где iA),Wit-TeKymafl, развертываемая по программе частота синусоидального сигнала
0 - собственная частота вибрирующей системы;
Р - уровень сигнала с частотой ttJ j; К - эмпирический коэффициент (К
-0,1);
уровень дополнительного сигнала.
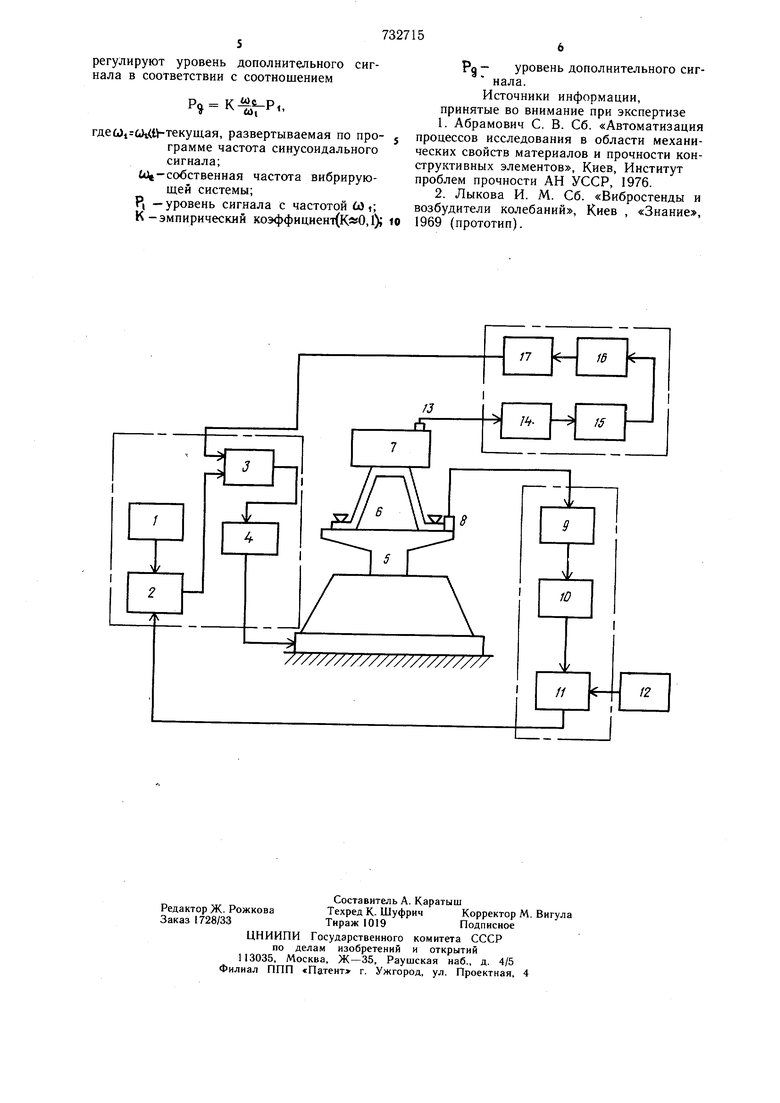
На чертеже представлена блок-схема устройства, реализующего способ.
Устройство содержит генератор 1, который подключен к входу регулятора 2, подключенному к входу блока 3 суммирования, усилитель 4, возбудитель 5 колебаний, приспособление б для крепления испытуемого изделия 7, вибропреобразователь 8, установленный на приспособлении 6, усилитель 9, выделитель 10 первой гармоники, блок 11 сравнения, программный- задатчик 12. Элементы схемы с 1 по 12 входят в контур управления первой гармоникой. Вибропреобразователь 13, установленный на испытуемом изделии 7, усилитель 14, выделитель 15 кратной гармоники, фазовращатель 16, регулятор 17 и блок 3 суммирования образуют контур управления выделенной кратной гармоники.
Способ реализуют следующим образом. Контур управления первой гармоникой, которая является основным синусоидальным сигналом, работает следующ,им образом.
Сигнал вибропреобразователя 8, усиленный усилителем 9, поступает на вход выделителя 10 первой гармоники, сравнивается с программным в блоке 11 сравнения и поступает на вход регулятора 2, который регулируя уровень сигнала генератора 1, осуществляет управление в соответствии с программой. Но из-з-а билинейной характеристики приспособления б для крепления изделий 7 и нелинейности характеристики возбудителя 5 колебаний сигналы, снимаемые с вибропреобразователей 8 и 13, содержат кратные составляющие синусоидального сигнала. Кратные гармоники по уровню могут превосходить уровень основного сигнала и искажают заданный уровень вибрации.
