Изобретение относится к области измерительной техники и может быть использовано в нефтепромысловой геофизике для определения углового положения буровой скважины, а также в геомагнитной навигации для определения курса судна.
Известно устройство для определения углового положения буровой скважины (Ковшов Г. Н. , Сергеев А.Н. Цифровой преобразователь азимута с непрерывной регистрацией. /Геофизическая аппаратура. Л. , "Недра", 1980. Вып. 70. С. 110-115). Известное устройство состоит из наземного пульта и корпуса инклинометра (скважинного снаряда) с размещенными в нем наружной карданной рамкой с эксцентричным смещением центра тяжести, ось которой коаксиальна продольной оси цилиндрического корпуса инклинометра, корпусом внутренней карданной рамки, закрепленным на оси наружной карданной рамки, внутренней карданной рамки, ось которой закреплена на корпусе этой же рамки, двумя феррозондами с взаимно ортогональными осями чувствительности к вектору магнитной индукции, один из которых закреплен во внутренней карданной рамке с возможностью удержания оси этого феррозонда в горизонтальной плоскости и перпендикулярно оси вращения внутренней рамки, а второй феррозонд закреплен в наружной карданной рамке. Наземный пульт известного устройства состоит из источника стабильной частоты, двух идентичных каналов обработки сигналов с феррозондов и устройства преобразования сигнала азимута в градусной мере.
Известное устройство работает следующим образом. Продольная ось инклинометра, находящегося в буровой скважине, совпадает с направлением скважины. В наклонной скважине наружная карданная рамка, поворачиваясь, устанавливает ось вращения внутренней карданной рамки перпендикулярно к плоскости наклона скважины. После того как рамки установятся, оси обоих феррозондов будут находиться в горизонтальной плоскости, при этом ось феррозонда, закрепленного в наружной рамке, будет перпендикулярна плоскости наклона, а ось второго феррозонда - параллельна плоскости наклона, которая проходит через продольную ось инклинометра и вертикальную ось, пересекающую продольную ось инклинометра. С помощью источника стабильной частоты осуществляется перемагничивание магниточувствительных элементов феррозондов. В результате этого под действием горизонтальной составляющей геомагнитного поля в феррозондах возникают информационные напряжения вторых гармоник, амплитуды которых пропорциональны синусу и косинусу азимутального угла. Эти напряжения усиливаются, детектируются и модулируются двумя каналами обработки сигналов феррозондов. Промодулированные сигналы подаются на устройство преобразования сигнала в азимутальный угол в градусной мере, регистрация которого осуществляется блоком индикации этого устройства.
Известное устройство отличается сложностью конструкции, в состав которого входят два феррозондовых магнитометра и система двух подвижных элементов, чувствительных к вектору силы тяжести, выполненных в виде двух карданных рамок, которые с закрепленными на них феррозондовыми датчиками должны быть тщательно установлены по плавучести и дифференту. Погрешности балансировки карданных рамок, отклонение каждой из рамок от положения равновесия в процессе бурения скважины и частоты собственных колебаний рамок - все это приводит к погрешности определения углового положения корпуса известного устройства, а, значит, и углового положения скважины, в частности азимутального угла скважины (Ковшов Г. Н. , Солонина Н.Н. Увеличение виброустойчивости преобразователя угла установки отклонения. /Геофизическая аппаратура, Л.: "Недра". 1984. Вып. 79. С. 105-109).
Известен инклинометр (авт. свид. N 804822, 1981, БИ N 6), который по совокупности существенных признаков наиболее близок предлагаемому и принят за прототип. Известный инклинометр состоит из корпуса инклинометра; трехкомпонентного магниточувствительного датчика, размещенного в карданной рамке с одной степенью свободы относительно вращения этой рамки вокруг продольной оси корпуса инклинометра; груза-эксцентрика, закрепленного к карданной рамке; двух карданных подвесов, закрепленных на упомянутой карданной рамке с одной степенью свободы; двух однокомпонентных магниточувствительных датчиков, каждый из которых размещен на соответствующем карданном подвесе. При этом один однокомпонентный датчик размещен на карданном подвесе с возможностью измерения горизонтальной, а второй однокомпонентный датчик размещен на втором карданном подвесе с возможностью измерения вертикальной составляющих вектора магнитной индукции геомагнитного поля. С помощью груза-эксцентрика одна из осей чувствительности трехкомпонентного датчика ориентирована соосно продольной оси корпуса инклинометра, а вторая ось чувствительности этого датчика - перпендикулярна осям чувствительности датчиков, размещенных на карданных подвесах. Все рамки с датчиками размещены в корпусе инклинометра.
