(54) ПУЛЬСАТОР ДЛЯ ДОИЛЬНЫХ АППАРАТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУЛЬСАТОР ДОИЛЬНОГО АППАРАТА | 2024 |
|
RU2824211C1 |
| Устройство И.И.Гриневича для доения животных | 1990 |
|
SU1794418A1 |
| Доильный аппарат | 2015 |
|
RU2621015C1 |
| Доильный аппарат | 2022 |
|
RU2787790C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2001 |
|
RU2221417C2 |
| ДОИЛЬНЫЙ АППАРАТ | 2003 |
|
RU2247492C2 |
| Пульсоколлектор доильного аппарата | 1990 |
|
SU1787387A1 |
| ДОИЛЬНЫЙ АППАРАТ | 2010 |
|
RU2454068C2 |
| ДОИЛЬНЫЙ АППАРАТ | 1991 |
|
RU2032322C1 |
| ДОИЛЬНЫЙ АППАРАТ | 1999 |
|
RU2147174C1 |
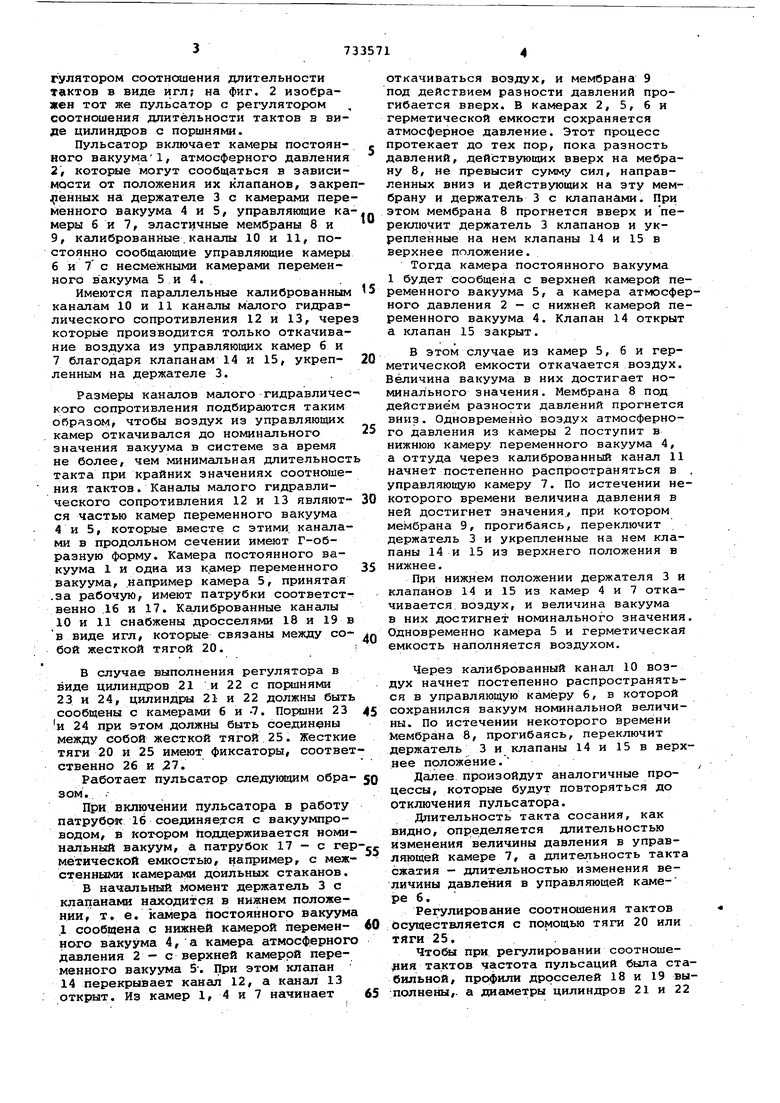
Изобретение относится к области сельского хозяйства, в частности, к пульсаторам для доильных аппаратов. Известен пульсатор для доильных аппаратов, включаю1дий корпус, кймеры постоянного вакуума и атмосферного давления с клапанами, закрепленными на держателе, переменного вакуума и управляющую кайеру, сообщенную с камерой переменного вакуума калиброван ным каналом 1, Известный пульсатор не обеспечивает оптимального режима доения животных. Известен также пневматический пуль сатор для доильных аппаратов, включаю щий корпус, камеры постоячного вакуума и атмосферного давления с клапана ми, закрепленными на держателе, две камеры переменного вакуума управляю щую камеру, сообщенную с одной, несмежно расположенной с ней камерой переменного вакуума калиброванным: каналом 2 . Этот пульсатор тоже не обеопечива ет оптимального режима доения животных. Цель изобретения - обеспечение оп тимального режима доения животных nyтем регулирования соотношения длительности такта. Достигается это тем, что пульсаторснабжен дополнительной управляющей камерой с калиброванным- каналом, который сообщен с другой несмежной с ней камерой переменного вакуума и имеет регулятор соотношения длительности тактов, причем управляющие камеры выполнены в продольном сечении Г-обраэными и снабжены клапанами диаметрально противоположно закрепленными на держателе. Регулятор соотноиения длительности тактов