Изобретение относится к механизации животноводства.
Известно переносное устройство для снятия доильных стаканов с вымени коров, включающее силовой элемент, выполненный в виде двух камер со шкивом для наматывания тросика и переключатель вакуума [1].
Данное устройство не обеспечивает повышение эффективности машинного доения на линейных доильных установках.
Известен манипулятор доильной установки [2], включающий четыре датчика потока молока и механизмы додаивания, выполненные на каждом доильном стакане, а также доильный аппарат, который содержит двухкамерные доильные стаканы с регуляторами вакуума, коллектор с камерами, содержащими молоколовушки [3].
Однако данные устройства также не обеспечивают повышение эффективности машинного доения на линейных доильных установках.
Наиболее близким к изобретению является переносной манипулятор линейной доильной установки [4], содержащий датчик потока молока с золотниковым переключателем, пневмоцилиндр, тросом связанный с доильным аппаратом, который содержит двухкамерные доильные стаканы с регуляторами вакуума и механизмами додаивания, четырехкамерный коллектор с поплавками.
Однако данный манипулятор также не обеспечивает повышение эффективности машинного доения на линейных доильных установках.
Задачей изобретения является повышение эффективности машинного доения на линейных доильных установках.
Для достижения этого переносной манипулятор для доения коров содержит регулятор вакуума, выполненный в виде камеры управления и приемной камеры, разделенных мембраной, образующей с перегородкой щель, при этом камера управления через калиброванное отверстие соединена с вакуум-проводом и содержит электроклапан в отверстии, сообщающем ее с атмосферой; поплавок содержит магнит, взаимодействующий с герконами, которые расположены снаружи молоколовушки и установлены по высоте таким образом, что взаимодействие магнита с верхним герконом происходит при стартовом положении поплавка, соответствующем интенсивности молокоотдачи 200 мл/мин и ниже, а с нижним герконом при нижнем положении поплавка, соответствующем интенсивности молокоотдачи 50 мл/мин; внутри цилиндрического штока установлен подвижно патрубок с крестовиной, образующий с седлом штока калиброванную щель; в верхней части цилиндрического штока и его выступе выполнены пазы; пневмоклапан выполнен в виде камеры управления и камеры атмосферного давления, разделенных мембраной, которая посредством штока жестко соединена с клапаном, отделяющим камеру переменного вакуума от вакуум-провода, причем камера переменного вакуума отделена от камеры атмосферного давления перегородкой, содержащей кольцевое отверстие; камера переменного вакуума пневмоклапана содержит электроклапан и калиброванное отверстие, сообщающее ее с атмосферой, а также отверстие, нормально закрытое электроклапаном, сообщающее ее с распределителем вакуума; источник электрической энергии содержит генератор с приводом от пульсатора, содержащим рычаг, свободным концом взаимодействующий с выступами штока, а другим прикрепленный к втулке, находящейся на оси, причем к торцу втулки прикреплен сектор с зубчатым венцом, находящийся в зацеплении с шестерней генератора; поршень пневмоцилиндра содержит направляющую.