Для повыщения точности виброиспытаний введен дополнительный контур, который формирует корректирующий сигнал определенной фазь1, частоты и уровня. Подавление кратных гармоник, согласно изобретению, происходит за счет нелинейного взаимодействия кратных гармоник с корректирующим сигналом, который получается выделением какой-либо кратной гармоники из спектра вибрации. Сигнал вибропреобразователя 13, усиленный усилителем 14, поступает на выделитель 15 кратной гармоники, который формирует частоту сигнала. Фаза корректирующего сигнала устанавливается экспериментально, путем минимизации сигнала на выходе выделителя 15. Эту
минимизацию осуществляют фазовращателем 16. Требуемая фаза (tpj) определяется соотнощением:
Г - .
-pagf
где К), К а - жесткость участков характеристики силы упругости приспособления для крепления изделия при его растяжении и сжатии соответственно.
Регулятор 17 устанавливает уровень корректирующего сигнала в соответствии с выражением:
Р
где oji - текущая, развертываемая по программе частота синусоидального сигнала;
We - собственная частота вибрирующей системы;
Pi - уровень сигнала с частотой СО i; К - эмпирический коэффициент(Кя О, I); PJ- уровень дополнительного сигнала. Сформнрованный по частоте, фазе и уровню сигнал коррекции псхггупает на вход возбудителя 5 колебаний. При этом система колеблется как линейная. Процесс коррекции можно рассматривать как принудительную линеаризацию характеристики системы.
Установлено, что настройка контура коррекции на одной какой-либо кратной гармонике обеспечивает подавление остальных кратных гармоник. После того как произведено подавление кратных гармоник, генератор 1 переходит на режим сканирования частоты (t) (i}.
Формула изобретения
Способ испытаний изделий на синусоидальную вибрацию, по которому осуществляют развертку подаваемого на вход возбудителя колебаний синусоидального сигнала возбуждения, выделяют первую гармонику сигнала вибропреобразователя, установленного на испытуемом изделии или на подвижной части возбудителя колебаний, и, используя ее в качестве сигнала обратной связи, осуществляют регулирование уровня сигнала возбуждения, отличающийся тем
что, с целью повыщения точности испытаний путем подавления кратных гармоник, на вход возбудителя колебаний одновременно с сигналом возбуждения подают дополнительный сигнал, который получают выделением одной из кратных гармоник из сигнала вибропреобразователя, установленного на изделии, при этом изменяют фазу выделенного сигнала, добиваясь минимизации выделенной кратной гармоники, после чего
регулируют уровень дополнительного сигнала в соответствии с соотношением
W,
(tbтекущая, развертываемая по про- j грамме частота синусоидального сигнала;
tOj-собственная частота вибрирующей системы;
Р| -уровень сигнала с частотой 60 t; К-эмпирический коэффициент К ОД); fo
PQ- уровень дополнительного сигнала.
Источники информации, принятые во внимание при экспертизе
1.Абрамович С. В. Сб. «Автоматизация процессов исследования в области механических свойств материалов и прочности конструктивных элементов, Киев, Институт проблем прочности АН УССР, 1976.
2.Лыкова И. М. Сб. «Вибростенды и возбудители колебаний, Киев , «Знание, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРОСТЕНД | 2014 |
|
RU2572070C1 |
| Устройство для резонансных испыта-Ний ОбРАзцОВ МАТЕРиАлОВ и издЕлий | 1974 |
|
SU807131A1 |
| Устройство для виброиспытаний изделий | 1982 |
|
SU1216695A1 |
| Устройство для возбуждения автоко-лЕбАНий | 1979 |
|
SU814477A1 |
| Автоколебательный вибростенд для программных испытаний | 1977 |
|
SU900144A1 |
| Электрогидравлический вибростенд | 1978 |
|
SU796685A1 |
| Устройство для регулирования виброколебаний | 1982 |
|
SU1089556A1 |
| Электродинамический вибростенд | 1982 |
|
SU1144016A1 |
| Многоканальное устройство для вибрационных испытаний конструкции | 1989 |
|
SU1682847A1 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
