Изобретение относится к нелинейным системам автоматического управ ления и может быть использовано в системах автоматического управления летательных аппаратов, приводы которых имеют скоростную характерис тику с ограничением. Известен привод, содержащий интегратор, модулятор, образующие замкнутый контур, усилитель, силово механизм и элемент обратной связи Интегратор, включенный в контур привода и охваченный обратной связь не обеспечивает эффективного уменьшения влияния высокочастотных помех на динамику привода. Наиболее близким по технической сущности к предлагаемому является помехозащищенный привод, содержащий интегратор, выход которого через первый усилитель связан с силовым механизмом, элемент обратной связи вход которого подключен к ВЫХО.ЦУ силового механизма 2. Введение дополнительного интегра тора в контур привода повышает статическую точность его работы и уве личивает чувствительность, но приводит к трудностям обеспечения устойчивости поскольку фазовая характеристика разомкнутого привода, обладающего астатизмом второго порядка в области низких частот, начинается со значения - 180 , а наличие в приводе инерционных элементов еще более увеличивает фазовое отстаивание в области средних и высоких частот. Целью изобретения является улучшение динамических характеристик привода при одновременном сохранении помехоустойчивости. Предлагаемый привод отличается от известного тем, что он дополнительно содержит выпрямительные элементы, например диоды, первый и второй сумматсфы и второй усилитель, при этом анод первого и катод второго диодов подключены к входу привода, входы первого сумматора подсоединены к катоду первого и аноду третьего диодов, а выход - к катоду пятого диода и входу интегратора, входы второго сумматора связаны с анодом второго и катодом четвертого диодов, а выход - с входом интегратора и анодом шестого диода, вход второго усилителя подключен к аноду пятого и катоду шестого диодов, а выход - к входу первого усилителя, выход
элемента обратной свяаи соединен с в :одом первого усилителя, анодом четвертого и катодом третьего диодов.
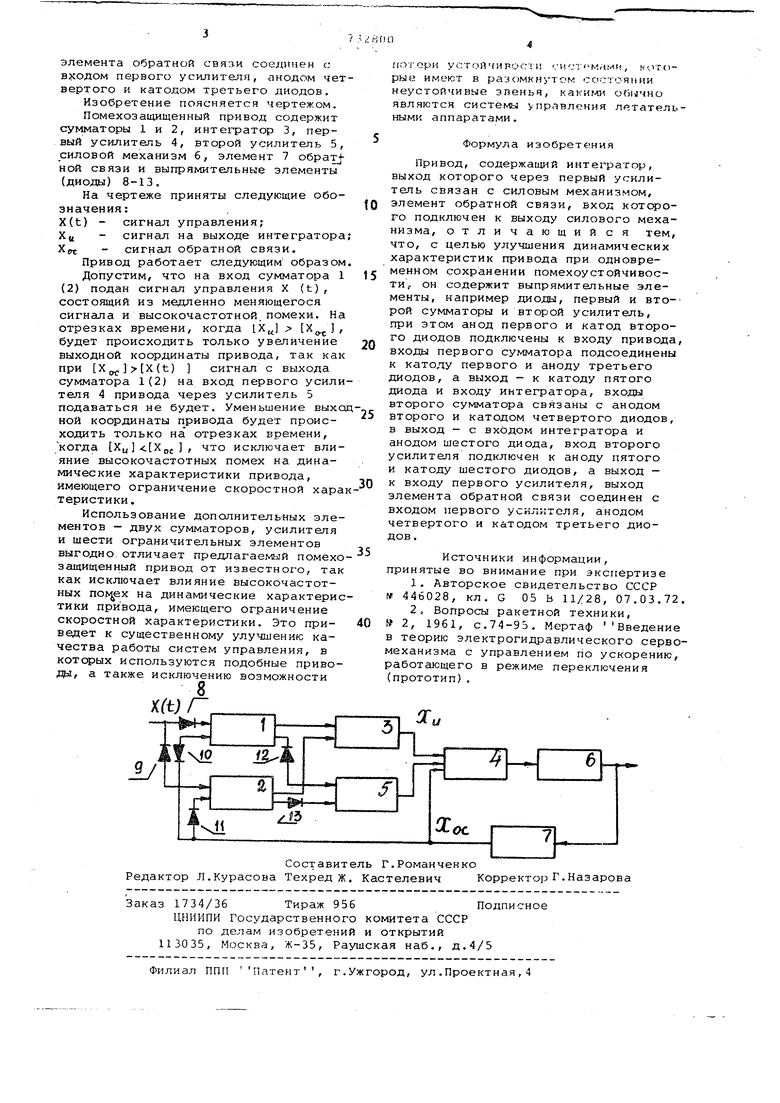
Изобретение поясняется чертежом.
