i
Изобретение относится к области систем автоматического управления (;АУ) и может быть использовано в системах управления летательных аппаратов, содержащих приводы с ограничением и подверженных воздействию помех.
Известно нелинейное корректирующее устройство ДЛЯ динамических систем с ограничением 12, содержащее блок с органичением, сумматор, блок с зоной нечувствительности, интегратор, пороговый элемент, соединенный со входом блока с ограничением, и ключ, управляющий вход которого подключен к выходу блока с зоной нечувствительности, второй вход - к выходу ключа, а выход интегратора через ключ сое- динен со входом сумматора.
Недостаток известного устройства заключается в том,что сформированный дополните.льный компенсирующий сигнал, суммируясь с управляющим сигналом, вызывает появление фазового запаздывания в САУ, что может ухудшить ее динамические свойства и привести к потере устойчивости при управлении структурно-неустойчивым объектом регу.пирования, например летательным аппаратом с двигателем на твердом топливе.
Наиболее близким по технической суности к изобретению являетя нелинейны привод 2,содержащий сумматор с огранчением, выход которого связан со входом исполнительного механизма, первый и второй интеграторы, первый и второй выпрямительнЕл-б элементы, например диоды. Выходы интеграторов и вход нелинейного привода подключены ко входам сумматора с ограничением. Вход нелинейного привода подсоединен к аноду первого и катоду второго диодов. Катод первого диода связан со входом первого интегратора, а анод второго диода - со входом второго интегратора
Однако в таком приводе при ограничении амплитуды гармонического управляющего сигнала более 63% нет компенсирующего положительного фазового сдвига.
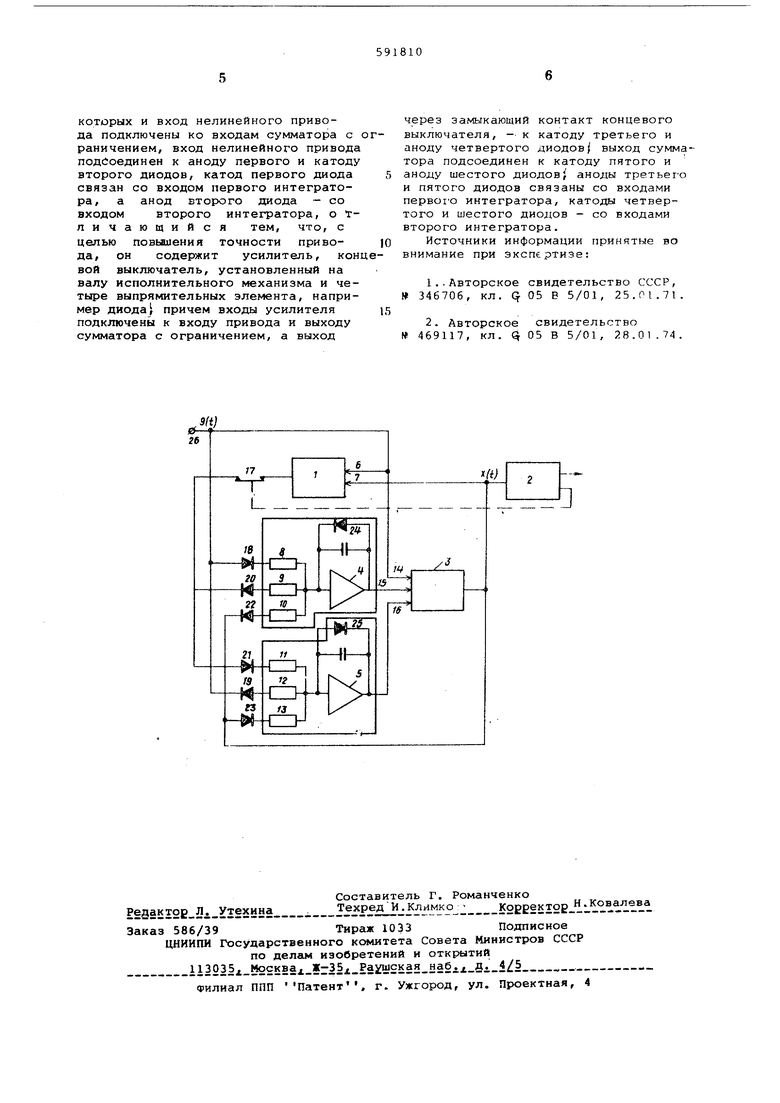
Предлагаемый нелинейный привод допол нительно содержит усилитель, концевой выключатель установленный на валу исполнительного механизма, и четыре выпрямительных элемента, например диода. Входы усилителя подклю-чены к входу -йривода и выходу сумматора с ограничением, а выход чграа замыкающий контакт концевого выключателя - к катоду третьего и аноду четвертого диодов. Выход сумматора подсоединен к катоду пятого и аноду шестого диодов. Диоды третьего и пятого диодов связаны со входами первого интегратора, катоды четвертого и шестого диодов - со входами второго интегратора. . Это позволяет повысить точность компенсации- влияния ограничения на динамические свойства условно-устойчивых САУ. Функциональная схема нелинейного привода представлена на чертеже/ где обозначены усилитель 1, исполнительный механизм 2, имеющий органичение угла поворота (хода штока), сумматор 3 с ограничением, первый 4 и второй 5 интеграторы, входы 6 и 7 усилителя 1, входы первого интегратора 8-10, входы второго интегратора 11-13, вкоды 14-16 сумматора 3, замыкающий контакт концевого выключателя 17, диоды 18-25 и вход 26 нелинейного привода. Диоды 24 н 25 включены в цепи обратной связи интеграторов таким обра зом, что первый интегратор интегрирует только сигнал положительной полярности, второй интегратор - только сигнал отрицательной полярности. Нелинейный привод работает следую щим образом. При отсутствии ограничения выходной сигнал X (i. ) сумматора 3 равен его входному сигналу (i ), при это сигнал на выходе усилителя 1 равен нулю, так как сигналы на его входах и 7 равны между собой и противополож ны по знаку. Равны нулю и выходные сигнсшы интеграторов 4 и 5, так как сигналы на их входах 8, 10 и 12, 13 соответственно тоже равны между собо и противоположны по знаку, а сигналы на входы 9 и 11 интеграторов 4 и 5 при зтом не поступают, хотя згишкающие контакты 17 кольцевого выключате ля замкнуты, так как выходной сигнал усилителя 1 равен, нулк. Таким образом :при; отсутствии ограничения вал исполйительнсЯо меха низма 2 привода поворачивается в соо ветствие с сигналом X {t ). Компенси ющий сигнал с выходов интеграторов 4 или 5 на вход исполнительного механизма 2 через сумматор 3 не поступае Компенсация влияния ограничения отсутствует. Как только управлякхоий сигнёш (i ) превысит уровень ограничения, контакты 17 размыкгиотся. Выходной сигнал сумматора 3 уже не равен сигналу на его выходе 14. Интегратор 4 (или 5 в зависимости от полярности сигнала g (t ) интегрирует при этом разностный сигнет б (t ) - огрПроинтегрированный разностный сигнаш вычитается из управляющего сигнала g (i ) на-входе сумматора 3. В результате привод выходит из зоны ограничения раньше, чем управляющий сигнал (t ) Это создает фазовое опережение при работе привода, достаточное для улучшения динамических свойств САУ, летательных аппаратов, в .