Изобретение относится к области оптико-электронных систем управления, предназначенных преимущественно для автоматического сопровождения подвижных объектов с перемещающегося основания.
Известна оптико-электронная система для сопровождения объектов со следящим стробом, имеющая полуавтоматический и автоматический режим работы. Она содержит телевизионную камеру, устройство обработки видеосигнала, решающее устройство, интегратор, задающее устройство, привод наведения [1] (стр. 232, рис. 7.17). Недостатком данной оптико-электронной системы является невозможность сопровождения объектов при перерыве оптической связи из-за отсутствия функциональных блоков для прогнозирования координат объекта.
Известно также оптико-электронное устройство [2] (стр. 110-112, рис. 3.23), состоящее из связанных между собой оптико-электронного пеленгатора и привода с усилителем мощности. Эта система имеет входы приема оптического сигнала, внешнего целеуказания и коррекции. В процессе сопровождения разворот пеленгатора на объект осуществляется приводом по сигналам от пеленгатора. Недостатком этой системы является отсутствие измерителей качек, что затрудняет использование этой системы на носителях, подверженных воздействию качек. Кроме того, отсутствие функциональных блоков для прогнозирования координат объекта не позволяет осуществлять сопровождение при перерыве оптической связи с ним.
Известна следящая система [2] (стр. 228, 229, рис.6.7), состоящая из последовательно соединенных датчика поступательного движения, вычислителя, гиростабилизатора, пеленгатора и усилителя мощности, выход которого соединен со вторым входом гиростабилизатора. Данная система позволяет осуществлять работу с качающегося основания. Однако в связи с тем, что для стабилизации используется гиропривод, отсутствует практическая возможность стабилизации массивных оптических приборов, т.е. приборов с большими фокусными расстояниями и диаметрами входного зрачка. Это не позволяет обеспечить сопровождение объектов, находящихся на большой дальности, либо имеющих малый контраст относительно фона. Эта система также неспособна к инерционному сопровождению объекта.
В литературе описана также следящая система [2] (стр. 229, 230, рис. 6.8), состоящая из последовательно соединенных датчика угловой скорости, сумматора, усилителя мощности, двигателя и пеленгатора. Выход пеленгатора соединен со вторым входом сумматора. В этой системе датчик угловой скорости, сумматор, усилитель мощности и двигатель выполняют функции устройства наведения и стабилизации. Недостатком известной оптико-электронной системы сопровождения является недостаточная точность слежения при отсутствии оптической связи с объектом и вследствие этого невозможность автоматизированного перевода системы в автоматический режим после восстановления оптической связи с объектом. Это объясняется отсутствием устройств для прогнозирования координат движения объекта и сравнения прогнозируемых координат движения объекта с текущими координатами устройства наведения и стабилизации. В результате этого в течение времени прерывания оптической связи возможен уход объекта из поля зрения оптико-электронной системы и потеря объекта. В данной системе повторный захват объекта на автосопровождение возможен лишь путем точного совмещения изображения объекта со стробом (окном анализа), что затруднительно при значительном рассогласовании положений объекта и строба в картинной плоскости пеленгатора. Кроме того, отсутствие устройств для динамической коррекции не позволяет в достаточной мере реализовать возможности исполнительного устройства.
Наиболее близким к предлагаемому техническому решению является описанное в [3] телевизионное устройство измерения координат и скорости. Оно состоит из генератора полустробов (окон анализа), блока управления, последовательно соединенных узла поворота, телевизионной камеры (оптико-электронного прибора), координатного дискриминатора (для определения координат объекта в стробе), последовательно соединенных бинарного квантователя, счетчика, блока сравнения и блока определения координаты и скорости объекта. Первый выход координатного дискриминатора соединен со входом бинарного квантователя. Выход блока сравнения соединен с первым входом блока определения координат и скорости (БОКС). Второй и третий выходы координатного дискриминатора (по координатам объекта в стробе) соединены со вторым и третьим входами блока определения координат и скорости. Первый выход блока управления соединен с первым входом узла поворота и четвертым входом блока определения координат и скорости, а второй выход - со вторым входом узла поворота и пятым входом блока определения координат и скорости. Первый и второй выходы БОКС (по координатам объекта в растре) соединены с первым и вторым входами генератора полустробов, а третий, четвертый пятый и шестой его выходы - соответственно с первым, вторым, третьим и четвертым входами блока управления. Выходы генератора полустробов с первого по четвертый соединены соответственно со вторым, третьим, четвертым, пятым входами координатного дискриминатора. Блок управления и узел поворота образуют в этой оптико-электронной системе устройство наведения и стабилизации. Координатный дискриминатор и генератор полустробов образуют в совокупности блок определения координат объекта в стробе.