Предлагаемое изобретение будет понято из следующего описания и приложенных чертежи.
На фиг.1 приведен переносной манипулятор для доения коров, общий вид; на фиг. 2 - доильный аппарат манипулятора; на фиг.3 - принципиальная схема управления предлагаемым манипулятором; на фиг.4 - цилиндрический шток с патрубком, вид сверху; на фиг.5 - источник электрической энергии; на фиг.6 - пневмоцилиндр.
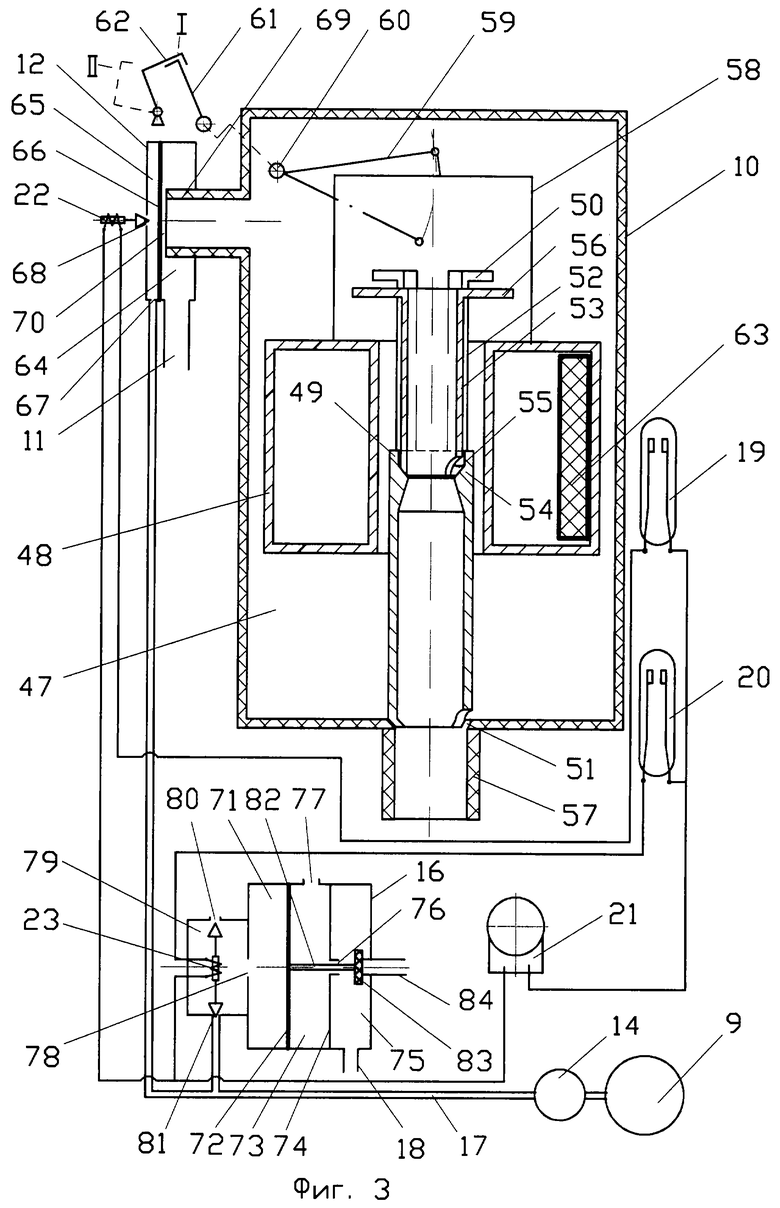
Переносной манипулятор линейной доильной установки (фиг.1) состоит из доильного аппарата 1, тросом 2 связанного с пневмоцилиндром 3, который посредством скобы 4 (с возможностью качения) прикреплен к стойке 5. Блок управления 6 посредством разъема 7 прикреплен к молокопроводу 8 и вакуум-проводу 9 линейной доильной установки АДМ-8. Датчик 10 блока управления 6 соединен с молокопроводом 8 и с доильным аппаратом 1 посредством молочного шланга 11 и регулятора вакуума 12. Пульсатор 13 с вакуум-проводом 9 соединен через распределитель 14, а с доильным аппаратом патрубком 15. Регулятор вакуума 12 и пневмоклапан 16 соединены патрубком 17 с распределителем 14. Пневмоцилиндр 3 соединен патрубком 18 с пневмоклапаном 16. Датчик потока молока содержит герконы 19 и 20, которые электрически соединены с источником электрической энергии 21 и соответственно с электроклапанами 22 и 23.
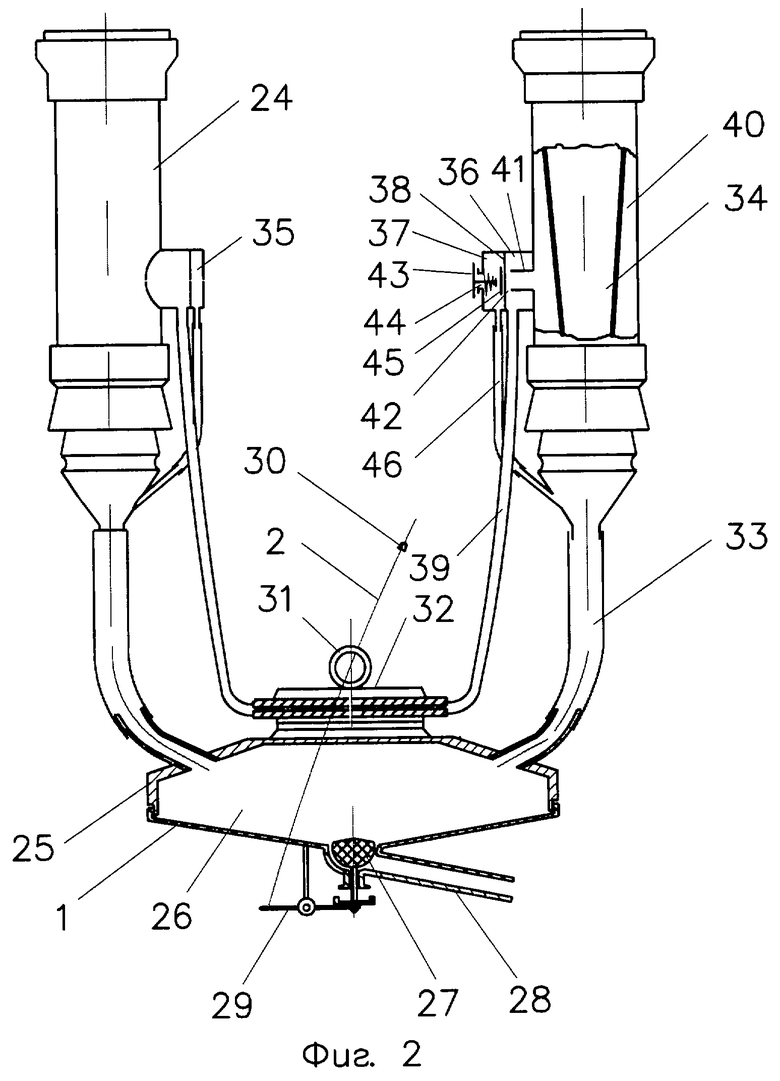
Доильный аппарат (фиг. 2) содержит двухкамерные доильные стаканы 24, коллектор 25, молокосборную камеру 26 с клапаном 27 и молокоотводным патрубком 28. К корпусу молокосборной камеры 26 шарнирно прикреплен двуплечий рычаг 29, который одни концом взаимодействует с клапаном 27, а ко второму концу прикреплен трос 2 с фиксатором 30. Трос 2 вставлен в кольцо 31, которое жестко прикреплено к центру распределителя переменного вакуума 32 коллектора 25. Молочным патрубком 33 коллектор 25 соединен с подсосковыми камерами 34 доильных стаканов 24. Доильный стакан 24 содержит регулятор вакуума 35, выполненный в виде атмосферной камеры 36 и камеры управления 37, разделенных гибкой мембраной 38. Атмосферная камера 36 посредством патрубка 39 соединена с распределителем переменного вакуума 32 коллектора 25, а от межстенной камеры 40 доильного стакана 24 отделена перегородкой 41, образующей с мембраной 38 щель 42. Камера управления 37 содержит нормально закрытое подпружиненным клапаном 43 отверстие 44, сообщающее ее с атмосферой, причем клапан 43 установлен с возможностью взаимодействия с жестким центром 45 мембраны 38. Камера управления 37 посредством патрубка 46 соединена с подсосковой камерой 34 доильного стакана 24.