которых включен предлагаемый нелинейный привод. Таким образом за счет получаемой фазовой коррекции компенсируется отрицательное влияние ограничителя привода на динамические свойства САУ. При выходе привода из зоны ограничения его контакты 17 замыкаются. С выхода усилителя 1 поступает разностный сигнал (t ) - X (i ) на вход 9 (или 11 в зависимости от полярности разностного сигнала) интегратора 4 или 5 соответственно. Одновременно на другие входы 8 и 10 интегратора 4 (или 12 и 13 интегратора 5) поступают сигналы (i ) и X (t ) противоположные между собой по знаку. Однако разностный сигнал, снимаемый со входов 8 и 10 (или 12 и 13), меньше по амплитуде, чем сигнал на входе 9 (или 11) |П{теграторов 4 или 5 из-за того, что козффициент передачи усилителя 1 больше единицы. Коэффициент передачи сумматора 3 равен единице. Коэффициенты передачи интеграторов 4 (или 5) по любому входу 8-10 (или 11-13) равны между собой, поэтому интегратор 4 (или 5) при выходе привода из зоны ограничения разряжается выходным сигналом усилителя 1. Как только входной g (t ) и выходной X (i ) сигналы сумматора 3 станут равны между собой, разряд интегратора 4 (5) завершается и привод работает в линейном режиме без органичения (без компенсирующего сигнала). При этом зо аб Г а«иче11Ия привода пропорциональна зоне насы1аёния сумматора 3. Техйико-эконрмическйй эффект изобретеиия состоит в том, что за счет эффективного испрдьзрвасшя элементов су1яествуквцих npHi&qjiOf с ограничением (концевых контактов) и дополнительных элементов в предложенном нелинейном приводе устраняется отрицательный эффект насьицения выходной координаты привода и тем самым улучшаются динамические свойства условно-устойчивых САУ. Формула изобретения Нелинейный привод, содержащий сумматор с ограничением, выход которого связан со входом исполнительного механизма, первый и второй выпрямительные , например диоды, первый и второй интеграторы, выходы
которых и вход нелинейного привода подключены ко входам сумматора с раничением, вход нелинейного привода подсоединен к аноду первого и катоду второго диодов, катод первого диода связан со входом первого интегратора, а анод вторю го диода - со входом второго интегратора, о тличающийся тем, что, с целью повышения точности привода, он содержит усилитель, конвой выключатель, установленный на валу исполнительного механизма и четыре выпрямительных элемента, например диода) причем входы усилителя подключены к входу привода и выходу сумматора с ограничением, а выход
через заг/ыкающий контакт концевого выключателя, - к катоду третьего и аноду четвертого диодов| выход сумматора подсоединен к катоду пятого и аноду шестого диодов аноды третьего и пятого диодов связаны со входами nepBOiO интегратора, катоды четвертого и шестого диодов - со входами второго интегратора.
Источники информации принятые во внимание при экспертизе:
1..Авторское свидетельство СССР, 346706, кл. Q 05 В 5/01, 25.01.71.
2. Авторское свидетельство № 469117, кл. Q 05 В 5/01, 28.01.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсацииОгРАНичЕНия | 1974 |
|
SU809043A1 |
| Нелинейное корректирующее устройство для динамических систем с ограничением | 1975 |
|
SU603949A1 |
| Нуль-орган | 1980 |
|
SU934444A1 |
| ИМИТАТОР ВЫХОДНЫХ СИГНАЛОВ ТЕНЗОРЕЗИСТОРОВ | 2013 |
|
RU2536676C1 |
| Привод | 1974 |
|
SU732800A1 |
| Астатическая система регулирования | 1978 |
|
SU842708A1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| Устройство для моделирования упругого гистерезиса | 1980 |
|
SU966708A1 |
| Устройство для моделирования упругой характеристики привода в виде петли гистерезиса | 1980 |
|
SU942061A1 |