Эта оптико-электронная система сопровождения (ОЭСС) позволяет производить автоматическое слежение за объектом и не прерывать движение при кратковременном перерыве оптической связи за счет "замораживания" координат строба. Однако недостатком ее является недостаточная точность сопровождения при длительном перерыве оптической связи, в том числе из-за возмущений, вызываемых работой комплекса, куда входит ОЭСС. Это обусловлено тем, что в ее составе отсутствует устройство, обеспечивающее прогнозирование координат объекта и сравнение прогнозируемых координат с текущим положением устройства наведения и стабилизации. Кроме того, в процессе воздействия возмущений от комплекса изображение объекта может изменять свой образ, а увеличение уровня помех в видеосигнале может создать условия для неверной идентификации объекта и ложного захвата. При длительном перерыве оптической связи с объектом из-за накопления ошибок перемещения возможен уход объекта из следящего строба. В результате этого при восстановлении оптической связи повторный захват на автосопровождение возможен лишь путем вмешательства человека-оператора для совмещения изображения объекта со следящим стробом, с последующим переводом оператором системы в автоматический режим.
Задачей настоящего изобретения является повышение точности сопровождения объекта при перерыве оптической связи и в условиях возмущений, вызванных работой комплекса, увеличение допустимого времени нахождения в инерционном режиме, снижение вероятности срыва сопровождения объекта, снижение вероятности ложного захвата объекта.
Эта задача выполняется за счет того, что в оптико-электронную систему, содержащую последовательно соединенные устройство наведения и стабилизации, оптико-электронный прибор и блок определения координат в стробе, введены последовательно соединенные датчик возмущения, формирователь логики инерционного сопровождения и устройство прогнозирования координат, а также последовательно соединенные блок задания программного перемещения, первый коммутатор, блок формирования координат в растре и второй коммутатор. При этом первый, второй, третий, четвертый и пятый выходы блока определения координат в стробе соединены соответственно с первым и вторым входами блока задания программного перемещения, вторым и третьим входами первого коммутатора и вторым входом формирователя логики инерционного сопровождения, третий вход которого является входом внешнего управления, а второй и третий выходы соединены соответственно со вторым входом блока определения координат в стробе и вторым входом второго коммутатора. Выход блока формирования координат в растре соединен с третьим входом блока определения координат в стробе и вторым входом устройства прогнозирования координат, третий вход которого соединен со вторым выходом устройства наведения и стабилизации, а выход - с третьим входом второго коммутатора, чьи первый и второй выходы соединены с первым и вторым входами устройства наведения и стабилизации.
На чертеже представлена функциональная схема оптико-электронной системы сопровождения. Система содержит последовательно соединенные оптико-электронный прибор (ОЭП) 1, блок определения координат в стробе (БОКСт) 2, блок задания программного перемещения (БЗПП) 3, первый коммутатор 4, блок формирования координат в растре (БФКР) 5, второй коммутатор 6, устройство наведения и стабилизации (УНС) 7, первый выход которого кинематически связан с ОЭП, а также последовательно соединенные датчик возмущений (ДВ) 8, формирователь логики инерционного сопровождения (ФЛИС) 9 и устройство прогнозирования координат (УПК) 10. При этом второй, третий, четвертый и пятый выходы блока определения координат в стробе соединены соответственно со вторым входом блока задания программного перемещения, вторым и третьим входами первого коммутатора и вторым входом формирователя логики инерционного сопровождения. ФЛИС 9 имеет также третий вход управления от внешних систем. Второй и третий выходы ФЛИС соединены соответственно со вторыми входами БОКСт 2 и второго коммутатора 6. Выход БФКР 5 помимо второго коммутатора связан с третьим входом БОКСт и вторым входом УПК 10, третий вход которого соединен со вторым выходом УНС 7. Третий вход второго коммутатора 6 подключен к выходу УПК. Второй вход УНС связан со вторым выходом второго коммутатора.