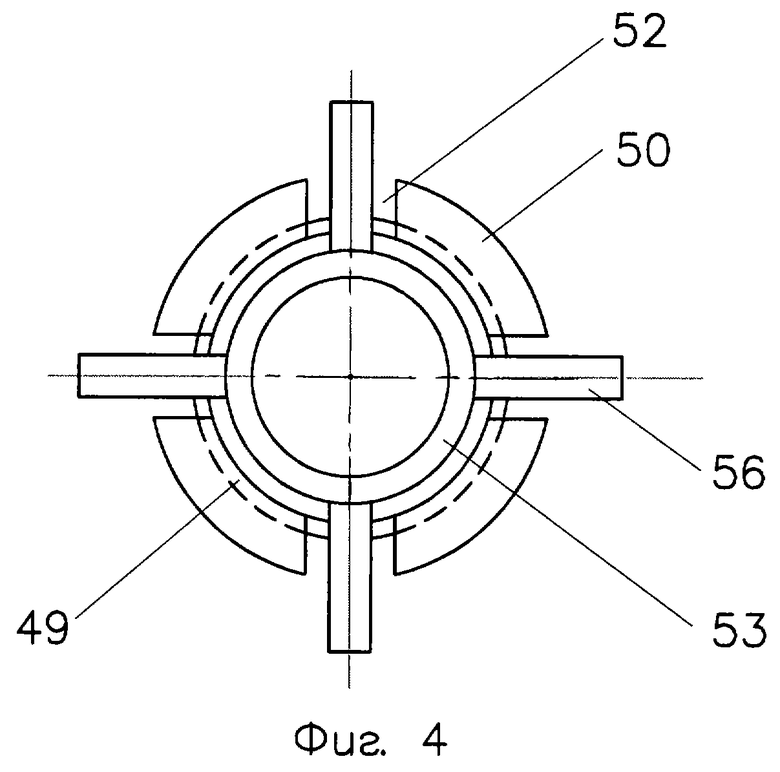
Датчик потока молока 10 (фиг.3) содержит молоколовушку 47 с поплавком 48. Внутри молоколовушки 47 установлен цилиндрический шток 49 с выступом 50, и шток 49 образует с дном молоколовушки 47 калиброванную щель 51. В верхней части цилиндрического штока 49 и его выступе 50 выполнены пазы 52. Внутри штока 49 установлен подвижно патрубок 53, образующий с седлом 54 штока 49 калиброванную щель 55. Причем для обеспечения подвижности крестовина 56 (фиг.4) патрубка 53 входит в пазы 52 выступа 50 и цилиндрического штока 49.
Пропускная способность калиброванной щели 51 (фиг. 3) составляет 50 мл/мин, а их суммарная пропускная способность с калиброванной щелью 55-200 мл/мин. Причем калиброванная щель 55 расположена на таком расстоянии от нижнего конца цилиндрического штока 49, при котором обеспечивается всплытие поплавка 48 в молоке, поступающем в молоколовушку 47 с интенсивностью более 200 мл/мин. Длина цилиндрического штока 49 от нижнего торца до выступа 50 равна ходу поплавка 48. При переполнении молоколовушки 47 молоко перетекает через верхний обрез штока 49 и далее через патрубок 57 поступает в молокопровод (на схеме не указан).
При перемещении поплавка 48 вверх, выше своего рабочего хода, он сначала взаимодействует с крестовиной 56 и приподнимает патрубок 53 над седлом 54, тем самым увеличивая калиброванную щель 55, затем взаимодействует с выступом 50 и приподнимает цилиндрический шток 49, увеличивая калиброванную щель 51, при этом происходит самоочистка калиброванных щелей 55 и 51.
В верхней части поплавок 48 содержит тягу 58, шарнирно связанную с рычагом 59 оси 60. К свободному концу оси 60 прикреплен флажок 61, взаимодействующий с шарнирно прикрепленной скобой 62. Внутри поплавка 48 расположен магнит 63, а снаружи молоколовушки 47 герконы 19 и 20. Причем они установлены (по высоте) таким образом, что взаимодействие магнита 63 с герконом 19 происходит при стартовом положении поплавка 48 и при интенсивности молокоотдачи, равной 200 мл/мин., а с герконом 20 при нижнем положении поплавка 48, то есть при интенсивности молокоотдачи - 50 мл/мин.
