I
Данное изобретение относится к геофизическим исследованиям в скважине.
Известно устройство для измерения наклона скважины, содержащее магнит- нь1й Маятник, феррозондовые преобразователи .
А также известен инклинометр, содержащий маятник, магнитомодуляционные преобразователи, фазовый детектор, удвоитель частоты, модулятор, блок преобразования сигналов 2.
Недостатками указанных устройств является невозможность непосредственного определения азимута без дополнительных вычислений. Кроме того, данный инклинометр пригоден для измерения азимута лишь при остановке устройства. Однако, на практике возникает необходимость измерения азимута в процессе непрерьюного движения снаряда по скважине.
Целью данного изобретения является повышение точности и непрерывного из-
мерения азимута в процессе движения поибора по скважине.
Указанная цель достигается за счет того, что устройство снабжено измерителем длины кабеля и связанным с ним фазовращателем, который последовательно соединен через удвоитель частоты и фазовый детектор с модулятором, кото рый подключен к блоку преобразования сигналов.
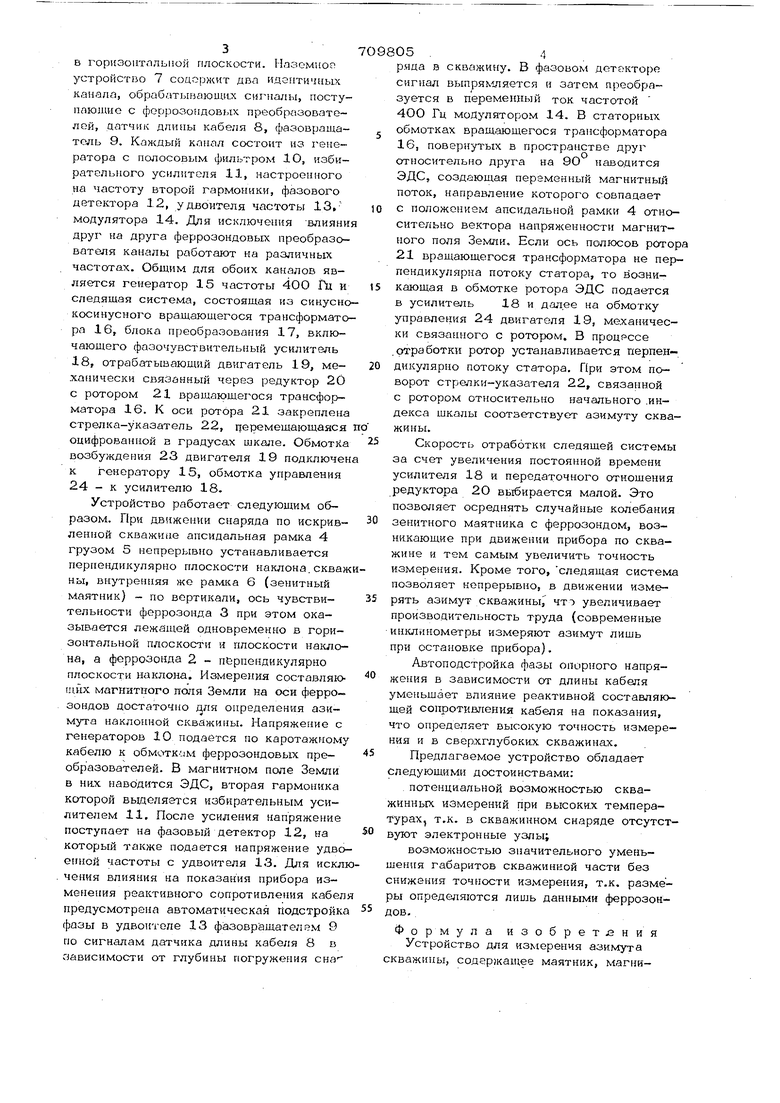
На фиг. 1 - конструктивная схема глубинной части; на фиг. 2 - принципиальная схема измерительной и регистрирующей части датчика азимута.