выполнен в виде.; дросселирующих игл, установленных в калиброванных каналах с в о зможностью перемещения по их продоатьной оси, обращенных остриями во взаимно противоположных направлениях и связанных между собой жесткой тягой, снабженной фиксатором. Регулятор соотнощения длительности тактов может быть выполнен в виде сообщенных с управляющими камерами цилиндров с поршнями, последние из которых связаны между собой жесткой На фиг, 1 изображен схем&тично пульсатор для доильных аппаратов с
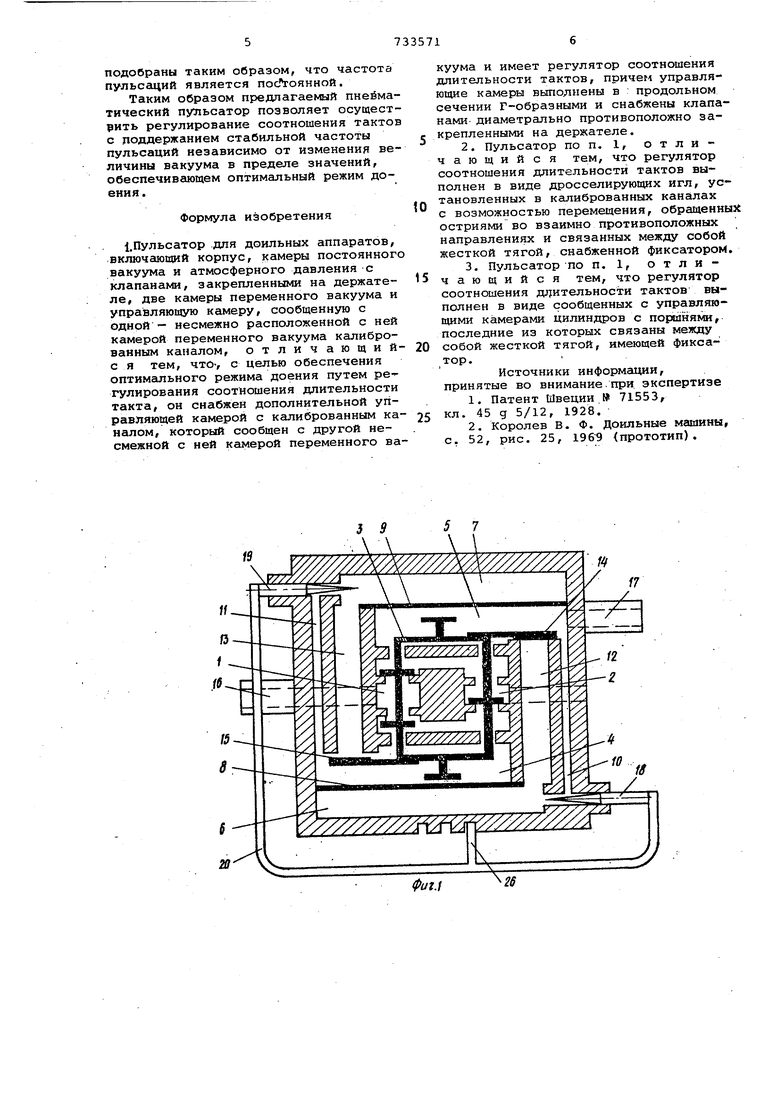
гулятором соотношения длительности тактов в виде игл; на фиг. 2 изображен тот же пульсатор с регулятором соотношения длительности тактов в виде цилиндров с поршнями.
Пульсатор включает камеры постояннего вакуума1, атмосферного давления 2, которые могут сообщаться в зависимости от положения их клапанов, закре енных на держателе 3 с камерами переменного вакуума 4 и 5, управляющие ка меры б и 7, эластичные мембраны 8 и 9, калиброванные.каналы 10 и 11, постоянно сообщающие управляющие камеры
6и 7 с несмежными камерами переменного вакуума 5 и 4.
Имеются параллельные калиброванным каналам 10 и 11 каналы малого гидравлического сопротивления 12 и 13, чере которые производится только откачивание воздуха из управляющих камер б и
7благодаря клапанам 14 и 15, укрепленным на держателе 3.
Размеры каналов малого гидравлического сопротивления подбираются таким образом чтобы воздух из управляющих камер откачивался до иоминального значения вакуума в системе за время не более, чем минимальная длительност такта при крайних значениях соотношения тактов. Каналы малого гидравлического сопротивления 12 и 13 являются частью камер переменного вакуума 4 и 5, которые вместе с этими, каналами в продольном сечении имеют Г-образную форму. Камера постоянного вакуума 1 и одна из к.амер переменного вакуума, например камера 5, принятая .за рабочую, имеют патрубки соответст- венно 16 и 17. Калиброванные каналы 10 и 11 снабжены дросселями 18 и 19 в в виде игл, которые связаны между собой жесткой тягой 20.