Все блоки, необходимые для реализации оптико-электронной системы, являются известными либо могут быть реализованы из известных компонентов путем их использования известными методами.
В качестве оптико-электронного прибора могут быть использованы телевизионные камеры, тепловизоры, субмиллиметровые телескопы, визуализаторы ультрафиолетового и рентгеновского излучений. Блок определения координат в стробе может быть реализован аналогично прототипу. Блок задания программного перемещения может быть реализован на аналоговой или цифровой элементной базе по схемотехническим решениям, аналогичным генераторам строчной и кадровой развертки телевизионного сигнала. Первый и второй коммутаторы могут быть выполнены на реле, герконах, электронных коммутаторах и т.п. Блок формирования координат в растре может представлять собой интегратор или накапливающий сумматор. Устройство наведения и стабилизации может быть использовано аналогичным [2] (стр. 229, 230, рис.6.8). Его также можно реализовать из последовательно соединенных преобразователя координат из измерительной системы координат ОЭП в стабилизированную сферическую систему координат, коммутатора, корректирующего устройства, преобразователя координат из стабилизированной в нестабилизированную сферическую систему координат и исполнительного устройства. При этом преобразователи координат могут быть реализованы, как это описано в [4], корректирующее устройство может быть реализовано с использованием операционных усилителей (см. [5]), передаточные функции которых могут быть выбраны с использованием методов, изложенных в [6], исполнительное устройство может представлять собой пневматический, гидравлический, электропривод, в том числе на базе двух- и трехкоординатных моментных двигателей, и т.п. Датчик возмущений может быть датчиком вибраций, задымленности, оптического излучения и т.д. в зависимости от характера ожидаемого воздействия. Он также может включать в себя счетчик времени, когда, например, физически возможно или целесообразно измерить только передний фронт возмущения. Формирователь логики инерционного сопровождения может быть выполнен на базе логических микросхем [7]. Устройство прогнозирования координат представляет собой вычислительное устройство [8] , рассчитывающее параметры траектории объекта в соответствии с принятой гипотезой о его движении и использующее эти параметры в периоды инерционного сопровождения. Оно может вести расчет в сферической либо декартовой системе координат. В первом случае в его состав входят последовательно соединенные формирователь полной координаты объекта, преобразователь нестабилизированных координат в стабилизированные, устройство расчета траектории объекта, устройство сравнения расчетных и текущих координат, второй вход которого соединен с выходом преобразователя нестабилизированных координат в стабилизированные. Во втором случае необходимо использовать два дополнительных преобразователя координат:
- стабилизированных сферических в декартовы - перед подачей сигнала в устройство расчета траектории объекта;
- декартовых в стабилизированные сферические - перед входом в устройство сравнения расчетных и текущих координат.
Работа оптико-электронной системы сопровождения осуществляется следующим образом (для простоты описание приведено для одной координаты).
При автосопровождении объекта оптико-электронный прибор 1 формирует видеосигнал и подает его на вход блока определения координат в стробе 2. БОКСт 2 вычисляет функционал соответствия между эталонным изображением, записанным в его памяти и текущими изображениями в стробе. Наиболее близкое к эталонному изображение принимается за изображение объекта, координаты которого поступают через первый коммутатор 4 на блок формирования координат в растре 5. Выходная координата БФКР, полученная, например, путем суммирования предыдущей координаты БФКР с текущей координатой БОКСт, подается в БОКСт для задания координат строба в следующем кадре (полукадре). Через второй коммутатор 6 этот же сигнал поступает на первый вход устройства наведения и стабилизации 7, выходной вал которого перемещает ОЭП 1 таким образом, чтобы изображение объекта сместилось к центральной части растра (оптической оси ОЭП). Сигнал со второго выхода устройства наведения и стабилизации 7 об ожидаемом положении объекта в пространстве поступает в устройство прогнозирования координат 10, где с использованием полученной из БФКР 5 координаты объекта в растре формируется полная координата объекта. На основании этих координат и принятой гипотезы о траектории объекта в УПК 10 рассчитываются параметры этой траектории с использованием, например, методов наименьших квадратов, наибольшего правдоподобия, сплайн-функций и т.п.