В скважинном приборе 1 размещены два однокатушечных феррозондовьк преобразователя 2 и 3, оси чувствительности которых займво-перпендикулярны. Один из НИ.Х закреплен в апсидальной рамке 4, центр тяжести которой смешен эксцентричным грузом 5, другой - в маятниковой зенитной рамке 6, удерживающей ось чувствительности феррозонда в горизонтальной плоскости. Маземиоп устройство 7 соцоржит два идентичных канала, обрабатывающих сигналы, поступающие с форрозондовых преобразователей, датчик длины кабеля 8, фазовращатель 9. Каждый канал состоит из i-eiieратора с нолосовым фильтром 1О, избирательного усил 1теля 11, настроенного на частоту второй гармоники, фазового детектора 12, удвоителя частоты 13, модулятора 14. Для исключения влияни друг на друга феррозондовых преобразователя каналы работают на различных частотах. Общим для обоих каналов является генератор 15 частоты 400 Гц и следящая система, состоящая из синусно косинусного вращающегося трансформато ра 16, блока преобразования 17, включающего фазочувствительный усилитель 18, отрабатывающий двигатель 19, механически связанный через редуктор 20 с ротором 21 вращающегося трансформатора 16. К оси ротора 21 закреплена стрелка-указатель 22, перемещающаяся оцифрованной в градусах шкале. Обмотка возбуждения 23 двигателя 19 подключен к генератору 15, обмотка управления 24 - к усилителю 18. Устройство работает следующим образом. При движении снаряда по искривленной скважине апсидальная рамка 4 грузом 5 непрерывно устанавливается перпендикулярно плоскости наклона.скваж ны, внутренняя же paMica 6 (зенитный Маятник) по вертикали, ось чувствительности феррозонда 3 при этом оказывается лежащей одновременно в горизонтальной плоскости и плоскости наклона, а феррозонда 2 - перпендикулярно плоскости наклона. Измерения составляю щих магнитного пачя Земли на оси ферро™ зондов достаточно для определения азимута наклонной скважины. Напряжение с генераторов 10 подается по каротажном кабелю к обмотким феррозондовых преобразователей. В магнитном поле Земли в НИ.Х наводится ЭДС, вторая гармоника которой вьщеляется избирательным усилителем 11. После усиления напряжение поступает на фазовый детектор 12, на который также подается напряжение удво енной частоты с удвоителя 13. Для искл чения влияния на показания прибора изменения реактивного сопротивления кабел предусмотрена автоматическая подстройк фазы в удвоителе 13 фазоврйщателем 9 по сигналам датчика длины кабеля 8 в зависимости от глубины погружения сна 05 ряда в скважину. В фазовом детекторе сигнал выпрямляется и затем преобразуется в переменный ток частотой 4ОО Гц модулятором 14. В статорных обмотках вращ.ающегося трансформатора 16, повернутых в пространстве друг на 9О наводится относительно друга ЭДС, создающая перэменный магнитный поток, направление которого совпадает с положением апсидальной рамки 4 относительно вектора напряженности магнитного поля Земли, Если ось полюсов ротора 21 вращающегося трансформатора не перпендикулярна потоку статора, то возникающая в обмотке ротора ЭДС подается в усилитель 18 и далее на обмотку управления 24 двигателя 19, ме.хаЕТически связанного с ротором. В процрссе отработки ротор устанавливается перпендикулярно потоку статора. При этом поворот стрелки-указателя 22, связанной с ротором относительно начального .индекса щкалы соотзетствуеп азимуту скважины. Скорость отработки следящей системы за счет увеличения постоянной времени усилителя 18 и передаточного отношения редуктора 20 выбирается малой. Это позволяет осреднять случайные колебания зенитного маятника с феррозондом, возникающие при движении прибора по скважине и тем самым увеличить точность измерения. Кроме того, следящая система позволяет непрерывно, в движении измерять азимут скважины, что увеличивает производительность труда (современные инклинометры измеряют азимут лищь при остановке прибора). Автоподстройка фазы опорного напряжения в зависимости от длины кабеля уменьщает влияние реактивной составляющей сопротивления кабеля на показания, что определяет высокую точность измерения и в сверхглубоких скважинах. Предлагаемое устройство обладает следующими достоинствами: потенциальной возможностью скважинных измерений при высоках температурах, т.к. в скважинном снаряде отсутствуют электронные узлы; возможностью значительного уменьщения габаритов скважинной части без снижения точности измерения, т.к. размеры определяются лишь данными феррозондов, , Формула изобрет.ения Устройство для измерения азимута скважины, содержащее маятник, магни
| название | год | авторы | номер документа |
|---|---|---|---|
| Феррозондовый датчик азимута | 1979 |
|
SU802535A1 |
| Феррозондовый датчик азимута | 1980 |
|
SU964119A2 |
| Феррозондовый преобразователь азимута | 1981 |
|
SU956773A1 |
| Преобразователь азимута | 1980 |
|
SU947408A1 |
| Инклинометр | 1981 |
|
SU994702A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
| Феррозондовый преобразователь азимута | 1979 |
|
SU863846A1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