Помехозащищенный привод содержит сумматоры 1 и 2, интехтэатор 3, первый усилитель 4, второй усилитель 5, силовой механизм б, элемент 7 o6paTjной связи и выпрямительные элементы (диоды) 8-13,
На чертеже приняты следующие обозначения:
X(t) - сигнал управления Хц - сигнал на выходе интегратора Xot - сигнал обратной связи.
Привод работает следующим образом
Допустим, что на вход сумматора 1 (2) подан сигнал управления X (t), состоящий из медленно меняющегося сигнала и высокочастотной, помехи. На отрезках времени, когда 1Х( о будет происходить только увеличение выходной координаты привода, так как при X(X(t) сигнал с выхода сумматора 1(2) на вход первого усилителя 4 привода через усилитель 5 подаваться не будет. Уменьшение выхоной координаты привода будет происходить только на отрезках времени, ;когда , что исключает влияние высокочастотных помех на динамические характеристики привода, имеющего ограничение скоростной харатеристики .
Использование дополнительных элементов - двух сумматоров, усилителя и шести ограничительных элементов выгодно.отличает предлагаемый помехозащищенный привод от известного, так как исключает влияние высокочастотных на динамические характеристики привода, имеющего ограничение скоростной характеристики. Это приведет к существенному улучшению качества работы систем управления, в которых используются подобные приводы, а также исключению возможности
8
гготори устойчивое и f.-ncT--MrtMH, mvroрые имеют в разомкнутом состоянии неустойчивые зпеньч, какими обычно являются системы упрлвл€ ния летательными аппаратами.
Формула изобретения
Привод, содержащий интегратор, выход которого через первый усилитель связан с силовым механизмом, элемент обратной связи, вход которого подключен к выходу силового механизма, отличающийся тем, что, с целью улучшения динамических характеристик привода при одновременном сохранении помехоустойчивости, он содержит выпрямительные элементы, например диоды, первый и второй сумматоры и второй усилитель, при этом анод первого и катод второго диодов подключены к входу привода входы первого сумматора подсоединены к катоду первого и аноду третьего диодов, а выход - к катоду пятого диода и входу интегратора, входы второго сумматора связаны с анодом второго и катодом четвертого диодов, в выход - с входом интегратора и анодом шестого диода, вход второго усилителя подключен к аноду пятого и катоду шестого диодов, а выход - к входу первого усилителя, выход элемента обратной связи соединен с входом первого усилятеля, анодом четвертого и катодом третьего диодов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 446028, кл. G 05 Ь 11/28, 07.03.7
2,Вопросы ракетной техники,
2, 1961, с.74-95. Мертаф Введени в теорию электрогидравлического сервмеханизма с управлением по ускорению работающего в режиме переключения (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный привод | 1975 |
|
SU591810A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| Генератор синусоидальных колебаний | 1989 |
|
SU1786634A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2020717C1 |
| Устройство для моделирования тиристора | 1983 |
|
SU1091190A1 |
| Стабилизированный источник напряжения постоянного тока | 1991 |
|
SU1797730A3 |
| Устройство для моделирования газотурбинного двигателя | 1983 |
|
SU1121683A1 |
| СИСТЕМА ЗАЖИГАНИЯ С НАКОПЛЕНИЕМ ЭНЕРГИИ НА КОНДЕНСАТОРЕ | 1992 |
|
RU2020259C1 |
| ЗАЩИТНАЯ ПАНЕЛЬ | 2003 |
|
RU2244974C1 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 1991 |
|
RU2024171C1 |
