I
Изобретение относится к области автоматики.
Известны регуляторы давления 1, которые воспринимая подщзужиненным йоршневым Мементом импульс от регулируемой среды, преобразуют его в команду последующим звеньям системы регулирования.
Недостатком таких регуляторов повышенная нечувствительность из-за трения поршня о цилиндр и протечки через зазор регулируемой среды.
Известны также регуляторы давления мембранного типа 2, в которых импульс от регулируемой среды передается на мембрану (сильфон) и уравновешивается пружиной. Передача импульса выполняется с помощью следяЩ1е О поршня. В этой конструкции в импульсной части полностью исключено трение и нет йеретока регулируемой среды через неплотносш, но давление жидкости из сопла следящего элемента передается на мембрану регулятора давления. Поэтому при изменении давления рабочей жидкости изменяется положение передающего элёMcifra в мембране. Чтобы уменьшить влияние
этого давления, сопло следящего, поршня выбирают малым и тем уме1П.1лают быстродействие следящего поршня. Это, в свою очередь, приводит к необходимости увеличения числа усиливающих элементов.
Наиболее близким по технической сущности к данному изобретению является регулятор давления, содержащий корпус с установленным в нем чувстй ителбМ№Жетйайтом,1(Ш :Ййеннь1М в виде подпружиненного блока двух мембран, разделяющих корттус на полости подвода и отвода регулирудгмой среды и полость управляющей среды 3.
Такой регулятор не обеспечивает требуемого быстродействия и точности.
Целью изобретения является повыщение быстродействия и точности регулятора давления.
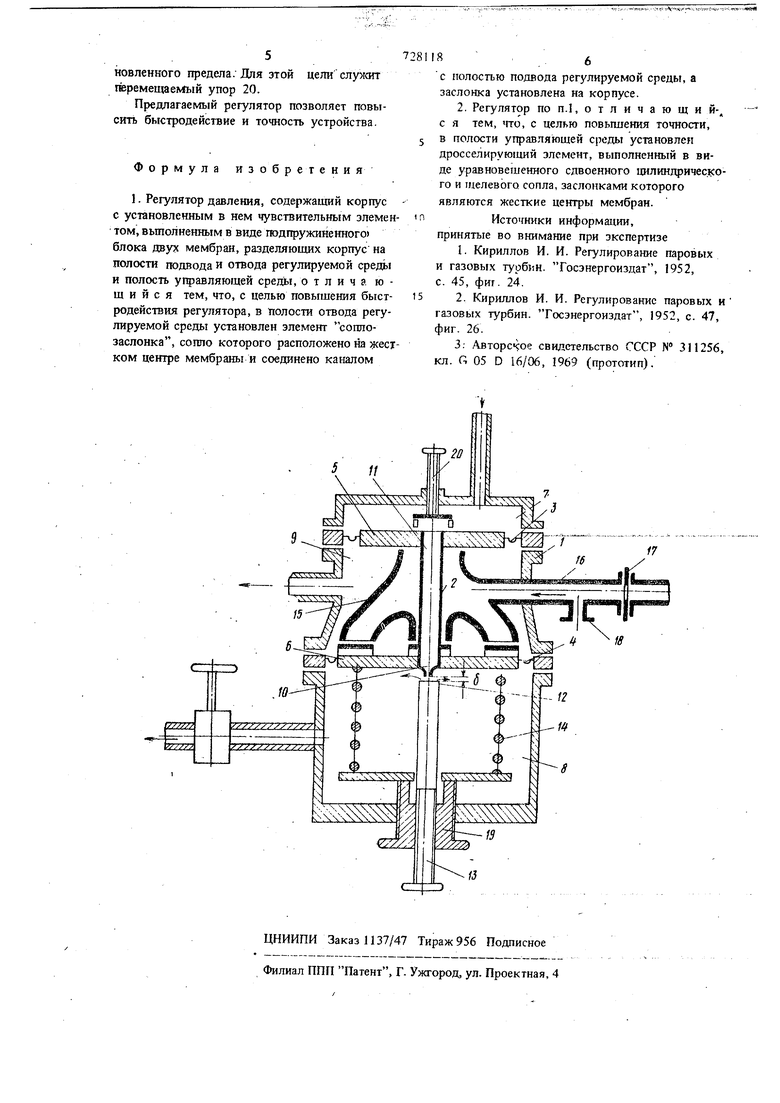
Цель достигается тем, что в регуляторе давления в полости регулируемой среды установлей элемент сопло-заслонка, сопло которого расположено на Жестком Центре Мембраны и соединено каналом с полостью подвода регулируемой среды, а заслонка установлена на корпусе, а также тем, что в полости управляющей 37 среды установлен дросселирующий элемент, выполненный в виде уравновешенного сдвоенного цилиндрического и щелевого сопла, заслонками которого яв;1Я1отся жесткие центры мембран. Регулятор давления представлен на чертеже. Регулятор содержит корпус 1, в котором расположен ч вствительный элемент 2. состоящий из блока двух мембран 3 и 4 с жесткими центра ми 5 и 6. Мембраны разделяют корпус на полости подвода 7 и отвода 8 регулируемой среды и полость 9 управляющей среды. В полости 8 установлен элемент сопло-заслонка, сопло 10 кото рого расположено на .жестком центре 6 мембраны 4 и соединено каналом 11 с полостью 7, а заслонка 12 установлена на винте 13 в корпусе I. Блок двух мембран связан с пружинрй 14. В пьлости 9 установлен дросселирующий элемент 15, выполненный в виде сдвоенного цилиндрического и щелевого сопла, заслонками которого являются жесткие центры мембран 5 и 6 и кото рое соединено с входным патрубком 16, в котором установлены диафрагма 17 и штуцер -18. Пружина 14 регулируется механизмом 19, выгюлненным в виде винта. Для ограничения регулятора установлен упор 20. Работа регулятора осуществляется следующим образом. Давление регулируемой среды подаодится в полость 7. Это давление воздействует на мембрану 3 с жестким центром 5, жестко соединенную с мембраной 4 с жестким центром 6, опирающимся на пружину 14. Давление управляющей среды ибдводится чере.з диафрагму 17 к дросселирующему элементу 15, имеющему два выходных отверстия: одно (верхнее) - круглое, второе (нижнее) - кольцевое. Слив из верхнего отверстия регулируется жестким центром 5, а из .