Известный инклинометр работает следующим образом. Под действием груза-эксцентрика, жестко связанного с карданной рамкой, которая может вращаться вокруг продольной оси корпуса инклинометра, трехкомпонентный датчик устанавливается так, что одна ось чувствительности датчика остается соосной с продольной осью корпуса инклинометра, вторая ось чувствительности трехкомпонентного датчика будет перпендикулярна к продольной оси корпуса инклинометра, а, значит, и к оси скважины и находится в плоскости наклона корпуса инклинометра (в плоскости наклона скважины), а третья ось чувствительности этого датчика остается ортогональной к первой и второй осям. Один из однокомпонентных датчиков находится в карданном подвесе и под действием груза устанавливается вертикально, а второй однокомпонентный датчик находится на втором карданном подвесе и под действием груза занимает горизонтальное положение. Таким образом, в известном инклинометре осуществляется измерение вертикальной и двух взаимно ортогональных горизонтальных составляющих вектора магнитной индукции геомагнитного поля. Вертикальная ось первого однокомпонентного датчика коллинеарна оси выбранной опорной системы координат направлена вниз. Вторая ось выбранной опорной системы координат направлена по касательной к магнитному меридиану в сторону севера. Направление этой оси определяют по направлению горизонтальной составляющей вектора магнитной индукции геомагнитного поля, равной векторной сумме двух измеренных горизонтальных составляющих вектора магнитной индукции. Третья ось выбранной опорной системы координат перпендикулярна первым двум направлениям и ориентирована в сторону востока. По сигналам с датчиков, пропорциональных составляющим вектора магнитной индукции геомагнитного поля на оси чувствительности датчиков, определяют расчетным путем азимутальный и зенитный углы корпуса инклинометра, а следовательно, и скважины, в которой находится корпус инклинометра.
В состав известного инклинометра входят три подвижных элемента, чувствительных к направлению вектора силы тяжести, выполненных в виде наружной карданной рамки и двух карданных подвесов, на которых размещены один трехкомпонентный и два однокомпонентных магниточувствительных датчика. Погрешности балансировки карданных подвесов от положения равновесия в процессе бурения скважины и частоты собственных колебаний карданных подвесов - все это приводит к погрешности определения углового положения корпуса инклинометра, а значит, и углового положения скважины (Ковшов Г.Н., Солонина Н.Н. Увеличение виброустойчивости преобразователя угла установки отклонителя. / Геофизическая аппаратура. Л.: "Недра", 1984. Вып. 79. С. 105-109), Наличие карданных подвесов приводит к увеличению веса инклинометра. Карданные подвесы в известном техническом решении, закрепленные на карданной рамке с осью вращения, совпадающей с продольной осью корпуса инклинометра, не обеспечивают возможности бурения скважины, у которой зенитный угол должен изменяться в пределах от 0o до 180o. Так, например, бурение двух скважин, начинающих с вертикальных направлений, а затем переходом на горизонтальные направления в нефтеносном слое с целью соединения этих скважин, требует высокой точности определения азимутального и зенитного углов этих скважин. Если погрешность определения азимутального угла равна 2o, то на расстоянии 2000 м от двух вертикальных скважин погрешность расхождения горизонтальных скважин может составить 70 м. Для бурения такой скважины можно было бы использовать один инклинометр при возможности измерения зенитного угла в пределах от 0o до 180o.
Задачей предлагаемого изобретения является создание инклинометра, отличающегося от известных простотой конструкции, меньшим весом, обеспечивающего измерение углового положения скважины, у которой зенитный угол может изменяться в пределах от 0o до 180o, а также возможного определения углового положения корпуса инклинометра.
Поставленная задача решается за счет использования одной карданной рамки с осью вращения, коллинеарной продольной оси корпуса инклинометра, измерении составляющих вектора магнитной индукции геомагнитного поля двумя однокомпонентными магниточувствительными датчиками, размещенными на карданной рамке, и тремя однокомпонентными магниточувствительными датчиками, жестко связанными с корпусом инклинометра, а также измерении составляющих вектора ускорения силы тяжести тремя акселерометрическими датчиками, жестко связанными с корпусом инклинометра.