Рассмотрим теперь возможные случаи инерционного сопровождения. Пусть функционал, рассчитываемый БОКСт 2, оказывается для всех объектов в стробе меньше заданного уровня, либо в течение нескольких кадров подряд координата БОКСт максимальна по уровню. Первый случай можно трактовать как перерыв оптической связи с объектом, а второй - как срыв автосопровождения. Блок определения координат в стробе формирует соответствующий признак, выдает его в формирователь логики инерционного сопровождения и обнуляет свою выходную координату. До принятия во ФЛИС 9 решения о варианте инерционного сопровождения движение ОЭП продолжается в том же порядке, что было описано для автоматического режима, при этом координата с выхода БФКР не меняется. В такой структуре инерционное сопровождение может продолжаться с допустимой погрешностью несколько кадров. Выработав решение о переходе на сопровождение по прогнозируемым координатам, ФЛИС 9 выдает управляющие сигналы в БОКСт 2, УПК 10 и на второй коммутатор 6. По получении сигнала из формирователя логики инерционного сопровождения о начале сопровождения по прогнозируемым координатам блок определения координат в стробе выдает со своего четвертого выхода на третий вход первого коммутатора 4 сигнал управления, по которому третий выход БОКСт 2 отключается от блока формирования координат в растре 5. Устройство прогнозирования координат 10, получив сигнал от ФЛИС 9, выполняет следующие операции: во-первых, в зависимости от признака предшествующего состояния из данных для расчета параметров траектории объекта периоды времени, в течение которых информация могла быть недостоверной (например, период времени, когда движение ОЭП осуществлялось по "замороженным" координатам, либо период времени, когда БОКСт выдавал непрерывно предельное значение); во-вторых, прекращается расчет параметров траектории объекта; в-третьих, начинает расчет прогнозируемых координат, используя параметры траектории, и сравнивает прогнозируемые координаты с текущими. Второй коммутатор 6 по сигналу от ФЛИС 9 отключает первый вход устройства наведения и стабилизации 7 от выхода блока формирования координат в растре 5 и подключает второй вход УНС к выходу УПК (по рассогласованию прогнозируемых и текущих координат). Необходимость второго входа УНС 7 обусловлена тем, что координаты БФКР 5 вырабатываются в измерительной системе координат ОЭП 1, а рассогласование прогнозируемых и текущих координат - в стабилизированной сферической. Поэтому для ограничения одним входом пришлось бы либо предварительно пересчитывать координаты БФКР в стабилизированную систему координат, либо наоборот - координаты УПК в измерительную систему координат. Таким образом создается замкнутый контур слежения по прогнозируемым координатам. В таком контуре накопление ошибок сопровождения происходит медленнее, чем при простом "замораживании" координат БФКР 5.
Следует отметить, что ожидать сигнала от БОКСт 2 для перехода на сопровождение по прогнозируемым координатам не всегда целесообразно, особенно в тех случаях, когда помехи, мешающие работе ОЭСС, создаются самим комплексом, куда она входит. Для реализации такого варианта инерционного сопровождения в предлагаемой системе предлагается использовать датчик возмущений 8. По сигналу о начале возмущения формирователь логики инерционного сопровождения переводит ОЭСС в режим сопровождения по прогнозируемым координатам. При этом со второго выхода ФЛИС 9 на второй вход блока определения координат в стробе 2 выдается признак запрещения восстановления автосопровождения в течение всего времени действия возмущения. Такая организация режима препятствует ложному захвату объекта в процессе действия возмущения.
Может иметь место вариант, когда БОКСт 2 в процессе автосопровождения осуществил переход на другой объект. Для облегчения восстановления перехода на сопровождение истинного объекта с использованием информации о его траектории предусмотрен третий вход на ФЛИС 9. По получении этой команды, например от оператора или устройства, анализирующего траекторию объекта, ФЛИС переводит ОЭСС в режим сопровождения по прогнозируемым координатам, а на БОКСт 2 выдает признак запрета автоматического восстановления автосопровождения.
