1
Изобретение относится к области гидростатических опор и может найти применение в гидростатических опорах машин с адаптивным управлением.
Известен делитель расхода для гидростатической опоры, выполненный в виде сопл, сообщенных с несущими карманами гидростатической опоры, и упруго подвешенной между соплами заслонки fl.
Известный делитель расхода не позволяет контролировать нагрузку на опору по разности давлений в ее несущих карманах. Поэтому для контроля нагрузок к карманам присоединяют специальные датчик давлений, что усложняет конструкцию опоры, ухудшает характеристики, снижает ее надежность и затрудняет собственно контроль нагрузок, на опору.
Целью изобретения является контроль разности давлений в несущих карманах гидростатической опоры.
Указанн ая цель достигается тем, что делитель расхода снабжен датчиком перемещений заслонки. Датчик перемещений
может быть выполнен в виде тензометрических преобразователей, установленных на упругом подвесе заслонки.
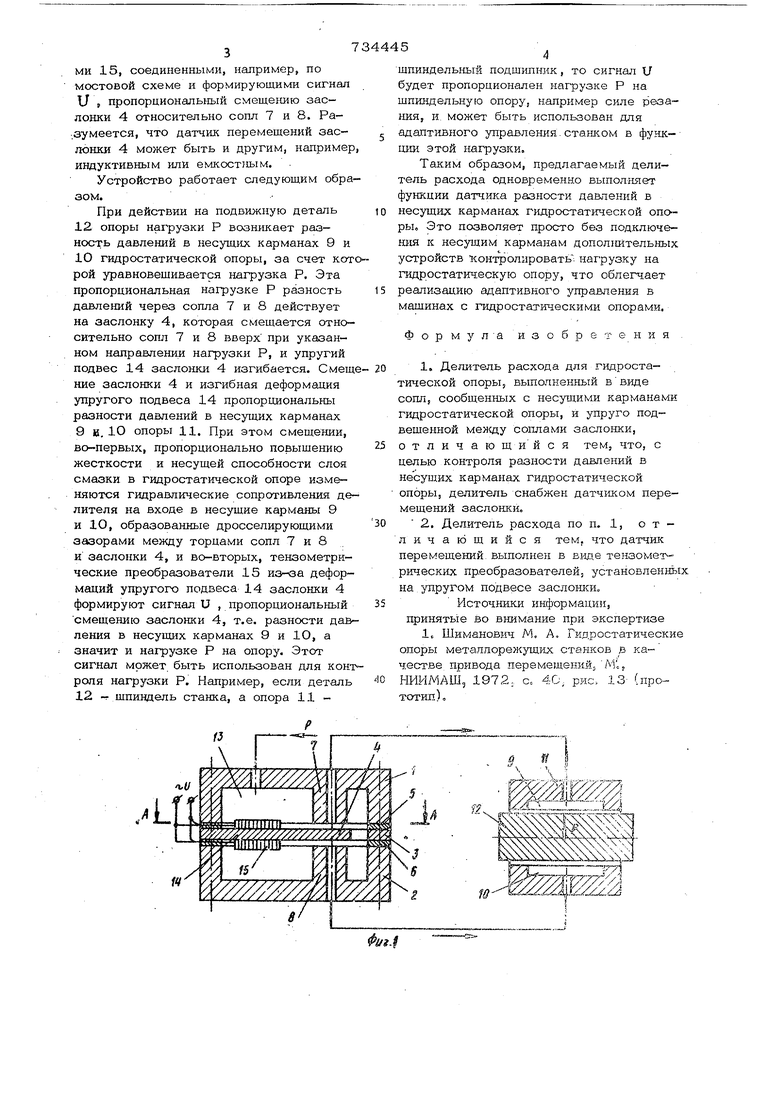
На фиг. 1 показан делитель/ расхода с гвдростатической опорой: на фиг. 2 разрез А-А на фиг. 1.
