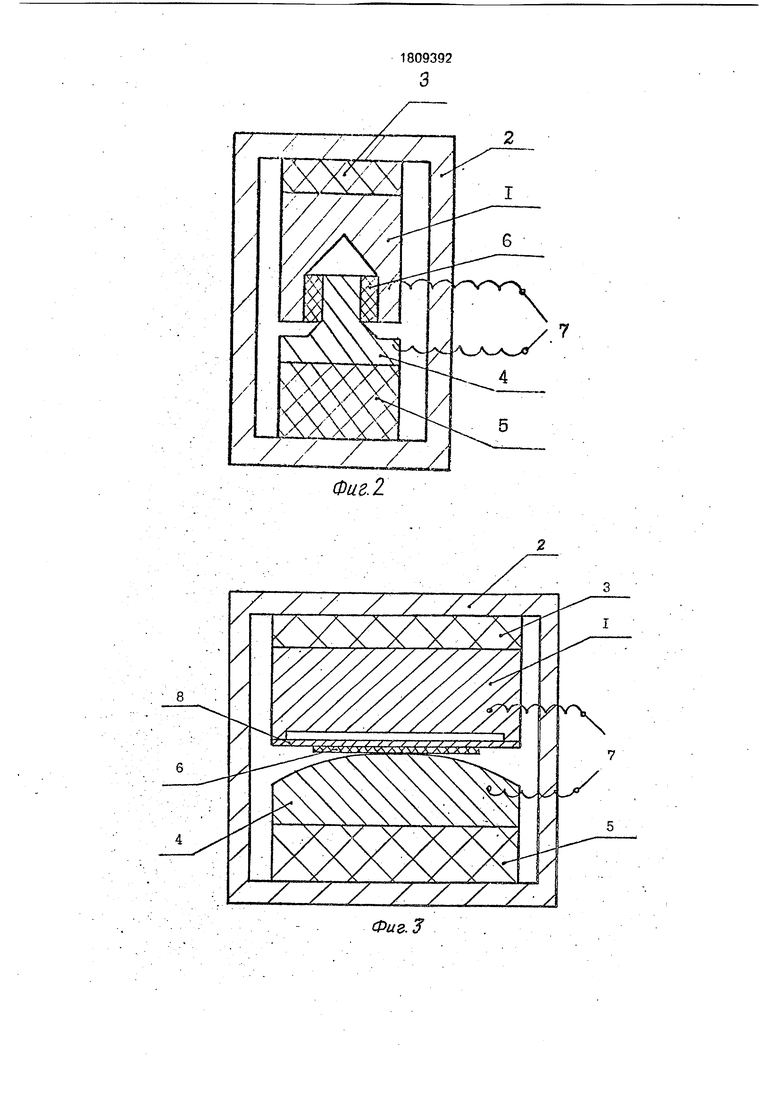
0 и изгиба, соответственно, где 1 - первый инерционный элемент; 2 - корпус; 3 - первый упругий элемент; 4 - второй инерционный элемент; 5 - второй упругий элемент; 6 - пьезоэлемент; 7 - электриче5 ские выводы; 8 - упругая мембрана.