Восстановление автосопровождения объекта в предлагаемой системе предлагается осуществлять следующим образом. Если в сигнале от формирователя логики инерционного сопровождения 9 отсутствует признак запрета на автоматическое восстановление автосопровождения (признак изначально не вырабатывался, либо окончилось возмущающее воздействие, либо оптическая помеха вышла за пределы центральной части растра и т.п.), блок определения координаты в стробе 2 формирует следующие сигналы: на первый вход блока задания программного перемещения 3 выдает текущие координаты строба, на второй вход БЗПП выдается команда на запуск программы сканирования, а на третий вход первого коммутатора - команда, по которой выход БЗПП 2 подключается ко входу БФКР 5. Одновременно БОКСт начинает анализировать изображение в стробе, сравнивая его с эталонным изображением, по которому осуществлялось автосопровождение перед переходом в инерционный режим. Перемещение ОЭП 1 продолжает осуществляться по прогнозируемым координатам. Программа перемещения строба формируется таким образом, что сначала он находится в зоне "замороженных" координат БФКР 5. Затем строб начинает перемещаться предпочтительно по спиралевидному закону, хотя может быть организовано и возвратно-поступательное перемещение вдоль направлений строчной и кадровой разверток. Как только блок определения координат в стробе 2 находит изображение, дающее достаточно высокую оценку функционалу сравнения с эталоном, БОКСт выдает соответствующий признак в формирователь логики инерционного режима 9, и тот снимает признак инерционного сопровождения с БОКСт и УПК и подключает с помощью второго коммутатора 6 выход блока формирования координат в растре 5 к первому входу устройства наведения и стабилизации 7, отключив предварительно от второго входа УНС выход устройства прогнозирования координат. По снятию признака инерционного сопровождения БОКСт 2 выдает команду на третий вход первого коммутатора 4, по которой третий выход БОКСт по координате объекта в стробе подключается ко входу БФКР 5 вместо выхода БЗПП. Таким образом восстанавливается контур автосопровождения ОЭСС. УПК 10 при этом переходит в режим расчета параметров траектории.
Как видно из изложенного, повышение точности сопровождения в предлагаемой системе достигается за счет расчета прогнозируемых координат и их сравнения с текущими в процессе инерционного сопровождения. Увеличение времени допустимого нахождения в режиме инерционного сопровождения достигается как в результате повышения точности сопровождения, так и за счет расширения зоны поиска объекта для восстановления автосопровождения за счет введения поискового перемещения строба. Уменьшение вероятности срыва сопровождения достигается помимо повышения точности сопровождения и расширения зоны, где оно может быть восстановлено, тем, что для восстановления автозахвата используется образ реального объекта, за которым шло слежение перед переходом в инерционный режим. Снижение вероятности ложного захвата объекта обеспечивается как тем, что используется образ реального объекта, так и тем, что возможность автоматического восстановления сопровождения блокируется до тех пор, пока не будут созданы минимально допустимые условия для его осуществления.
Источники информации
1. Барсуков Ф. И. , Величкин А.И., Сухарев А.Д. "Телевизионные системы летательных аппаратов", М. , "Советское радио", 1979, стр. 232, рис.7.17, аналог.
2. Максимов М. В., Горгонов Г.И. "Радиоэлектронные системы самонаведения", М., "Радио и связь", 1982, стр. 110-112, 228-230, аналог.
3. Авторское свидетельсьво СССР 1107340, 1983 г., МКИ Н 04 N 7/18, прототип.
4. Ривкин С.С. "Стабилизация измерительных устройств на качающемся основании", М., "Наука", 1978.
5. Тетельбаум И. И. , Шнейдер Ю.Р. "400 схем для АВМ", М., "Энергия", 1978.
6. Бесекерский В.А., Попов Е.П. "Теория систем автоматического регулирования", М., "Наука", 1973.
7. "Справочник по интегральным микросхемам", М., "Энергия", 1981.