Предлагаемый инклинометр, включающий корпус инклинометра с размещенной в нем карданной рамкой, ось вращения которой коллинеарна продольной оси корпуса инклинометра, груз-эксцентрик, размещенный на карданной рамке, два однокомпонентных магниточувствительных датчика, размещенных на карданной рамке, ось чувствительности одного из которых перпендикулярна плоскости, проходящей через ось вращения карданной рамки и центр тяжести груза-эксцентрика, а ось чувствительности второго - перпендикулярна оси чувствительности первого датчика и оси вращения карданной рамки, третий однокомпонентный магниточувствительный датчик, ось чувствительности которого коллинеарна оси вращения карданной рамки, четвертый и пятый однокомпонентные магниточувствительные датчики с взаимно ортогональными осями чувствительности, снабжен тремя акселерометрическими датчиками и распределителем напряжений, который подключен к выводам первого и второго магниточувствительных датчиков, при этом третий, четвертый и пятый магниточувствительные датчики и три акселерометрических датчика жестко связаны с корпусом инклинометра, ось чувствительности третьего магниточувствительного датчика перпендикулярна осям чувствительности четвертого и пятого магниточувствительных датчиков, ось чувствительности первого акселерометрического датчика коллинеарна оси чувствительности третьего магниточувствительного датчика, ось чувствительности второго акселерометрического датчика коллинеарна оси чувствительности четвертого магниточувствительного датчика и ось чувствительности третьего акселерометрического датчика коллинеарна оси чувствительности пятого магниточувствительного датчика.
Применение в предлагаемом техническом решении карданной рамки с грузом-эксцентриком, ось вращения которой коллинеарна продольной оси корпуса инклинометра, двух однокомпонентных магниточувствительных датчиков, размещенных на карданной рамке определенным образом, распределителя напряжений, подключенного к выводам этих датчиков, трех однокомпонентных магниточувствительных датчиков с взаимно ортогональными осями чувствительности и трех акселерометрических датчиков, жестко связанных с корпусом инклинометра, а также коллинеарность оси чувствительности одного из трех магниточувствительных датчиков, жестко связанных с корпусом инклинометра, оси вращения карданной рамки и коллинеарность осей чувствительности акселерометрических датчиков соответствующим осям чувствительности магниточувствительных датчиков, жестко связанных с корпусом инклинометра, обеспечивает определение как углового положения продольной оси корпуса инклинометра, а значит, и углового положения скважины, так и углового положения корпуса инклинометра по измеренным значениям составляющих вектора ускорения силы тяжести акселерометрическими датчиками и измеренным составляющим вектора магнитной индукции магниточувствительными датчиками при возможном изменении зенитного угла продольной оси корпуса инклинометра, а значит, и скважины в диапазоне от 0o до 180o, азимутального угла продольной оси корпуса инклинометра в диапазоне от 0o до 350o и апсидального угла корпуса инклинометра в диапазоне от 0o до 360o. Кроме того, в предлагаемом инклинометре по сравнению с прототипом на карданной рамке размещены не три, а два однокомпонентных магниточувствительных датчика и отсутствуют два карданных подвеса, что упрощает конструкцию и снижает вес предлагаемого инклинометра.
Таким образом, технический результат предлагаемого инклинометра выражается в упрощении конструкции и уменьшении веса инклинометра, а также возможности измерения углового положения скважины и корпуса инклинометра, у которых в процессе бурения зенитный угол может изменяться в пределах от 0o до 180o.
Сущность предлагаемого изобретения поясняется следующими графическими материалами.
На чертеже изображена структурная схема инклинометра.
Предлагаемый инклинометр состоит из корпуса инклинометра 1, карданной рамки 2, у которой ось вращения FF' коллинеарна продольной оси корпуса инклинометра 1 (на чертеже ось FF' совпадает с продольной осью корпуса инклинометра), груза-эксцентрика 3, размещенного на рамке 2, центр тяжести которого находится в точке A, к которой приложен вектор силы тяжести  груза-эксцентрика 3, двух однокомпонентных магниточувствительных датчиков 4 и 5, размещенных на карданной рамке 2, распределителя напряжений 6, подключенного к выводам датчиков 4 и 5, трех однокомпонентных магниточувствительных датчиков 7-9 с взаимно ортогональными осями чувствительности и трех акселерометрических датчиков 10-12, которые как и датчики 7-9 жестко связаны с корпусом 1. Оси чувствительности датчиков 7-9 коллинеарны осям чувствительности соответствующих датчиков 10-12. Ось чувствительности NN' датчика 7 коллинеарна оси вращения FF' рамки 2, ось чувствительности O'Y' датчика 5 перпендикулярна плоскости, проходящей через ось FF' и центр тяжести A груза-эксцентрика 3, а ось чувствительности OX' датчика 4 перпендикулярна оси FF', оси чувствительности OY датчика 5 и оси O'Z', которая коллинеарна оси FF'.
