Изобретение относится к области приборостроения, а именно к устройствам, предназначенным Jaля контроля работоспособности оператора и регистрации величины текущей ошибки для последующего анализа на ЭВМ основны параметров его деятельности. Устройство может быть использова но для профессионального отбора, об чения и оперативного контроля за деятельностью операторов в замкнуты системах полуавтоматического управления. Устройство может быть также использовано при исследованиях динамики психофизиологических парамет ров оператора при воздействии на не различных факторов и помех. Известно устройство, в котором использованы тесты на преследующее слежение с выведением оценки качества по величине ошибки рассогласо вания, содержащее блок управления визиром оператора, блок визуальной индикации, блок задания программа ошибки слежения и блок магнитной ре гистрации однако оно представляет собой сложный -стационарный комплекс, который жестко связан с ЭВМ и не может быть использован в п ;оизводственных условиях. Недостатком этого устройства является также отсутствие системы автоматического установления оптимальных, параметров теста, что приводит к необходимости ручного регулирования в процессе теста и при изменении условий проведения эксперимента. Наиболее близким по технической сущности к изобретению является устройство для контроля работоспособности оператора, содержащее блок визуальной индикации, к входам которого подключены выходу блока задания траектории метки и блока управления визиром оператора, которые также связаны через блок вычисления ошибки слежения с регистратором ошибок 2. Однако блок задания траектории у этого устройства слишком сложен в схемном отношении и, кроме того, оно обладает недостаточным количеством выходных регистрируемых параметров. Целью изобретения является расширение функциональных возможностей устройства, повышение объективности контроля и упрощение устройства. Поставленная цель достигается тем, что в устройство введены два генератора
линейно изменяющегося напряжения, коммутатор, нуль-орган и две цепи, каждая из которых состоит из последовательно соединенных блока памяти и инерционного звена, при этом нульорган включен между выходом олока вычисления ошибки слежения за и управляющим входом коммутатора, выходы которого соответственно соединены с генераторами и входами вяоков памяти, а выходы инерционных звеньев являются выходами блока задания траектории метки.
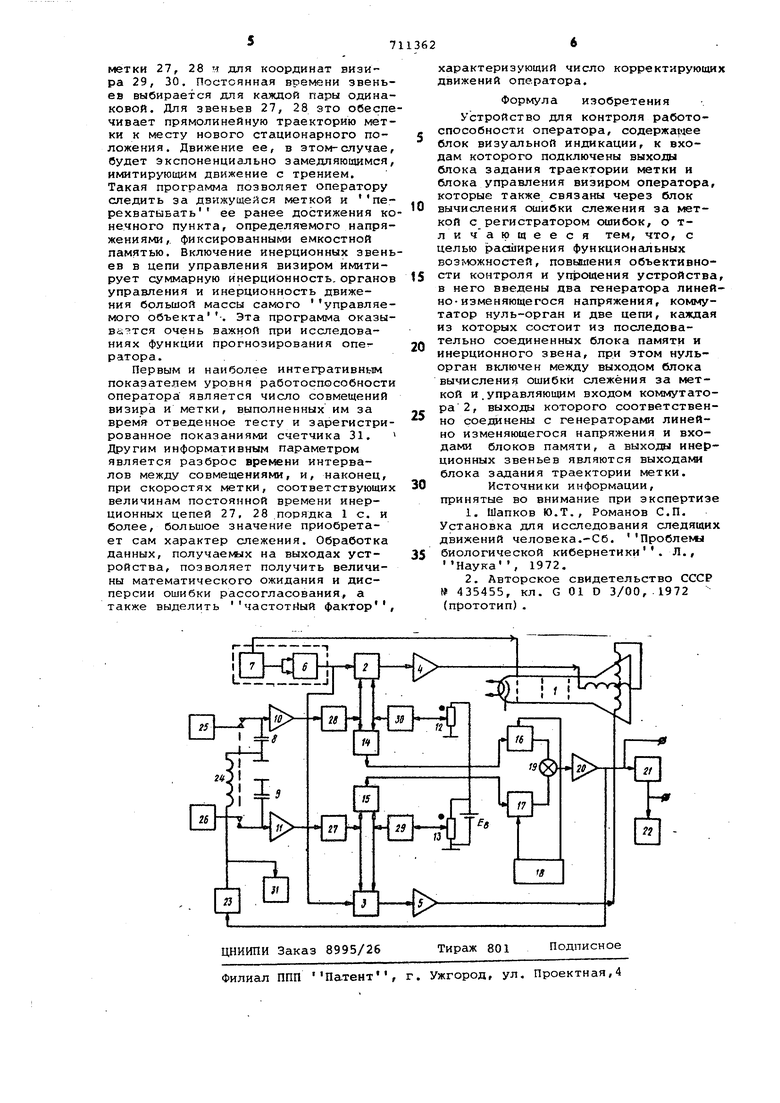
На чертеже представлена структурног-функциональная схема предложенного устройства, где блок индикации содержит электроннолучевую труоку (ЭЛТ) 1 визуальной индикации, коммутаторы 2 и 3, каналов, усилители 4 и 5 отклоняющей системы ЭЛТ, управляющий коммутаторами триггер .6 и запускающий его,генератор 7 импульсов. В блоке задания траектории метки содержатся конденсаторы емкостнрй памяти 8 и 9 и согласующие усилители 10 и 11 блока памяти. Управление визиром оператора осуществляется потенциометрами 12 и 13. Ошибки рассогласования вьСделяются в схемах вычитания 14 и 15 блока вычисления ошибки слежения, который также содержит модуляторы 16 и 17, генератор импульсов 18, линейный сумматор 19, резонансный усилитель 20, аналогоцифровой преобразователь 21 и магнитный регистратор 22. Аналоговый сигнал ошибки с усилител 20 поступает также на нуль-орган 23 на выходе которо1 о включен комм татор 24, подсоединяющий генераторы линейно изменяющегося напряжения 25 и 26 к емкостям блока памяти 8 и 9. Сигналы с согласующих усилителей 10 и 11 поступают к схемам вычитания 14 и 15 через инерционные звенья 27 и 28, а сигналы с потенциометрОЕ ручки оператора через инерционные звенья 29 и 30. Последним узлом схемл является счетчик л.