Регулятор вакуума 12 выполнен в виде приемной камеры 64 и камеры управления 65, разделенных гибкой мембраной 66. Камера управления 65 через калиброванную щель 67 патрубком 17 соединена с распределителем вакуума 14 и содержит нормально зарытое электроклапаном 22 отверстие 68, сообщающее ее с атмосферой. Приемная камера 64 отделена от молоколовушки 47 перегородкой 69, образующей с мембраной 66 кольцевую щель 70.
Пневмоклапан 16 выполнен в виде камеры управления 71, которая отделена мембраной 72 от камеры атмосферного давления 73, которая в свою очередь отделена перегородкой 74 от камеры переменного вакуума 75. Причем камера переменного вакуума 75 патрубком 18 соединена с пневмоцилинром 3 (фиг.1) и кольцевым отверстием 76 (фиг.3) с камерой атмосферного давления 73, которая сообщается с атмосферой посредством отверстия 77. Камера управления 71 посредством отверстия 78 сообщена с камерой переменного вакуума 79, которая содержит калиброванное отверстие 80, сообщающее ее с атмосферой, и отверстие 81, нормально закрытое электроклапаном 23, сообщающее ее посредством патрубка 17 с распределителем вакуума 14. Мембрана 72 посредством штока 82 жестко соединена с клапаном 83. Вакуум-провод 9 соединен с пневмоклапаном 16 патрубком 84 и отделен от камеры переменного вакуума 75 клапаном 83.
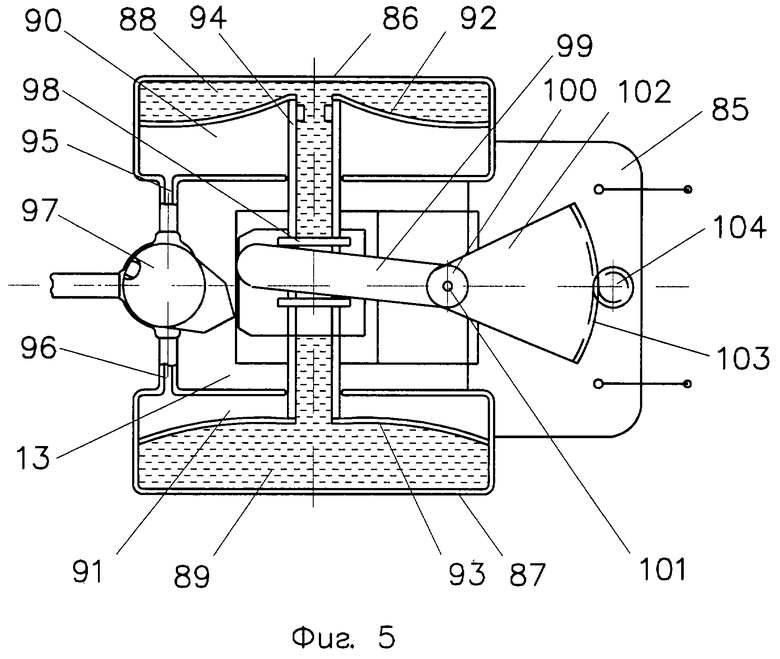
Источник электрической энергии 21 содержит генератор 85 (фиг.5) и привод от пульсатора 13. Пульсатор 13 содержит силовые камеры 86 и 87, каждая из которых выполнена в виде гидравлических камер 88, 89 и воздушных камер 90, 91, разделенных мембранами 92 и 93. В центре мембран 92 и 93 установлен шток 94, сообщающий гидравлические камеры 88 и 89 между собой. Гидравлические камеры 88, 89 и шток 94 заполнены вязкой жидкостью. Воздушные камеры 90 и 91 соответственно каналами 95 и 96 сообщены с переключателем 97, который соединен с вакуум-проводом (на схеме не показано). Шток 94 содержит выступы 98. Рычаг 99 выполнен с возможностью взаимодействия свободным концом с выступами 98, а другим прикреплен к втулке 100, которая с возможностью вращения установлена на оси 101. К торцу втулки 100 прикреплен сектор 102, зубчатый венец 103 которого находится в зацеплении с шестерней 104 генератора 85.