груза-эксцентрика 3, двух однокомпонентных магниточувствительных датчиков 4 и 5, размещенных на карданной рамке 2, распределителя напряжений 6, подключенного к выводам датчиков 4 и 5, трех однокомпонентных магниточувствительных датчиков 7-9 с взаимно ортогональными осями чувствительности и трех акселерометрических датчиков 10-12, которые как и датчики 7-9 жестко связаны с корпусом 1. Оси чувствительности датчиков 7-9 коллинеарны осям чувствительности соответствующих датчиков 10-12. Ось чувствительности NN' датчика 7 коллинеарна оси вращения FF' рамки 2, ось чувствительности O'Y' датчика 5 перпендикулярна плоскости, проходящей через ось FF' и центр тяжести A груза-эксцентрика 3, а ось чувствительности OX' датчика 4 перпендикулярна оси FF', оси чувствительности OY датчика 5 и оси O'Z', которая коллинеарна оси FF'.
Предлагаемый инклинометр работает следующим образом. Сигналы с датчиков 4,5, 7-9 пропорциональны проекциям вектора магнитной индукции геомагнитного поля на оси чувствительности этих датчиков (Ковшов Г.Н., Сергеев А.Н. Цифровой преобразователь азимута с непрерывной регистрацией./ Геофизическая аппаратура. Л.: "Недра", 1980. Вып. 70. С 110-115; Афанасьев Ю.В. Феррозондовые приборы. Л.: "Энергоатомиздат", 1986, 188 с.). Под действием груза-эксцентрика 3 рамка 2 поворачивается вокруг оси FF' так, что плоскость наклона скважины, проходящая через центр тяжести A груза-эксцентрика 3 и ось вращения FF' рамки 2, будет перпендикулярна оси чувствительности O'Y' датчика 5, при этом ось чувствительности OX' датчика 4 будет лежать в этой плоскости, а это значит, что она перпендикулярна осям O'Y' и FF'. Проекции вектора магнитной индукции геомагнитного поля на оси чувствительности датчиков 4, 5, 7-9 будут иметь следующий вид:
BX4 = -BXTcosαcosγ+BZTsinγ;
By5 = BXTsinα;
BZ7 = BXTcosαsinγ+BZTcosγ;
BX8 = (BZTsinγ-BXTcosαcosγ)sinβ-BXTsinαcosβ;
By9 = BXTsinαsinβ+(BZTsinγ-BXTcosαcosγ)cosβ,
где Bx4, By5, Bz7, Bx8, By9 - проекции вектора магнитной индукции геомагнитного поля на оси чувствительности соответствующих датчиков 4,5, 7-9; Bxт и Bzт - проекции вектора магнитной индукции геомагнитного поля на соответствующие оси OX и OY, выбранной опорной системы координат OXYZ, у которой ось OX совпадает с направлением горизонтальной составляющей вектора магнитной индукции Bxт геомагнитного поля, касательной к магнитному меридиану и направленной на северный магнитный полюс, ось OZ совпадает в северном полушарии с вертикальной составляющей вектора магнитной индукции Bzт геомагнитного поля и с вектором ускорения силы тяжести, а ось OY перпендикулярна осям OX и OZ и направлена в сторону востока; α и γ - азимутальный и зенитный углы скважины или продольной оси корпуса инклинометра, а β - апсидальный угол корпуса инклинометра (Ковшов Г.Н., Алимбеков Р.И., Сираев А. Х. Инклинометр для определения скважины и направления отклонителя. /Геофизическая аппаратура. Л.: "Недра", 1977. Вып. 62. С. 120-125).