нижнего - жестким центром 6. Площади верхнего - круглого и нижнего - кольцевого отверстий выбираются с таким расчетом, чтобы усилия управляющей среда, воздействующие как на жесткий центр 5, так и на жесткий центр 6, были одинаковыми. Этим исключается влияние управляющей среды на работу регулятора. Периметр отверстия, через KOTolpoe сливается среда вверху, в несколько раз меньще периметра отверстия, через которое сливается среда внизу. Поэтому, при изменении давления регулируемой среды в камере 7 и соответствующем перемещении мембран 3 и 4 , велишна сливного сечешя изменится значительно. увеличении давления управляющей среды суммарное сливное сеЧение увеличится, а щ уменьшении - уменьшится. В первом случае дав НбКйе в дфосселйрующем элементе 15 уменьшится, во втором - увеличится. Изменение этого давления будет передаваться через штуцер 18 последующим звеньям системы регулирования. Из полости 9 управляющая среда сливается в т остранство с атмосферным или другим, но знаштельно меньшим давлением, чем наимейьщее давление в дросселирующем элементе 15. При этом изменение давления в полости 9 не будет влиять на величину импульсного дав-ления, передаваемого на пружину 14, поскольку активные площади мембран 3 и 4 одинаковы. В полость 8 регулируемая среда подводится по каналу 1Г через дроссель на выходе, а из полости 8 вытекает через дроссель , управляемый с помощью привода. На жестко связанные мембраны 3 и 4 дейcfsyeT разность давлений в полостях 7 и 8. При этом в полости 8 устанавливается относительно малое давление, не превышающее трех расчетных неравномерностей давления управляющей среды. Разность усилий на мембраны 3 и 4 уравновешивается пружиной 14. .Вытекание регулируемой среды через канал И перекрывается заслонкой 12, установленной на винте. 13. Зазор между заслонкой 12 и соплом 10 устанавливается исходя из следз ющего. При нормальных условиях эксплуатации и нормальном давлении регулируемой средь в полости 7 зазор S выбирается таким, чтобы при относительно малых перемещениях мембран 3 и 4 количество регулируемой среды, поступающей в полость 8, прйктйчески оставалось постоянным. При аварийном повышении давления в полости 7 зазор {5 уметшается настолько, что уменьшается пропуск регулируемой среды в полость 8. Это вызьгеает уменьшение давления в этой полости и, как следствие, большее перемещение мембран 3 и 4. Соответственно давление в дросселирующем элементе 15 уменьшится больше, чем это соот4ветстврвалр- бы статическому изменению давления в полостях 7 и 8. В давдом случае появляется включающая связь и при относительно большом уменьшении зазора S мембраны 3 и 4 переместятся до упора и сразу откроют максимальный слив среды дросселирующего элемента 15. Это вызовет появление максимальной команды последующим звеньям регулирования. Ручное или дистанционное изменение давления регулируемой среды осуществляется с помощью механизма 19, воздействующего на натяжение пружины 14. Изменяя натяжение пружины 14, можно изменять сливное сечение из дросселирующего элемента 15 при неизменном давлении в полости 7 и тем воздействовать на агрегат для изменения давления регулируемой среды в желаемом направлении. По техниюским условиям иногда требуется ограничивать действие регулятора 1фи уменьшении давления регутшруемой среды сверх уста
| название | год | авторы | номер документа |
|---|---|---|---|
| Дросселирующий гидрораспределитель | 1988 |
|
SU1576742A1 |
| Регулятор давления газа непрямого действия | 1981 |
|
SU954964A1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ПАРОВОЙ ТУРБИНЫ | 1996 |
|
RU2117771C1 |
| Пневмогидравлический усилитель | 1985 |
|
SU1265405A1 |
| Пневмогидравлический усилитель | 1985 |
|
SU1276858A1 |
| Устройство для вспрыска топлива в двигатель внутреннего сгорания | 1974 |
|
SU602127A4 |
| Регулятор давления | 1986 |
|
SU1405032A1 |
| Гидравлический вибросуппорт Л.В.Карсавина | 1988 |
|
SU1650377A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2001 |
|
RU2211475C2 |
| Регулятор давления газа | 1990 |
|
SU1716493A1 |