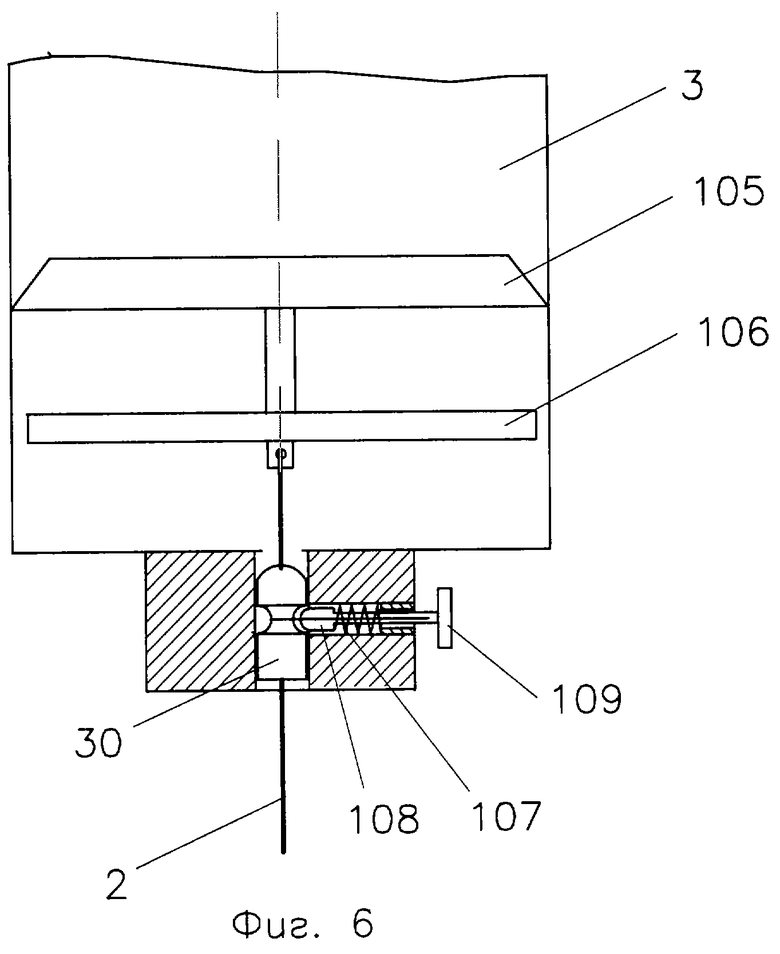
Пневмоцилиндр 3 (фиг.6) содержит поршень 105 с направляющей 106, к которой прикреплен трос 2. От самопроизвольного выдвижения из полости цилиндра 3, с одновременным перемещением поршня 105 с направляющей 106 и опусканием доильного аппарата 1 (фиг.1) вниз трос 2 удерживается жестко установленным на нем фиксатором 30, взаимодействующим с подпружиненным пружиной 107 (фиг. 6) стопором 108 с ручкой 109.
Переносной манипулятор работает следующим образом.
Пневмоцилиндр 3 (фиг.1) манипулятора скобой 4 устанавливают на стойку 5, а его блок управления 6 посредством разъемного соединения 7 соединяют с молокопроводом 8 и вакуум-проводом 9 доильной установки (на схеме не показана). При этом вакуум от распределителя 14 распространяется в пульсатор 13 и далее по патрубку 15 к распределителю переменного вакуума 32 (фиг.2) коллектора 25, с которым посредством патрубков 39 соединены атмосферные камеры 36 регуляторов вакуума 35.
Одновременно вакуум из молокопровода 8 (фиг.1) поступает в молоколовушку 47 (фиг.3) датчика потока молока 10 по патрубку 57. Из молоколовушки 47 вакуум поступает через кольцевую щель 70 в приемную камеру 64 регулятора вакуума 12. В камеру управления 65 также поступает через калиброванное отверстие 67 вакуум от вакуум-провода 9 через распределитель 14 по патрубку 17. Вследствие одинакового давления в камерах 64 и 65 мембрана 66 находится в свободном состоянии.
От распределителя 14 вакуум поступает к источнику электрической энергии 21 в пульсатор 13 (фиг.5). Переключатель 97 обеспечивает последовательное соединение воздушных камер 90 и 91 или с вакуумом, или атмосферным воздухом (на схеме не показано). При поступлении вакуума в воздушную камеру 90 силовой камеры 86 по каналу 95 происходит перемещение мембраны 92 вниз со штоком 94, с увеличением объема гидравлической камеры 88, тем самым вызывая перетекание жидкости из гидравлической камеры 89 по штоку 94 в гидравлическую камеру 88. Одновременно переключатель 97 каналом 99 сообщает воздушную камеру 91 с атмосферой. При крайнем нижнем положении штока 94 переключатель 97 сообщает воздушную камеру 91 силовой камеры 87 посредством канала 96 с вакуумом, а воздушную камеру 90 с атмосферой. При этом мембрана 93 со штоком 94 перемешается вверх, и жидкость перетекает из гидравлической камеры 88 в гидравлическую камеру 89, и цикл повторяется. При движении штока 94 в ту или иную сторону его выступы 98 воздействуют на свободный конец рычага 99, перемещая его и тем самым проворачивая втулку 100, а следовательно, и сектор 102 на оси 101. Вследствие чего зубчатый венец 103 сектора 102 приводит во вращение шестерню 104 генератора 85. Генератор 85 вырабатывает электрическую энергию, которая поступает к герконам 19, 20 и электроклапанам 22 и 23.
Датчик потока молока 10 (фиг.3) устанавливают в стартовое положение. При этом флажок 61 датчика потока молока 10 поднимают вверх и под свободный конец подставляют скобу 62, предотвращающую самопроизвольное опускание флажка 61 вниз (положение 1). Этим самым, поворачивая ось 60, и посредством рычага 59 и тяги 58 поднимают поплавок 48 вверх на величину рабочего хода. При этом магнит 62 поплавка 48 устанавливается на уровне геркона 19, и под воздействием его магнитного поля геркон 19 срабатывает и замыкает электрическую цепь. Электрическая энергия поступает к электроклапану 22, который открывает отверстия 68 регулятора вакуума 12, и атмосферный воздух поступает в камеру управления 65. В результате в камере управления 65 происходит снижение вакуума до 33 кПа, мембрана 64 вследствие разности давлений прогибается, образуя с перегородкой 69 (дросселирующую) щель 70 для прохода вакуума из молоколовушки 47 в приемную камеру 64 и далее по молочному шлангу 11 к молокоотводному патрубку 28 (фиг.2) коллектора 25, одновременно ограничивая вакуум, поступающий из молоколовушки 47 (фиг.3) до величины, равной вакууму в камере управления 65.