Выходные сигналы с акселерометрических датчиков 10-12 (см. чертеж) пропорциональны проекциям вектора ускорения силы тяжести на оси чувствительности этих датчиков (Миловзоров Г.В. Моделирование и исследование инструментальных погрешностей трехкомпонентного акселерометрического преобразователя наклона. /М. : Измерительная техника, 1996. N 10. С. 22-26; Шваб И.А., Селезнев А.В. Измерение угловых ускорений. М. : "Машиностроение", 1983, 160 с.). Вектор ускорения силы тяжести перпендикулярен плоскости горизонта, поэтому выходные сигналы с датчиков 10-12, жестко связанных с корпусом инклинометра 1, пропорциональны направляющим косинусам n1, n2, n3 (Бронштейн И.Н., Семендяев К. А. Справочник по математике. М.: "Наука", 1967. С. 218, 219) оси OZ в системе координат, образованной осями чувствительности датчиков 10-12 или 7-9. По этим значениям направляющих косинусов определяют углы места Ψ и крена θ корпуса инклинометра 1 в системе координат OXYZ из следующих выражений:
θ = arctg(n2/n3);
Ψ = arctg(n1sinθ/n2);
или
Ψ = arctg(n1cosθ/n3).
Значение угла курса Φ корпуса инклинометра определяют по значениям углов θ,Ψ и проекций вектора магнитной индукции, измеренных датчиками 7-9, из следующих выражений:
Φ = arctg(E/S) при S>0;
Φ = arctg(E/S)+π при S<0,
где E = BZ7sinθ-By9cosθ;
S = BX8cosΨ+(By9sinθ+BZ7cosθ)sinΨ.
По значениям Φ,Ψ,θ определяют направляющие косинусы l1, m1, n1; l2, m2, n2; l3, m3, n3 соответствующих осей датчиков 8,9,7, а затем и углы α,γ,β (Бронштейн И.Н., Семендяев К.А. Справочник по математике. М.: "Наука", 1967. С 218, 219; Ефимов Н.В. Квадратичные формы и матрицы. М.: "Наука", 1972, 160 с.).
Значение Bzт определяют из следующего выражения:
BZT = -BX8sinΨ+(By9sinθ+BZ7cosθ)cosΨ,
а значение Bxт - по одному из двух следующих выражений, у которого модуль знаменателя имеет наибольшее значение:
BXT = (BZ7sinθ-By9cosθ)/sinΦ;
При n2 = cosΨsinθ и n3 = cosΨcosθ = cosγ, близких к нулю, в частности при cosΨ, стремящимся к нулю, существенно возрастает погрешность определения углового положения корпуса инклинометра, а значит, и углового положения скважины по изложенному алгоритму. В этом случае определение углового положения скважины и корпуса инклинометра следует осуществлять с использованием измеренных проекций вектора магнитной индукции геомагнитного поля датчиками 4 и 5 (см. чертеж) и значения |cosγ| , измеренного с помощью акселерометрических датчиков 10-12.
Из первого и третьего уравнений для Bx4 и Bz7 определяют по два значения косинуса и синуса зенитного угла:
sinγ1 = (BZT-BZ7cosγ1)/BX4;
sinγ2 = (BZT-BZ7cosγ2)/BX4.
Затем определяют разности модулей |cosγ|-|cosγ1| и |cosγ|-|cosγ2| . Действительное значение cosγ1 или cosγ2/ будет соответствовать той разности, которая равна нулю или имеет по модулю наименьшее значение. По cosγ определяют sinγ , а затем и угол γ из следующих выражений:
γ = arctg(sinγ/cosγ) при cosγ>0;
γ = arctg(sinγ/cosγ)+π при cosγ<0.
Значение sinα определяют из второго уравнения для By5
sinα = By5/BXT,
а значение cosα определяют из первого или третьего уравнений
Угол α определяют аналогично, как и угол γ. Подставляя значения α и γ в четвертое и пятое уравнения для Bx8 и By9, определяют значение угла β. Углы α и γ определяют угловое положение скважины, а совокупность углов α,γ,β - угловое положение корпуса инклинометра.
В предлагаемом инклинометре сигналы, пропорциональные измеренным проекциям вектора магнитной индукции геомагнитного поля с датчиков 4 и 5 (см. чертеж), подаются на распределитель напряжений 6, который обеспечивает подачу упомянутых сигналов на устройство обработки информации.