В случае выполнения регулятора в виде цилиндров 21 и 22 с порднями 23 и 24, цилиндри 21 и 22 должны быть сообщены с камерами 6 и -7. Поршни 23 и 24 при этом должны быть соединены между собой жесткой тягой 25. Жесткие тяги 20 и 25 имеют фиксаторы, соответственно 26 и 27.
Работает пульсатор следуничим образом. .
При включении пульсатора в работу патрубсж 16 соединяется с вакууМпроводом, в котором тоддерживается номинальный вакуум, а патрубок 17 - с гер метической емкостью, например, с межстенными камерами доильных стаканов.
В начальный момент держатель 3 с клапанами находится в нижнем положении, т. е. камера постоянного вакуума .1 сообщена с нижней камерой перемениого вакуума 4, а кгмера атмосферного дЕшления 2 - с верхней камерой переменного вакуума 5 При этом клапан 14 перекрывает канал 12, а канал 13 открыт. Из камер 1, 4 и 7 начинает
откачиваться воздух, и мембрана 9 под действием разности давлений прогибается вверх. В камерах 2, 5, б и герметической емкости сохраняется атмосферное давление. Этот процесс протекает до тех пор, пока разность давлений, действующих вверх на мебрану 8, не превысит сумму сил, направленных вниз и действующих на эту мембрану и держатель 3 с клапанами. При этом мембрана 8 прогнется вверх и переключит держатель 3 клапанов и укрепленные на нем клапаны 14 и 15 в верхнее положение.
Тогда камера постоянного вакуума 1 будет сообщена с верхней камерой переменного вакуума 5, а камера атмосфеного давления 2-е нижней камерой переменного вакуума 4. Клапан 14 открыт а клапан 15 закрыт.
В этом случае из камер 5, 6 и герметической емкости откачается воздух. Величина вакуума в них достигает номинального значения. Мембрана 8 под действием разности давлений прогнется вниз. Одновременно воздух атмосферного давления из камеры 2 поступит в нижнюю камеру переменного вакуума 4, а оттуда через калиброванный канал 11 начнет постепенно распространяться в управляющую камеру 7. По истечении некоторого времени величина давления в ней достигнет значения, при котором мембрана 9, прогибаясь, переключит держатель 3 и укрепленные на нем клапаны 14 и 15 из верхнего положения в нижнее.
При нижнем положении держателя 3 и клапанов 14 и 15 из камер 4 и 7 откачивается воздух, и величина вакуума в них достигнет номинального значения Одновременно камера 5 и герметическая емкость наполняется воздухом.
Через калиброванный канал 10 воздух начнет постепенно распространяться в управляющую камеру б, в которой сохранился вакуум номинальной величины. По истечении некоторого времени Мембрана 8, прогибаясь, переключит держатель 3 и клапаны 14 и 15 в верхнее прложёние.
Далее произойдут аналогичные процессы, которые будут повторяться до отключения пульсатора.
Длительность такта сосания, как видно, определяется длительностью изменения величины давления в управляющей камере 7, а длительность такта сжатия - длительностью изменения величины давления в управляющей камере 6.
Регулировгшие соотношения тактов осуществляется с помощью тяги 20 или тяги 25.
Чтойл при регулировании соотноше 1ия тактов частота пульсаций была стабильной, пррфили дросселей 18 и 19 вы:полнены,. а диаметры цилиндров 21 и 22
подобраны таким образом, что частота пульсаций является поЛоянной.
Таким образом предлагаемый пнейматический пульсатор позволяет осуществить регулирование соотношения тактов с поддержанием стабильной частоты пульсаций независимо от изменения величины вакуума в пределе значений, обеспечивающем оптимальный режим доения .
Формула изобретения
1,Пульсатор для доильных аппаратов, включающий корпус, камеры постоянного вакуума и атмосферного давления с клапанами, закрепленными на держателе, две камеры переменного вакуума и управляющую камеру, сообщенную с одной - несмежно расположенной с ней камерой переменного вакуума калиброванным каналом, отличающийс я тем, что-, с целью обеспечения оптимального режима доения путем регулирования соотношения длительности тактаf он снабжен дополнительной управляющей камерой с калиброванным каналом, который сообщен с другой несмежной с ней камерой переменного ва1в
куума и имеет регулятор соотношения длительности тактов, причем управляющие Кс1меры вьшолнены в продольном сечении Г-образными и снабжены клапанами диаметрально противоположно закрепленными на держателе.
0
с возможностью перемещения, обращенных остриями во взаимно противоположных направлениях и связанных между собой жесткой тягой, снабженной фиксатором.
0 собой жесткой тягой, имеющей фикса тор.
Источники информации, принятые во внимание.при. экспертизе
5
} 9
.
//ж //////)
17
фиг.