Между верхней 1 и нижней 2 частями корпуса делителя расхода сжаты пластина 3, в которой вырезана заслонка 4, и герметизирующие мерные прокладки 5 и 6. В частях 1 и 2 корпуса выполнены сопла 7 и 8, соединенные с противоположными несущими карманами 9 и 1О гидростатической опоры 11, в которой расположена подвижная деталь 12. Дросселирующие зазоры делителя между соплами 7 и 8 и заслонкой 4 определяют прокладки 5 и 6. Полость 13 делителя расхода соединена с источником давления Р смазки. Делитель расхода снабжен датчиком перемещений заслонки 4, в данном случае, образованным наклеенными на упругом подвесе 14 заслонки 4 тензометрическими преобразователями 15, соединенными, налример, по мостовой схеме и формирующими сигнал и , пропорциональный смещению заслонки 4 относительно сопл 7 и 8. Ра аумеется, что датчик перемещений заслонки 4 может быть и другим, например индуктивным или емкост 1ым. Устройство работает следующим обра зом. При действии на подвижную деталь 12 опоры нагрузки Р возникает разность давлений в несущих карманах 9 и 10 гидростатической опоры, за счет кот рой уравновешивается нагрузка Р. Эта пропорциональная нагрузке Р разность давлений через сопла 7 и 8 действует на заслонку 4, которая смещается относительно сопл 7 и 8 вверх при указанном направлении нагрузки Р, и упругий подвес 14 заслонки 4 изгибается. Смещ ние заслонки 4 и изгибная деформация упругого подвеса 14 пропорциональны разности давлений в несущих карманах 9 и. 10 опоры 11. При этом смещении, во-первых, пропорционально повыщению жесткости и несущей способности слоя смазки в гидростатической опоре изменяются гидравлические сопротивления де лителя на входе в несущие карманы 9 и 10, образованные дросселирующими зазорами между торцами сопл 7 и 8 и заслонки 4, и во-вторых, тензометри- ческие преобразователи 15 иэ-за деформаций упругого подвеса 14 заслонки 4 формируют сигнал U , пропорциональный смещению заслонки 4, т.е. разности дав ления в несущих карманах 9 и 1О, а значит и нагрузке Р на опору. Этот сигнал может быть использован для кон роля нагрузки Р. Например, если деталь 12 -г шпиндель станка, а опора 11 щпинделы1Ый подшипник, то сигнал U будет пропорционален нагрузке Р на шпиндельнуво опору, налример силе резания, и, может быть использован для адаптивного управления сташ-сом в фуш.- шш этой наг1оуаки. Таким образом, предлагаемый делитель расхода одновременно выполняет функции датчика разности давлений в несущих карманах гидростатической опоры. Это позволяет просто без подключения к несущим карманам дополнительных устройств хонтролировать. нагрузку на падростатическую опору, что облегчает реализацию адаптивного управления в мащинах с гидростатическими опорами. ула изобр Форм е н и я 1.Делитель расхода для гидростатической опоры, выполненный ввиде сопл, сообщенных с несущими карманами гидростатической опоры, и упруго подвещенной между соплами заслонки, отличающийся тем, что, с целью контроля разности давлений в несущих карманах гидростатической опоры, делитель снабжен датчиком перемещений заслонки, 2.Делитель расхода по п. 1, о т личакэщийся тем, что датчик перемещений, выполнен в виде тензометрических преобразователей, установленньгх на упругом подвесе заслошси. Источники информации, принятые JBO В1вимание при экспертизе 1. Шиманович М. А. Гидростатические опоры металлорежущих станков р качестве привода перемещений; AT,., НИИМАШ, 1972, с 40, ряс, 13 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельный узел | 1982 |
|
SU1051340A1 |
| Гидравлический регулятор | 1982 |
|
SU1121654A1 |
| Шпиндельный узел | 1979 |
|
SU848146A1 |
| РЕГУЛЯТОР ДЛЯ ГИДРОСТАТИЧЕСКИХ ОПОР | 2011 |
|
RU2487280C1 |
| Шпиндельный узел станка | 1990 |
|
SU1796343A1 |
| РЕГУЛЯТОР ДЛЯ ГИДРОСТАТИЧЕСКИХ ОПОР | 2007 |
|
RU2349438C2 |
| Регулятор для гидростатических опор | 1982 |
|
SU1033785A1 |
| Регулятор расхода для гидростатической опоры | 1979 |
|
SU769502A1 |
| ГИДРОСТАТИЧЕСКАЯ ОПОРА | 1989 |
|
SU1826646A1 |
| ШПИНДЕЛЬНЫЙ УЗЕЛ | 2015 |
|
RU2621524C2 |