Таким образом, инклинометр обеспечивает определение углового положения как скважины, так и корпуса инклинометра. Наличие в предлагаемом техническом решении по сравнению с прототипом только одной карданной рамки с осью вращения, коллинеарной оси скважины, упрощает конструкцию и снижает вес инклинометра. Кроме того, предлагаемый инклинометр обеспечивает возможность определения углового положения скважины и корпуса инклинометра при любом направлении ствола скважины, то есть при изменении ее зенитного угла от 0o до 180o, азимутального угла от 0o до 360o и апсидального угла от 0o до 360o.
Использование в заявляемом техническом решении вычислительного блока позволит автоматизировать процесс определения углового положения скважины и углового положения корпуса инклинометра.
Для этого выводы датчиков предлагаемого инклинометра следует подключить через усилительно-преобразовательные блоки, например, к преобразователю измерительному многоканальному (ПИМ-1, сертификат N 15660-96, Госстандарт России), разработанному АО "АТИС" (г. С.-Петербург). В предлагаемом техническом решении магниточувствительные датчики в совокупности с усилительно-преобразовательными блоками (каждый блок состоит из усилителя, синхронного детектора и генератора переменной ЭДС) могут быть выполнены аналогично, как и в известном устройстве (Афанасьев Ю.В. Феррозондовые приборы. Л.: "Энергоатомиздат", 1986. С. 108-110, 117, 127-139, 162-168; Ковшов Г.Н., Сергеев А. П. Цифровой преобразователь азимута с непрерывной регистрацией. / Геофизическая аппаратура. Л.: "Недра", 1980. Вып. 70. С. 112), распределитель напряжений может быть реализован аналогично, как и в инклинометре (Ковшов Г. Н. , Сергеев А.П. Цифровой преобразователь азимута с непрерывной регистрацией. /Геофизическая аппаратура. Л. : "Недра", 1980. Вып. 70. С. 110-115), а акселерометрические датчики могут быть выполнены аналогично известным акселерометрическим датчикам (Мельников В.Е. Электромеханические преобразователи на базе кварцевого стекла. М.: "Машиностроение". 1984. 160 с.; Шваб И.А. , Селезнев А.В. Измерение угловых ускорений. М.: "Машиностроение". 1983. 160 с.). В предлагаемом инклинометре могут быть использованы двухкомпонентные и трехкомпонентные магниточувствительные датчики с совмещенными магнитными центрами вместо двух однокомпонентных датчиков, размещенных на карданной рамке, и трех однокомпонентных датчиков, жестко связанных с корпусом инклинометре (Афанасьев Ю.В. Феррозондовые приборы. Л.: "Энергоатомиздат", 1986. С. 55).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ БУРОВОЙ СКВАЖИНЫ (ЕГО ВАРИАНТЫ) | 2004 |
|
RU2261324C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2319157C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