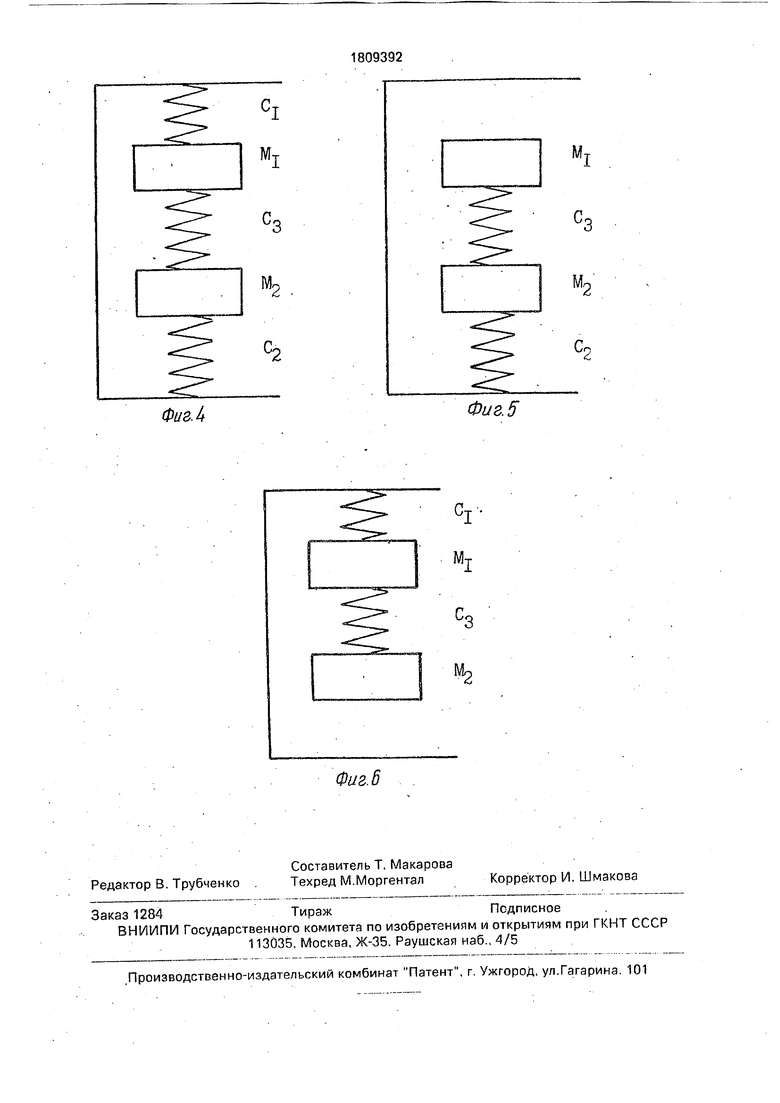
На фиг. 4, 5, 6 - механические схемы пьезоэлектрического преобразователя ускорения при действии ускорений ниже порога срабатывания, при действии ускорений
0 выше порога срабатывания в направлении от второго инерционного элемента к первому и при действии ускорений.выше пороговых в обратном направлении, соответственно,
5 Пьезоэлектрический преобразователь ускорения содержит первый инерционный элемент 1, установленный с возможностью взаимодействия с корпусом 2 посредством первого упругого элемента 3. Вто0 рой инерционный.элемент 4 установлен с возможностью взаимодействия с корпусом 2 посредством второго упругого элемента 5. Пьезоэлемент 6 размещен между . инерционными элементами 1, 4. Величины
5 масс инерционных элементов и упругих элементов выбраны из соотношения
MlC2 М2С1.
0 Электрический сигнал с пьезоэлемента б снимается посредством электрических выводов 7.