8. Васенков А.А. "Микропроцессорные БИС и микро-ЭВМ", М., "Советское радио", 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
Изобретение относится к области оптико-электронных систем управления, предназначенных преимущественно для автоматического сопровождения подвижных объектов с перемещающегося основания. Задачей и достигаемым техническим результатом настоящего изобретения являются повышение точности сопровождения объекта при перерыве оптической связи и в условиях возмущений, вызванных работой комплекса, увеличение допустимого времени нахождения в инерционном режиме, снижение вероятности срыва сопровождения объекта, снижение вероятности ложного захвата объекта. Оптико-электронная система сопровождения содержит последовательно соединенные устройство наведения и стабилизации, оптико-электронный прибор и блок определения координат в стробе, последовательно соединенные датчик возмущения, формирователь логики инерционного сопровождения и устройство прогнозирования координат, а также последовательно соединенные блок задания программного перемещения, первый коммутатор, блок формирования координат в растре и второй коммутатор, при этом первый, второй, третий, четвертый и пятый выходы блока определения координат в стробе соединены соответственно с первым и вторым входами блока задания программного перемещения, вторым и третьим входами первого коммутатора и вторым входом формирователя логики инерционного сопровождения, третий вход которого является входом внешнего управления, а второй и третий выходы соединены соответственно со вторым входом блока определения координат в стробе и вторым входом второго коммутатора, выход блока формирования координат в растре соединен с третьим входом блока определения координат в стробе и вторым входом устройства прогнозирования координат, третий вход которого соединен со вторым выходом устройства наведения и стабилизации, а выход - с третьим входом второго коммутатора, чьи первый и второй выходы соединены с первым и вторым входами устройства наведения и стабилизации. 1 ил.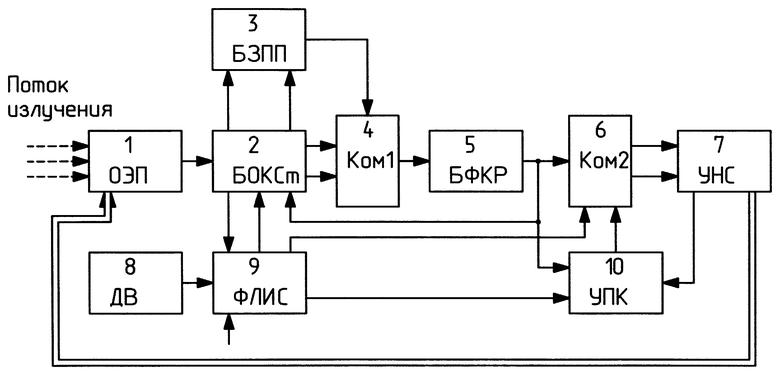
Оптико-электронная система сопровождения, состоящая из последовательно соединенных устройства наведения и стабилизации, оптико-электронного прибора и блока определения координат в стробе, отличающаяся тем, что в ее состав введены последовательно соединенные датчик возмущения, формирователь логики инерционного сопровождения и устройство прогнозирования координат, а также последовательно соединенные блок задания программного перемещения, первый коммутатор, блок формирования координат в растре и второй коммутатор, при этом первый, второй, третий, четвертый и пятый выходы блока определения координат в стробе соединены соответственно с первым и вторым входами блока задания программного перемещения, вторым и третьим входами первого коммутатора и вторым входом формирователя логики инерционного сопровождения, третий вход которого является входом внешнего управления, а второй и третий выходы соединены соответственно со вторым входом блока определения координат в стробе и вторым входом второго коммутатора, выход блока формирования координат в растре соединен с третьим входом блока определения координат в стробе и вторым входом устройства прогнозирования координат, третий вход которого соединен со вторым выходом устройства наведения и стабилизации, а выход - с третьим входом второго коммутатора, чьи первый и второй выходы соединены с первым и вторым входами устройства наведения и стабилизации.
| Телевизионное устройство измерения координат и скорости | 1983 |
|
SU1107340A1 |
| Способ измерения кратковременных изменений электрических величин | 1958 |
|
SU122543A1 |
| US 4739401, 19.04.1988 | |||
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 1984 |
|
RU2140721C1 |