При этом поступление вакуума в пневмоклапан 16 с одной стороны (от распределителя 14) закрыто электроклапаном 23, а с другой (от вакуум-провода 9) клапаном 83. Так как камера управления 71 по цепочке: 78, 79, 80 сообщается с атмосферой и камера атмосферного давления 73 отверстием 77 сообщена с атмосферой, то мембрана 72 находится в свободном состоянии и не воздействует на клапан 83. При этом в камеру переменного вакуума 75 из камеры атмосферного давления 73 через кольцевое отверстие 76 поступает атмосферное давление и далее по патрубку 18 в пневмоцилиндр 3 (фиг.1).
Удерживая в руках доильный аппарат 1, выводят из зацепления с фиксатором 30 (фиг. 6) стопор 108 посредством ручки 109, преодолевая сопротивление пружины 107, тем самым освобождая трос 2. Так как пневмоцилиндр 3 пневмоклапаном 16 (фиг.1, 3) сообщен с атмосферой, то, вытаскивая трос 2 для переноса доильного аппарата 1 к вымени коровы (на схеме не показано), перемещают вниз поршень 105 (фиг.6) с направляющей 106. Доильный аппарат 1 (фиг.2) подносят к вымени коровы и открывают клапан 27. При этом пониженный вакуум по патрубку 28 распространяется в молокосборную камеру 26 и далее по молочному патрубку 33 в подсосковую камеру 34 доильного стакана 24, а также по патрубку 46 в камеру управления 37 регулятора вакуума 35 в межстенной камере 40. До надевания доильного стакана 24 на сосок вымени животного в подсосковой камере 34 и молочном патрубке 33 будет атмосферное давление. Это же атмосферное давление по патрубку 46 распространяется в камеру управления 37 регулятора вакуума 35. Вакуум, подаваемый при такте сосания от пульсатора 13 (фиг. 1) по патрубку 15 к распределителю переменного вакуума 32 (фиг.2) и далее по патрубку 39 в атмосферную камеру 36, прогибает мембрану 38, закрывая щель 42, образованную мембраной 38 и перегородкой 41, перекрывая поступление вакуума в межстенную камеру 40 доильного стакана 24.
После надевания доильных стаканов 24 на доли вымени коровы в их подсосковых камерах 34 устанавливается стимулирующий вакуум, равный 33 кПа. Этот же стимулирующий вакуум по патрубку 46 поступает в камеру управления 37 регулятора вакуума 35. При этом мембрана 38 прогибается, образуя с перегородкой 41 щель 42 для прохода вакуума из атмосферной камеры 36 в межстенную камеру 40 доильного стакана 24, одновременно ограничивая вакуум, поступающий из атмосферной камеры 36 до величины, равной вакууму в камере управления 37.
При такте сжатия в атмосферную камеру 36 подается атмосферное давление, а в управляющей камере 37 давление, равное 33 кПа, в результате чего мембрана 38 сильнее прогибается, увеличивая щель 42 для прохода воздуха из атмосферной камеры 36 в межстенную камеру 40, и одновременно своим жестким центром 45 воздействует на подпружиненный клапан 43, который открывает отверстие 44 и сообщает камеру управления 37 с атмосферой. При этом атмосферный воздух по патрубку 46 поступает в молочный патрубок 33, тем самым улучшая транспортировку молока в коллектор 25. Таким образом осуществляется доение стимулирующим вакуумом в начале доения.
Молоко поступает из подсосковой камеры 34 по молочному патрубку 33 в молокосборную камеру 26 коллектора 25 и далее по молокоотводному патрубку 28 и молочному шлангу 11 (фиг.1) в приемную камеру 64 (фиг.3) регулятора вакуума 12 и через щель 70 в молоколовушку 47, откуда, если интенсивность потока не превышает 50 мл/мин, через калиброванную щель 51 и далее по патрубку 57 в молокопровод (на схеме не показан).
При увеличении поступления молока происходит заполнение молоколовушки 47. При достижении уровня молока калиброванной щели 55 молоко начинает истекать через нее, если интенсивность потока не превышает 200 мл/мин, и далее по цилиндрическому штоку 49, по патрубку 57 в молокопровод (на схеме не показан). При увеличении потока молока свыше 200 мл/мин происходит дальнейшее заполнение молоколовушки 47, и поплавок 48 с магнитом 63 всплывает. Вследствие чего его магнитное поле прекращает воздействовать на геркон 19, и он размыкает электрическую цепь, подающую напряжение к электроклапану 22, который закрывает отверстие 68 регулятора вакуума 12, прекращая тем самым доступ атмосферного воздуха в камеру управления 65. В результате в камере управления 65 устанавливается вакуум, равный вакууму в молоколовушке 47. При этом происходит выравнивание мембраны 66 и за счет увеличения щели 70 увеличивается отсос воздуха из приемной камеры 64. Вакуум в приемной камере 64 увеличивается и становится равным вакууму в камере управления 65, то есть вакууму в вакуум-магистрали. Из приемной камеры 64 вакуум по молочному шлангу 11, по патрубку 28 (фиг.2) распространяется в молокосборную камеру 26 и далее по молочному патрубку 33 в подсосковую камеру 34 доильного стакана 24, а по патрубку 46 в камеру управления 37 регулятора вакуума 35. В результате мембрана 38 выравнивается и щель 42, образованная перегородкой 41 и мембраной 38, увеличивается, тем самым обеспечивая поступление в такте сосания номинального вакуума в межстенную камеру 40 доильного стакана 24 из атмосферной камеры 36, куда поступает он по патрубку 39 из распределителя переменного вакуума 32. Доение осуществляется номинальным вакуумом.