В конструктивной схеме рис. 1 пьезоэлемент испытывает деформации сжатия. При
5 действии ускорений ниже пороговых Апор инерционные элементы 1 и 4 перемещаются, при этом расстояние между ними не изменяется, что обеспечивает отсутствие деформаций пьезоэлемента 6. При превы- шении ускорений порога срабатывания Апородин.из инерционных элементов отрывается от упругого элемента, образуя зазор между инерционным и упругим элементом. Инерционная сила оторвавшегося инерционного элемента приводит к деформации пьезоэлемента б и, соответственно, к появлению электрического сигнала, пропорционального массе инерционного элемента и разности действующего ускорения (А-АПор). При действии ускорения в направлении от первого инерционного элемента 1 ко второму инерционному элементу 4 образуется зазор между вторым инерционным элементом 4 и вторым упругим элементом 5. При движении в обратном направлении образуется зазор между первым инерционным элементом 1 и первым упругим элементом 3. В обоих случаях пьезоэлемент испытывает напряжения сжатия, что позволяет обеспечить приемлемую ударную стойкость. Дополни- тельное увеличение прочности вносит изменение упругих свойств при отрыве одного из инерционных элементов от упругого элемента и срыве механических колебаний с резонансной частотой. Изменение упругих свойств при превышении порога срабатывания вызывает изменение резонансной частоты и уменьшение деформаций пьезоэлемента 6,
На фиг. 2 и 3 показаны варианты конструктивных схем пьезоэлектрического преобразователя ускорения с пьезоэлементом б, использующим деформации сдвига и изгиба, соответственно,
Пьезоэлемент б преобразователя по схеме рис.2 выполнен в виде полого пьезоэлектрического цилиндра, на цилиндрических поверхностях которого образованы электроды. Поляризация пьезоэлемента б осуществляется вдоль оси цилиндра. Съем электрического заряда производится посредством электрических выводов 7. При этом инерционные элементы 1 и 4 служат токосъемниками, При действии ускорения выше порогового инерционные элементы 1 и 4 смещаются относительно друг друга и тем самым вызывают сдвиг пьезоэлемента 6.
Пьезоэлемент 6 преобразователя по схеме фиг. 3 выполнен в виде тонкого пьезоэлектрического диска. При смещении относительно друг друга инерционных элементов 1 и 4 происходит изгиб пьезоэлемента 6, Пьезоэлемент 6 опирается на выступ первого инерционного элемента 1. Второй инерционный элемент 4 шаровой поверхностью опирается на пьезоэлемент б. Выполнение пьезоэлектрического преобразователя ускорений по схеме с использованием деформаций изгиба пьезоэлемента, а также выполнение опоры второго инерционного элемента 4 в виде шаровой поверхности позволяет реализовать весьма высокую чувствительность для обеспечения возможности регистрации сейсмических колебаний.
Для обеспечения ударной стойкости пьезоэлемент 6 может быть подкреплен упругой мембраной поз.8, опирающейся на выступ первого инерционного элемента 1.
0 Тогда при изгибе составного чувствительного элемента пьезоэлемент 6 испытывает деформации сжатия.
Последний вариант исполнения пьезоэлектрического преобразователя является
5 предпочтительным, т.к. позволяет реализовать высокую чувствительность при сохранении достаточной прочности.
Во всех вариантах исполнения конструктивных схем инерционные элементы 1 и
0 4 сопрягаются с упругими элементами 3 и 5 с обеспечением возможности отрыва от них при минимальном усилии.Упругие элементы 3 и 5 могут быть как поджаты к корпусу 2, так и жестко соединены с ним. Последний вари5 ант является более предпочтительным для исключения смещения упругих элементов 3 и 5 при отрыве от них соответствующих инерционных элементов 1 и 4. Пьезоэлемент: 6 в процессе сборки зажимается меж0 ду инерционными элементами 1 и 4. Допускается вариант исполнения конструктивных схем с жестким соединением пьезоэлемента 6 с инерционными элементами 1 и 4. Во всех вариантах инерционные элемен5 ты 1 и 4 служат токосъемниками и должны быть электрически/изолирован ы друг от друга.
Заявляемое устройство работает еле- дующим образом. При действии ускорений
0 ниже пороговых коэффициент преобразования ускорения заявляемого преобразователя равен нулю. Механическую схему пьезоэлектрического преобразователя ускорения для этого случая следует предста5 вить в виде колебательной системы с двумя степенями свободы, включающей два инерционных элемента и три пружины, где Ci - жесткость верхней пружины, моделирующей первый упругий элемент 3;
0 Са - жесткость нижней пружины, моделирующей второй упругий элемент 5;
Сз - жесткость средней пружины.моде- лирующей пьезоэлемент 6;
Mi - масса первого инерционного эле5 мента 1;
Ма - масса второго инерционного элемента 4.