Изобретение относится к измерительной технике и может быть использовано в нефтепромысловой геофизике для определения углового положения буровой скважины и в геомагнитной навигации для определения курса судна. Инклинометр содержит корпус с карданной рамкой, груз-эксцентрик, два однокомпонентных магниточувствительных датчика, три акселерометрических датчика, три магниточувствительных датчика и распределитель напряжений. Ось вращения карданной рамки коллинеарна продольной оси корпуса инклинометра. Груз-эксцентрик и два однокомпонентных магниточувствительных датчика размещены на карданной рамке определенным образом. Распределитель напряжений подключен к выводам первого и второго магниточувствительных датчиков. Три акселерометрических датчика и три магниточувствительных датчика с ортоганальными осями чувствительности жестко связаны с корпусом инклинометра. Ось чувствительности третьего магниточувствительного датчика коллинеарна оси вращения карданной рамки. Оси чувствительности акселерометрических датчиков коллинеарны соответствующим осям чувствительности магниточувствительных датчиков. Технический результат состоит в упрощении конструкции, уменьшении веса, измерении углового положения корпуса инклинометра и скважины, зенитный угол которой изменяется от 0 до 180°. 1 ил.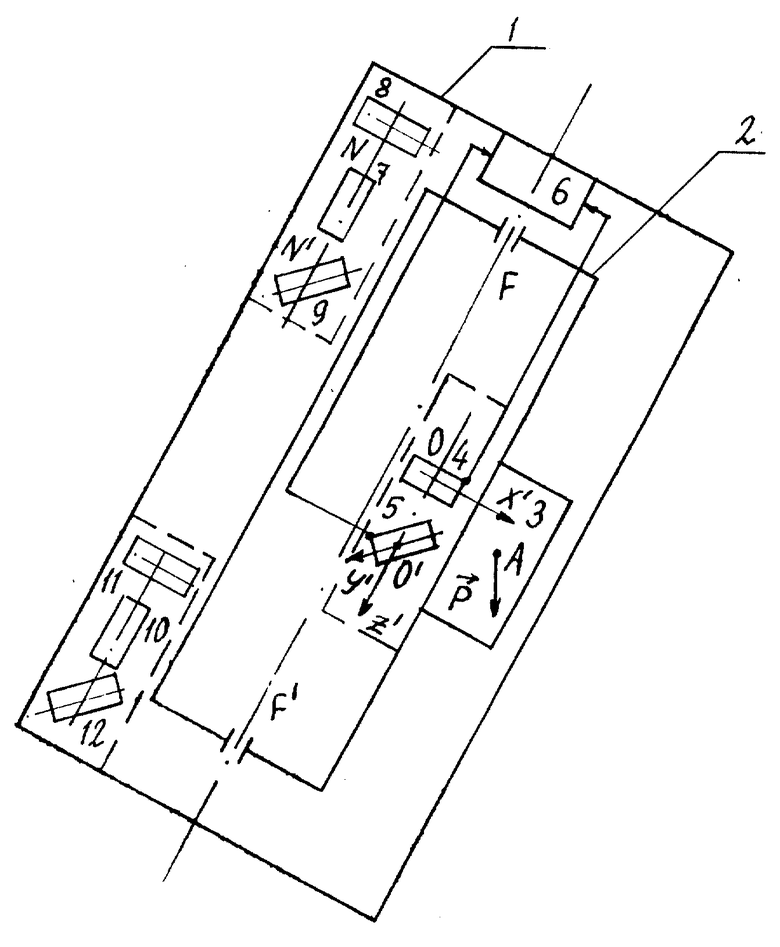
Инклинометр, включающий корпус инклинометра с размещенной в нем карданной рамкой, ось вращения которой коллинеарна продольной оси корпуса инклинометра, груз-эксцентрик, размещенный на карданной рамке, два однокомпонентных магниточувствительных датчика, размещенных на карданной рамке, ось чувствительности одного из которых перпендикулярна плоскости, проходящей через ось вращения карданной рамки и центр тяжести груза-эксцентрика, ось чувствительности второго - перпендикулярна оси чувствительности первого датчика и оси вращения карданной рамки, третий однокомпонентный магниточувствительный датчик, ось чувствительности которого коллинеарна оси вращения карданной рамки, четвертый и пятый однокомпонентные магниточувствительные датчики с взаимно ортогональными осями чувствительности, отличающийся тем, что он снабжен тремя акселерометрическими датчиками и распределителем напряжений, который подключен к выводам первого и второго магниточувствительных датчиков, при этом третий, четвертый и пятый магниточувствительные датчики и три акселерометрических датчика жестко связаны с корпусом инклинометра, ось чувствительности третьего магниточувствительного датчика перпендикулярна осям чувствительности четвертого и пятого магниточувствительных датчиков, ось чувствительности первого акселерометрического датчика коллинеарна оси чувствительности третьего магниточувствительного датчика, ось чувствительности второго акселерометрического датчика коллинеарна оси чувствительности четвертого магниточувствительного датчика, ось чувствительности третьего акселерометрического датчика коллинеарна оси чувствительности пятого магниточувствительного датчика.
| Инклинометр | 1979 |
|
SU804822A1 |
| US 3587175 A, 28.06.1971 | |||
| ВНУТРИШЛЮЗОВОЕ, СЕГМЕНТАРНОЕ СЪЕМНОЕ УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ЗОЛОТА, ПЛАТИНЫ ИЗ ПУЛЬПЫ ПРОМЫШЛЕННЫХ ГИДРОПРОМЫВНЫХ ПРИБОРОВ | 2003 |
|
RU2314163C2 |
| ПАТРОН ДЛЯ ЭЛЕКТРИЧЕСКИХ ЛАМП С БЛОКИРУЮЩИМ УСТРОЙСТВОМ | 1995 |
|
RU2086055C1 |
| УСТАНОВКА ОЧИСТКИ ФЕКАЛЬНО-БЫТОВЫХ СТОКОВ | 1999 |
|
RU2170216C1 |