При всплытии поплавка 48 (фиг.3) он сначала за крестовину 56 приподнимает подвижный патрубок 53 над седлом 54, увеличивая калиброванную щель 55, а затем после вхождения крестовины 56 (фиг.4) в пазы 52 выступа 50, осуществляет подъем и цилиндрического штока 49 (фиг.3) над дном молоколовушки 47, увеличивая калиброванную щель 51. Увеличение калиброванных щелей 55 и 51 создает условие для их самоочистки. Излишнее молоко через верхний обрез цилиндрического штока 49 по патрубку 57 также поступает в молокопровод (на схеме не показан).
С началом подъема поплавка 48 он посредством тяги 58 и рычага 59 проворачивает ось 60 и опускает флажок 61, тем самым освобождая скобу 62, которая под своим весом проворачивается вниз (положение II). Датчик потока молока 10 переходит в режим автоматического контроля потока молока.
При снижении потока молока, поступающего от доильного аппарата 1 (фиг.1) в датчик потока молока 10, поплавок 48 (фиг.3) вследствие снижения уровня молока в молоколовушке 47 опускается. При этом опускается цилиндрический шток 49, образуя с дном молоколовушки 47 калиброванную щель 51. Также опускается и подвижный патрубок 53, образуя с седлом 54 калиброванную щель 55. С этого момента калиброванные щели 55 и 51 обеспечивают контроль истечения молока.
При снижении интенсивности потока молока до 200 мл/мин поплавок 48 занимает положение (стартовое положение), определяемое положением калиброванной щели 55. Магнит 63 устанавливается на уровне геркона 19, и под воздействием его магнитного поля геркон 19 срабатывает, замыкая электрическую цепь. Электрическая энергия поступает к электроклапану 22, который открывает отверстие 68 и тем самым обеспечивает доступ атмосферного воздуха в камеру управления 65 регулятора вакуума 12. Величина вакуума в камере управления 65 становится равной вакууму стимулирующего воздействия. При этом мембрана 66 прогибается, уменьшая щель 70 и тем самым уменьшая отсос воздуха из приемной камеры 64. В результате в молочном шланге 11, молокосборной камере 26 (фиг.2), молочном патрубке 33 и далее в подсосковой камере 34, а также в камере управления 37 регулятора вакуума 35 и как следствие в межстенной камере 40 доильного стакана 24 установится низкий вакуум. Таким образом осуществляется фаза додаивания. Если при этом интенсивность потока молока увеличивается, то датчик потока молока 10 вновь осуществит переключение на доение номинальным вакуумом.
При снижении интенсивности потока молока до 50 мл/мин поплавок 48 занимает нижнее положение. При этом положении под воздействием магнитного поля магнита 63 геркон 20 замыкает электрическую цепь, подающую электрическую энергию к электроклапану 23. В результате чего электроклапан 23 закрывает отверстие 80, прекращая тем самым доступ атмосферного воздуха в камеру переменного вакуума 79, одновременно открывает отверстие 81, сообщая ее посредством патрубка 17 с распределителем вакуума 14. Вакуум, поступивший в камеру переменного вакуума 79 через отверстие 78, распространяется в камеру управления 71. Вследствие разности давлений мембрана 72 прогибается, увлекая за собой посредством штока 82 клапан 83. При этом клапан 83 закрывает кольцевое отверстие 76, тем самым прекращая доступ атмосферного воздуха в камеру переменного вакуума 75, и сообщает ее посредством патрубка 84 с вакуум-проводом 9. Вакуум из камеры переменного вакуума 75 по патрубку 18 поступает в пневмоцилиндр 3 (фиг. 6). Под действием вакуума поршень 105 с направляющей 106, перемещаясь в пневмоцилиндре 3 вверх, втягивает трос 2 внутрь, причем при натяжении троса 2 пневмоцилиндр 3, проворачиваясь скобой 4 (фиг.1) на стойке 5, отклоняется от вертикального положения в направлении доильного аппарата 1. Трос 2, натягиваясь, воздействуя на рычаг 29 (фиг.2), который клапаном 27 закрывает доступ вакуума в молокосборную камеру 26, то есть отключает доильный аппарат 1. При дальнейшем перемещении троса 2 происходит снятие доильного аппарата 1 с вымени коровы. Перемещение поршня 105 (фиг.6), а вместе с ним троса 2 и доильного аппарата 1 (фиг.1) происходит до фиксации фиксатора 30 (фиг.6) стопором 107. Так как трос 2 проходит через кольцо 31 (фиг.2), прикрепленное к центру распределителя переменного вакуума 32, то коллектор 25 с доильными стаканами 24 сохраняет свое первоначальное положение, тем самым обеспечивается максимальное удаление их от поверхности пола. Затем отсоединяют блок управления 6 (фиг.1), снимают пневмоцилиндр 3 со стойки 5 и переносят манипулятор к следующей корове.