Исходя из известного решения уравнений движения колебательной системы с двумя степенями свободы (5) находим, что
коэффициент преобразования пьезоэлектрического преобразователя ускорения пропорционален коэффициенту Ayi
Ау1М1 С2 - М2 С1
Аналогичные рассуждения справедливы для преобразователя и при действии ускорения в обратном направлении, Динамическая схема для этого случая при- ведена на рис.6. Коэффициент преобразования пропорционален

| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический преобразователь ускорения | 1980 |
|
SU964549A1 |
| ДАТЧИК СОУДАРЕНИЯ | 2003 |
|
RU2248577C1 |
| Пьезоэлектрический акселерометр | 2016 |
|
RU2627571C1 |
| УДАРОПРОЧНЫЙ МАЛОГАБАРИТНЫЙ ВЫСОКОЧУВСТВИТЕЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2615600C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2400760C1 |
| Пьезоэлектрический акселерометр | 1984 |
|
SU1216736A1 |
| Способ реализации и устройство чувствительного элемента для контроля параметров движения в составе многоуровневого многокристального модуля | 2019 |
|
RU2702401C1 |
| ДАТЧИК ЗАЩИТНОГО УСТРОЙСТВА СИСТЕМЫ ПАССИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2043224C1 |
| Пьезоэлектрический акселерометр | 1981 |
|
SU1015311A1 |
| Пьезоэлектрический акселерометр | 1981 |
|
SU1007022A1 |
Использование: в области контроля параметров движения. Сущность изобретения: пьезоэлектрический преобразователь ускорения содержит корпус, два инерционных элемента, взаимодействующие с ним посредством упругих элементов. Между инерционными элементами размещен пье- зозлемент. Величины масс инерционных элементов и жесткостей упругих элементов выбраны из соотношения MiC2 MaCi, где Mi, Ma - массы первого и второго инерционных элементов, соответственно, Ci, Ca - жесткости первого и второго инерционных элементов, соответственно. 6 ил.
(GI +сз ) (ci +сз - ft/2 Ma) - с§
. (2),
где со- частота вынужденных колебаний. В рабочей области частот членами уравнения () и (огМз) можно пренебречь. Получим
Ayi
MI €2 - IVI2 Ci Ci C2 + C2 Сз + Ci Сз
Таким образом, при условии MiCa MaCi
коэффициент преобразования ускорения равен нулю и не зависит от жесткости пье- зоэлемента 6.
При действии ускорений выше пороговых в направлении от второго инерционного элемента 4 к первому, первый инерционный элемент 1 отрывается от упругого элемента 3.
Динамическая схема для этого случая представлена на рис. 5. Коэффициент преобразования увеличивается скачкообразно и становится пропорциональным коэффициенту
Ду2М1 С2
( СЗ - СУ2 М1 ) ( СЗ + С2 - О М2 ) - С§
(4)
В рабочем диапазоне частот зависимость (4) может быть представлена, в виде
. д MjC2 Ml
Характерно, что увеличение коэффициента преобразования происходит также в результате уменьшения жесткости чувствительного элемента при отрыве первого инерционного элемента 1 от упругого элемента 3, о чем свидетельствует уменьшение знаменателя зависимости (5). Причем коэффициент преобразования в этом случае не зависит от жесткости упругих элементов 3 и 5, что позволяет выбором определенной жесткости упругих элементов 3 и 5 добиваться приемлемого отношения сигнал/помеха при срабатывании преобразователя. .
Дуз -----
10(С1+СЗ
- М2 .
- О М1 ) ( СЗ - О М2 ) - С§
(6)
или, упрощая,
15
Ауз
-М2 Сз
(7)
Знак минус указывает на то, что при изменении направления ускорения полярность
2о электрического сигнала не изменяется.
При равенстве масс инерционных элементов 1 и 4 и жесткостей упругих элементов 3 и 5 получаем равную чувствительность при действии противоположно направлен25 ных ускорений. Следует отметить также, что при действии ускорений, превышающих порог срабатывания, скачкообразно изменяются упругие свойства преобразователя, что обеспечивает дополнительное рассеяЗо ние механических колебаний с резонансной частотой.