Устройство работает следуюгдим образом.
На экране ЭЛТ высвечиваются две Tq4KM: преследуемая метка и виэир , управляемой .оператором. Координаты этих точек определяются амплитудой прямоугольных импульсов, поступающих поочередно с выходов канальных коммутаторов (2,3) на входы соответствующих усилителей (4,5) отклоняющей системы ЭЛТ. Коммутаторы управляются сигнепами с выходов триггера 6, который запускается короткими импульсами с генератора 7. Эти же импульсы гасят луч ЭЛТ при переключении каналов. На входы блоков вычисления ошибки рассогласования и визуального индикатора поступают напряжения, определяющие координаты метки EXN и Еум и напряжения, определяющие координаты визира оператора ЕХЬ и Еуь с потенциометров 12 и 13 ручки управления визиром.Ошибки слежения,представленные напряжениями рассогласования f по обоим координатам (т.е. ЛЕх и ДЕ) выделяются в узлах схем вычитания 14 и 15 и далее в модуляторах 16, 17, превращаются в последовательность прямоугольных импульсов, час. тота повторения которых выбирается
порядка нескольких килогерц. Для получения геометрической сумма и вычисления модуля вектора рассогласования, на модуляторы подаются импульсы несущей частоты с генератора 18,
5выходы которого имеют постоянный сдвиг фазы в 90. Модулированные по закону изменения ЛХ и ДУ импульсы суммируются в линейном сумматоре 19, после чего из полученного ступенчатого сигнала резонансным усилителем 20 выделяется первая гармоника. Этот сигнал, имеющий амплитуду, пропорциональную модулю вектора рассогласования, выпрямляется и подает5 3 аналоговый выход для регистрации. Блок предварительной обработки результатов теста включает в себя также простой аналогоцифровой преобразователь 21, превращающий униполярное, медленно изменяющееся напряжение в последовательность стандартных импульсов, которые могут непосредственно вводится в ЭВМ или регистрироваться при помощи магнитофона для последующей обработки и анализа
5 22. .
Когда оператор (при помощи рукоятки управления) совместит визир с меткой и сигнал ошибки рассогласования на выходе усилителя 20 станет равным нулю, срабатывает нуль-орган 23, на выходе которого включено релекоммутатор 24. Это реле подключает на короткое время конденсаторы ем- костной памяти 8, 9 к выходам двух
5 несинхронизированных генераторов линейного пилообразного напряжения 25, 26, и они фиксируют мгновенное значение напряжений, определяющих новые (случайные) координаты метки на
0 экране ЭЛТ. Таким образом, как только цель будет накрыта она появляется в новой/ случайно выбранной точке. Линейно ломанная случайная траектория метки обеспечиг вается тем, что даже небольшие вариации времени интервалов между совмещениями метки и визира оказываются во много раз больше периодов пилообразного сигнала генераторов. Время, необходимое метке для перехода в
0 новое положение, может быть практически равным нулю, но может и иметь онечное, 3apiaHee выбранное значение. Определяется время перехода величиной постоянной времени инерционных звень5 03,включенных попарно для координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор бимодального слежения | 1983 |
|
SU1123641A1 |
| Устройство для считывания графической информации | 1979 |
|
SU960869A2 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
| Устройство для считывания графической информации | 1979 |
|
SU877584A1 |
| Устройство для съема координат с экрана электронно-лучевой трубки | 1982 |
|
SU1049896A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1091212A1 |
| Устройство для ввода и вывода информации | 1977 |
|
SU690473A1 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ | 1980 |
|
SU1840988A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