Источники информации
1. Авторское свидетельство СССР 1628993, кл. А 01 J 7/00.
2. Авторское свидетельство СССР 1750511, кл. А 01 J 7/00.
3. Авторское свидетельство СССР 1507265, кл. А 01 J 5/04.
4. Патент РФ 2151499, кл. А 01 J 7/00, 5/007.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2005 |
|
RU2288577C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2005 |
|
RU2313937C2 |
| Переносной манипулятор для доения коров | 2017 |
|
RU2649668C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2008 |
|
RU2348149C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| Переносной манипулятор для доения коров | 2018 |
|
RU2695868C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2008 |
|
RU2367148C1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2801542C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ПОДГОТОВКИ КОРОВ К ЗАПУСКУ В ПРОЦЕССЕ ДОЕНИЯ | 2009 |
|
RU2388216C1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2812332C1 |
Изобретение относится к механизации животноводства. Устройство состоит из доильного аппарата 1, тросом 2 соединенного с пневмоцилиндром 3 и посредством молочного шланга 11 и патрубка 15 с блоком управления 6. Блок управления 6 посредством разъемного соединения 7 прикреплен к вакуум-проводу 9 и молокопроводу 8 линейной доильной установки и содержит датчик потока молока 10 с регулятором вакуума 12, пневмоклапан 16 и источник электрической энергии 21. Доильный аппарат 1 содержит двухкамерные доильные стаканы с регуляторами вакуума и коллектор с клапаном и молокоотводным патрубком. Датчик потока молока 10 содержит поплавок с магнитом и два геркона 19 и 20. Молоко, поступая из коллектора в датчик потока молока 10 с различной интенсивностью, вызывает перемещение поплавка с магнитом. При воздействии магнитного поля магнита на верхний геркон 19 происходит управление работой электроклапана 22 регулятора вакуума 12, а на нижний геркон 20 - электроклапана 23 пневмоклапана 16, управляющего работой пневмоцилиндра 3. Устройство повышает эффективность машинного доения на линейных доильных установках. 7 з.п. ф-лы, 6 ил.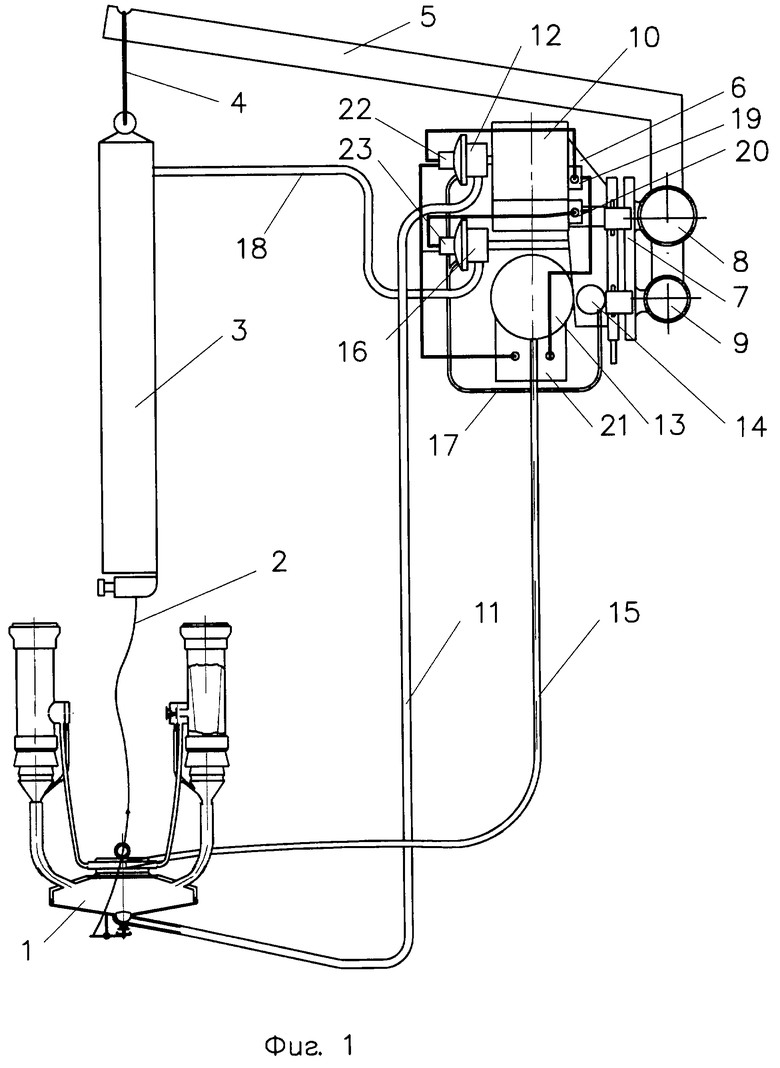
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ | 1992 |
|
RU2041622C1 |
| Манипулятор доильной установки | 1990 |
|
SU1750511A1 |