Порог срабатывания пьезоэлектрического преобразователя ускорения обеспечивается при сборке предварительным
35 поджатием. Величина усилия поджатия рассчитывается по формуле (1). Для ключевых систем контроля ударных процессов следует уменьшать массу инерционных элементов 1 и А и увеличивать усилие поджатия.
40 Для систем же регистрации сейсмических колебаний необходимо применять более тяжелые инерционные элементы и снижать усилие поджатия.
На практике было реализовано следую45 Щее:
Были изготовлены макетные образцы по .
схеме рис.3 и проведены лабораторные испытания, подтвердившие возможность создания пьезоэлектрического преобразо50 вателя ускорения, устойчивого к влиянию несанкционированных механических возмущений. Величины масс инерционных элементов и жесткостей упругих элементов были выбраны равными и составляли -45 г
55 и 8-10 Н/м, соответственно. Пьезоэле- ментв виде диска 015 х 0,3 мм из пьезоке- рамики ЦТС-19 был наклеен на тонкую упругую мембрану 0 19 х 0,4 мм из стали 36 НХТЮ. Упругие элементы были изготовлены в виде диска 0 25 х 2 мм из резины
НО-68-1. Предварительное поджатие при сборке усилием «ЮН обеспечило порог срабатывания по ускорениям (8-12) д, ниже которого коэффициент преобразования не превышал (10-20) мВ/д, а выше порога срабатывания 1 В/д. Выбор порога срабатывания исполнительного устройства по напряжению (4-5) В позволяет обеспечить контроль ускорений с амплитудой (13-t8) g. Изменением предварительного поджатия может быть получен порог срабатывания по ускорениям от 1 до 20 д. Макеты пьезоэлектрического преобразователя ускорений выдерживали однократное ударное возмущение с амплитудой 200 д, длительностью 1 мс.
Динамический подъем амплитудно-частотной характеристики на резонансной частоте составлял (7-13) дБ, Характерно, что динамический подъем недемпфированных пьезоэлектрических преобразователей, как правило, не нижа (20-25) дБ.
Заявляемое техническое решение позволяет увеличить устойчивость к влиянию несанкционированных механических воз- мущений. Кроме того, позволяет упростить в целом систему регистрации механических колебаний, в которую он входит, путем исключения части исполнительного устройства, инвертирующей сигнал от преобразователя.
Такое упрощение достигается тем, что пьезоэлектрический преобразователь ускорения формирует электрический Сигнал одной полярности при действии противоположно направленных ускорений, превышающих заданный порог.
Пьезоэлектрический преобразователь ускорения обладает приемлемой прочностью, что позволяет размещать его на подвижных объектах, подверженных тряске
и ударам. Высокочувствительный вариант исполнения может быть использован для контроля колебаний оборудования, инженерных сооружений, грунтов при землетрясениях и т.п.
Заявляемое техническое решение обладает простотой в конструктивном исполнении, простотой настройки порога срабатывания по ускорениям.
Формула изобретения
Пьезоэлектрический преобразователь ускорения, содержащий корпус, первый инерционный элемент, установленный с возможностью взаимодействия с корпусом посредством первого упругого элемента, и
пьезоэлемент, отличающийся тем, что, с целью повышения устойчивости к влиянию несанкционированных механических возмущений, дополнительно введен второй инерционный элемент, установленный с
возможностью взаимодействия с корпусом посредством второго упругого элемента, а пьезоэлемент размещен между инерционными элементами, при этом величины масс инерционных элементов и жесткостей упругих элементов выбраны из соотношения
MiC2 MaCi,
где Mi и Ma - масса первого и второго инер- ционных элементов;
Ci и Са - жесткости первого и второго упругих элементов.
Фиг. 4
Фиг.5
| Пьезоэлектрический акселерометр | 1983 |
|
SU1138745A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пьезоэлектрический акселерометр | 1975 |
|
SU737838A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
